
Catalyst for Gradient-based Nonconvex Optimization
Courtney Paquette Hongzhou Lin Dmitriy Drusvyatskiy
Lehigh University Massachusetts Institute of Technology University of Washington
Julien Mairal Zaid Harchaoui
Inria University of Washington
Abstract
We introduce a generic scheme to solve non-
convex optimization problems using gradient-
based algorithms originally designed for mini-
mizing convex functions. Even though these
methods may originally require convexity to
operate, the proposed approach allows one
to use them without assuming any knowl-
edge about the convexity of the objective.
In general, the scheme is guaranteed to pro-
duce a stationary point with a worst-case ef-
ficiency typical of first-order methods, and
when the objective turns out to be convex,
it automatically accelerates in the sense of
Nesterov and achieves near-optimal conver-
gence rate in function values. We conclude
the paper by showing promising experimental
results obtained by applying our approach to
incremental algorithms such as SVRG and
SAGA for sparse matrix factorization and for
learning neural networks.
1 Introduction
We consider optimization problems of the form
min
x∈R
p
(
f(x) ,
1
n
n
X
i=1
f
i
(x) + ψ(x)
)
. (1)
Here, we set
¯
R
:=
R ∪ {∞}
, each function
f
i
: R
p
→ R
is smooth, and the regularization
ψ : R
p
→
¯
R
may
be nonsmooth. By considering extended-real-valued
functions, this composite setting also encompasses con-
strained minimization by letting
ψ
be the indicator
function of computationally tractable constraints on
x
.
Proceedings of the 21
st
International Conference on Artifi-
cial Intelligence and Statistics (AISTATS) 2018, Lanzarote,
Spain. PMLR: Volume 84. Copyright 2018 by the author(s).
Minimization of a regularized empirical risk objective
of form (1) is central in machine learning. Whereas a
significant amount of work has been devoted to this
setting for convex problems, leading in particular to fast
incremental algorithms [see, e.g.,
9
,
18
,
23
,
32
,
33
,
34
],
the question of minimizing efficiently (1) when the
functions
f
i
and
ψ
may be nonconvex is still largely
open today.
Yet, nonconvex problems in machine learning are of
utmost interest. For instance, the variable
x
may rep-
resent the parameters of a neural network, where each
term
f
i
(
x
) measures the fit between
x
and a data point
indexed by
i
, or (1) may correspond to a nonconvex
matrix factorization problem (see Section 6). Besides,
even when the data-fitting functions
f
i
are convex, it
is also typical to consider nonconvex regularization
functions
ψ
, for example for feature selection in signal
processing [
14
]. Motivated by these facts, we address
two questions from nonconvex optimization:
1.
How to apply a method for convex optimization
to a nonconvex problem?
2.
How to design an algorithm that does not need
to know whether the objective function is convex
while obtaining the optimal convergence guarantee
if the function is convex?
Several works have attempted to transfer ideas from the
convex world to the nonconvex one, see, e.g., [
12
,
13
].
Our paper has a similar goal and studies the extension
of Nesterov’s acceleration for convex problems [
25
] to
nonconvex composite ones. For
C
1
-smooth and non-
convex problems, gradient descent is optimal among
first-order methods in terms of information-based com-
plexity to find an
ε
-stationary point [
5
][Thm. 2 Sec.
5]. Without additional assumptions, worst case com-
plexity for first-order methods can not achieve better
than
O
(
ε
−2
) oracle queries [
7
,
8
]. Under a stronger
assumption that the objective function is
C
2
-smooth,
state-of-the-art methods [e.g.,
4
,
6
] using Hessian-vector
product only achieve marginal gain with complexity
O(ε
−7/4
log(1/ε)) in more limited settings than ours.
Catalyst for Gradient-based Nonconvex Optimization
For this reason, our work fits within a broader stream
of research on methods that do not perform worse than
gradient descent in the nonconvex case (in terms of
worst-case complexity), while automatically accelerat-
ing for minimizing convex functions. The hope is to
see acceleration in practice for nonconvex problems,
by exploiting “hidden” convexity in the objective (e.g.,
local convexity near the optimum, or convexity along
the trajectory of iterates).
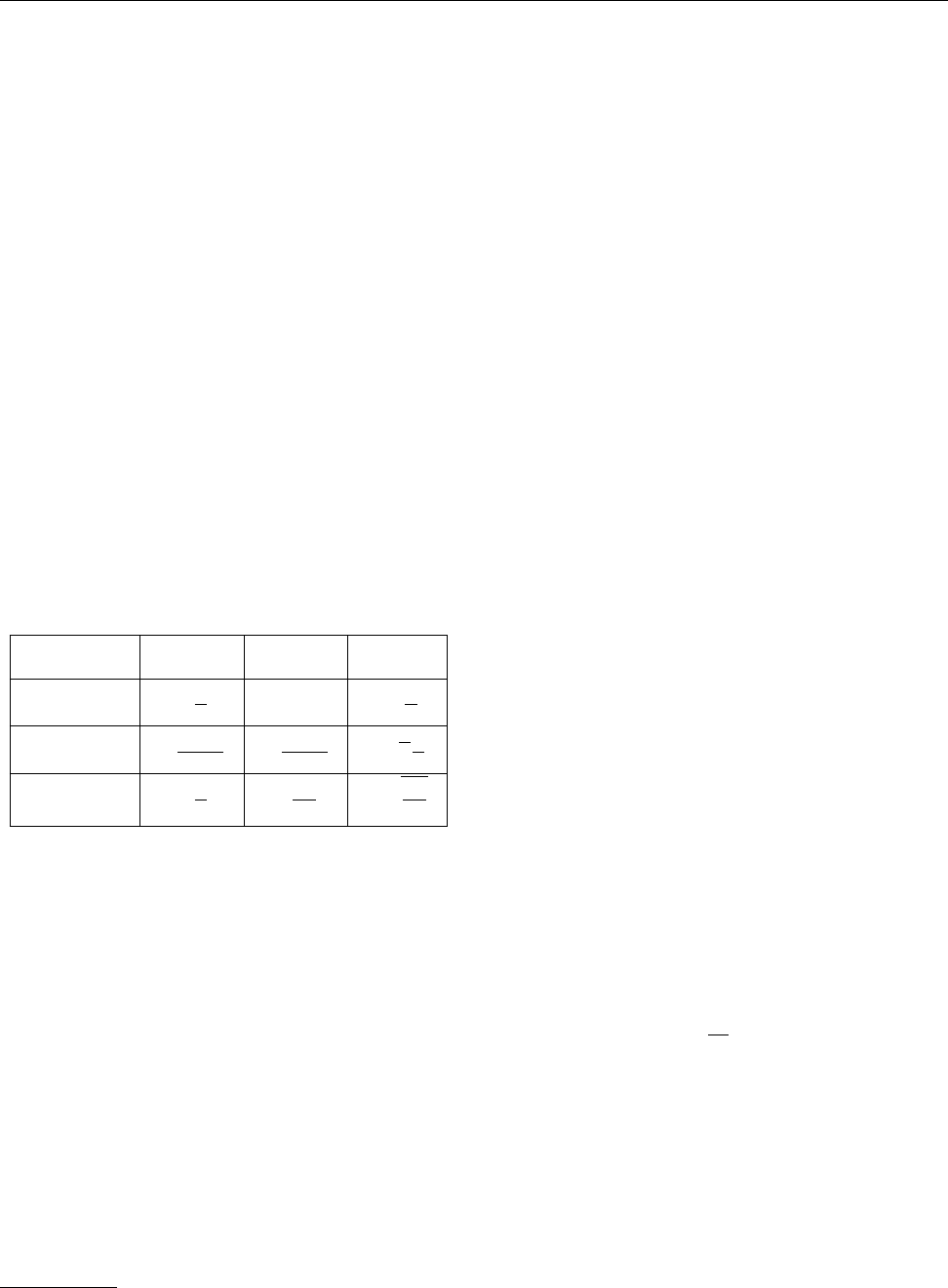
Table 1: Comparison of rates of convergence when ap-
plying 4WD-Catalyst to SVRG. In the convex case,
we present the complexity in terms of number of itera-
tions to obtain a point
x
satisfying
f
(
x
)
− f
∗
< ε
. In
the nonconvex case, we consider instead the guarantee
dist
(0
, ∂f
(
x
))
< ε
. Note that the theoretical stepsize of
ncvx-SVRG is much smaller than that of our algorithm
and of the original SVRG. In practice, the choice of a
small stepsize significantly slows down the performance
(see Section 6), and ncvx-SVRG is often heuristically
used with a larger stepsize in practice, which is not
allowed by theory, see [
30
]. A mini-batch version of
SVRG is also proposed there, allowing large stepsizes
of
O
(1
/L
), but without changing the global complexity.
A similar table for SAGA [9] is provided in [28].
Th. stepsize Nonconvex Convex
SVRG [34] O
1
L
not avail. O
n
L
ε
ncvx-SVRG
[2, 29, 30]
O
1
n
2/3
L
O
n
2/3
L
ε
2
O
√
n
L
ε
4WD-Catalyst
-SVRG
O
1
L
˜
O
nL
ε
2
˜
O
r
nL
ε
!
Our main contribution is a generic meta-algorithm,
dubbed 4WD-Catalyst, which is able to use an optimiza-
tion method
M
, originally designed for convex prob-
lems, and turn it into an accelerated scheme that also
applies to nonconvex objectives. 4WD-Catalyst can be
seen as a
4
-
W
heel-
D
rive extension of Catalyst [
22
] to
all optimization “terrains”. Specifically, without know-
ing whether the objective function is convex or not, our
algorithm may take a method
M
designed for convex
optimization problems with the same structure as (1),
e.g., SAGA [
9
], SVRG [
34
], and apply
M
to a sequence
of sub-problems such that it provides a stationary point
of the nonconvex objective. Overall, the number of iter-
ations of
M
to obtain a gradient norm smaller than
ε
is
˜
O
(
ε
−2
) in the worst case, while automatically reducing
to
˜
O
(
ε
−2/3
) if the function is convex.
1
We provide the
detailed proofs and the extensive experimental results
in the longer version of this work [28].
1
In this section, the notation
˜
O
only displays the poly-
nomial dependency with respect to ε for simplicity.
Related work.
Inspired by Nesterov’s fast gradient
method for convex optimization [
26
], the first acceler-
ated methods performing universally well for nonconvex
and convex problems were introduced in [
12
,
13
]. Specif-
ically, the most recent approach [
13
] addresses compos-
ite problems such as (1) with
n
=1, and performs no
worse than gradient descent on nonconvex instances
with complexity
O
(
ε
−2
) on the gradient norm. When
the problem is convex, it accelerates with complexity
O
(
ε
−2/3
). Extensions to Gauss-Newton methods were
also recently developed in [
10
]. Whether accelerated
methods are superior to gradient descent on noncon-
vex problems remains open; however their performance
escaping saddle points faster than gradient descent has
been observed [15, 27].
In [
21
], a similar strategy is proposed, focusing instead
on convergence guarantees under the so-called Kurdyka-
Łojasiewicz inequality. Our scheme is in the same spirit
as these previous papers, since it monotonically inter-
laces proximal-point steps (instead of proximal-gradient
as in [
13
]) and extrapolation/acceleration steps. A fun-
damental difference is that our method is generic and
can be used to accelerate a given optimization method,
which is not the purpose of these previous papers.
By considering
C
2
-smooth nonconvex objective func-
tions
f
with Lipschitz continuous gradient
∇f
and
Hessian
∇
2
f
, the authors of [
4
] propose an algorithm
with complexity
O
(
ε
−7/4
log
(1
/ε
)), based on iteratively
solving convex subproblems closely related to the origi-
nal problem. It is not clear if the complexity of their
algorithm improves in the convex setting. Note also
that the algorithm proposed in [
4
] is inherently for
C
2
-smooth minimization. This implies that the scheme
does not allow incorporating nonsmooth regularizers
and cannot exploit finite-sum structure.
In [
30
], stochastic methods for minimizing
(1)
are pro-
posed using variants of SVRG [
16
] and SAGA [
9
]. These
schemes work for both convex and nonconvex settings
and achieve convergence guarantees of
O
(
Ln/ε
) (con-
vex) and
O
(
n
2/3
L/ε
2
) (nonconvex). Although for non-
convex problems our scheme in its worst case only
guarantees a rate of
˜
O
nL
ε
2
, we attain the optimal
accelerated rate in the convex setting (See Table 1).
The empirical results of [
30
] used a step size of order
1
/L
, but their theoretical analysis without minibatch
requires a much smaller stepsize, 1
/
(
n
2/3
L
), whereas
our analysis is able to use the 1/L stepsize.
A stochastic scheme for minimizing
(1)
under the non-
convex but smooth setting was recently considered in
[
20
]. The method can be seen a nonconvex variant of
the stochastically controlled stochastic gradient (SCSG)
methods [
19
]. If the target accuracy is small, then the
method performs no worse than nonconvex SVRG [
30
].
Courtney Paquette, Hongzhou Lin, Dmitriy Drusvyatskiy, Julien Mairal, Zaid Harchaoui
If the target accuracy is large, then the method achieves
a rate better than SGD. The proposed scheme does not
allow nonsmooth regularizers and it is unclear whether
numerically the scheme performs as well as SVRG.
Finally, a method related to SVRG [
16
] for minimiz-
ing large sums while automatically adapting to the
weak convexity constant of the objective function, is
proposed in [1]. When the weak convexity constant is
small (i.e., the function is nearly convex), the proposed
method enjoys an improved efficiency estimate. This
algorithm, however, does not automatically accelerate
for convex problems, in the sense that the rate is slower
than
O
(
ε
−3/2
) in terms of target accuracy
ε
on the
gradient norm.
2 Tools for Nonconvex Optimization
In this paper, we focus on a broad class of nonconvex
functions known as weakly convex or lower
C
2
functions,
which covers most of the interesting cases of interest
in machine learning and resemble convex functions in
many aspects.
Definition 2.1
(Weak convexity)
.
A function
f : R
p
→ R
is
ρ−
weakly convex if for any points
x, y
in
R
p
and for any
λ
in [0
,
1], the approximate secant
inequality holds:
f(λx + (1 − λ)y) ≤ λf(x) + (1 − λ)f(y)
+
ρλ(1−λ)
2
kx − yk
2
.
Remark 2.2.
When
ρ
= 0, the above definition re-
duces to the classical definition of convex functions.
Proposition 2.3.
A function
f
is
ρ−
weakly convex if
and only if the function f
ρ
is convex, where
f
ρ
(x) , f(x) +
ρ
2
kxk
2
.
Corollary 2.4.
If
f
is twice differentiable, then
f
is
ρ
-weakly convex if and only if
∇
2
f
(
x
)
−ρI
for all
x
.
Intuitively, a function is weakly convex when it is
“nearly convex” up to a quadratic function. This repre-
sents a complementary notion of the strong convexity.
Proposition 2.5.
If a function
f
is differentiable and
its gradient is Lipschitz continuous with Lipschitz pa-
rameter L, then f is L-weakly convex.
We give the proofs of the above propositions in Sections
2 and 3 of [
28
]. We remark that for most of the interest-
ing machine learning problems, the smooth part of the
objective function admits Lipchitz gradients, meaning
that the function is weakly convex.
Tools for nonsmooth optimization
Convergence
results for nonsmooth optimization typically rely on
the concept of subdifferential. However, the general-
ization of the subdifferential to nonconvex nonsmooth
functions is not unique [
3
]. With the weak convexity
in hand, all these constructions coincide and therefore
we will abuse standard notation slightly, as set out for
example in Rockafellar and Wets [31].
Definition 2.6
(Subdifferential)
.
Consider a function
f : R
p
→ R
and a point
x
with
f
(
x
) finite. The subdif-
ferential of f at x is the set
∂f(x):={ξ ∈ R
p
: f(y)≥f(x) + ξ
T
(y − x)
+ o(ky − xk), ∀y ∈ R
p
}.
Thus, a vector
ξ
lies in
∂f
(
x
) whenever the linear
function
y 7→ f
(
x
) +
ξ
T
(
y − x
) is a lower model of
f
,
up to first order around
x
. In particular, the subd-
ifferential
∂f
(
x
) of a differentiable function
f
is the
singleton
{∇f
(
x
)
}
; while for a convex function
f
it
coincides with the subdifferential in the sense of convex
analysis [see
31
, Exercise 8.8]. Moreover, the following
sum rule,
∂(f + g)(x) = ∂f(x) + ∇g(x),
holds for any differentiable function g.
In nonconvex optimization, standard complexity
bounds are derived to guarantee
dist
0, ∂f (x)
≤ ε .
When
ε
= 0, we are at a stationary point and first-order
optimality conditions are satisfied. For functions that
are nonconvex, first-order methods search for points
with small subgradients, which does not necessarily
imply small function values, in contrast to convex func-
tions where the two criteria are much closer related.
3 The 4WD-Catalyst Algorithm
We present here our main algorithm called 4WD-
Catalyst. The proposed approach extends the Catalyst
method [
22
] to potentially nonconvex problems, while
enjoying the two following properties:
1.
When the problem is nonconvex, the algorithm au-
tomatically adapts to the unknown weak convexity
constant ρ.
2.
When the problem is convex, the algorithm auto-
matically accelerates in the sense of Nesterov, pro-
viding near-optimal convergence rates for first-order
methods.
Main goal.
As in the regular Catalyst algorithm
of [
22
], the proposed scheme wraps in an outer loop
a minimization algorithm
M
used in an inner loop.
The goal is to leverage a method
M
that is able to
Catalyst for Gradient-based Nonconvex Optimization
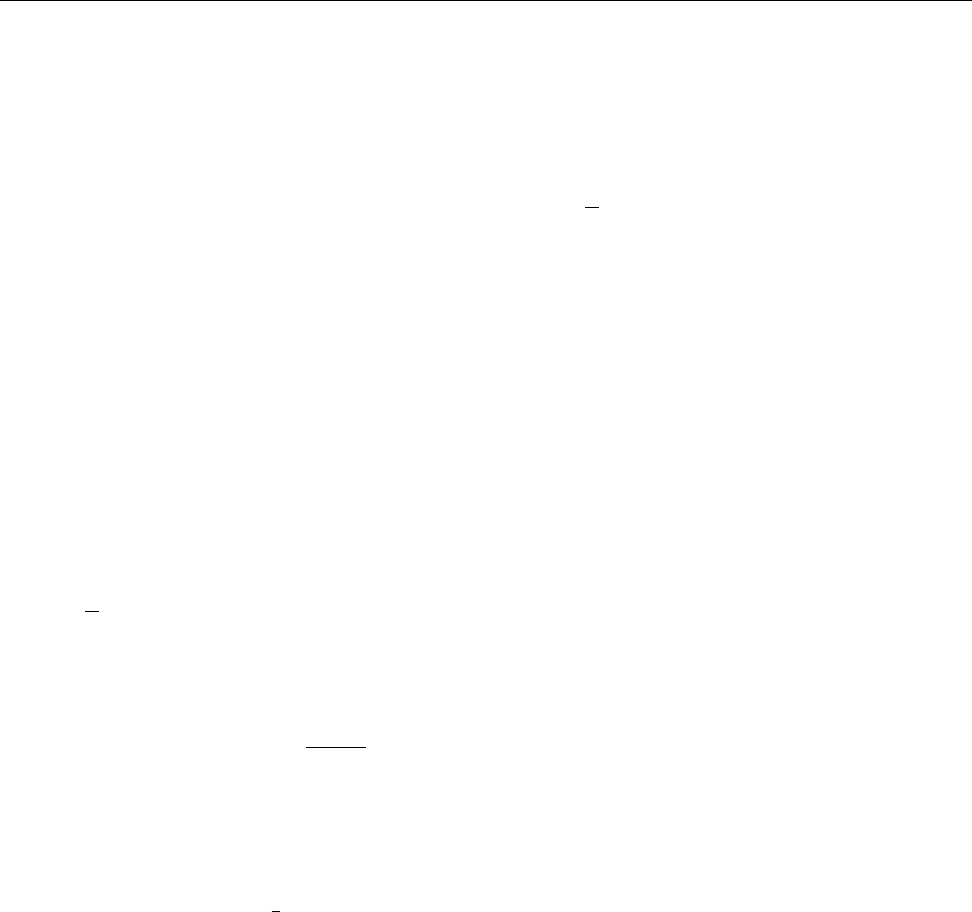
Figure 1: Example of a weakly convex function. The left figure is the original weakly convex function. By adding
an appropriate quadratic to the weakly convex function (left), we get the convex function on the right.
exploit the problem structure (finite-sum, composite)
in the convex case, and benefit from this feature when
dealing with a new problem with unknown convexity;
remarkably,
M
does not need to have any convergence
guarantee for nonconvex problems to be used in 4WD-
Catalyst, which is the main originality of our work.
Two-step subproblems.
In each iteration, 4WD-
Catalyst forms subproblems of the form
min
x
f
κ
(x; y) := f(x) +
κ
2
kx − yk
2
. (P)
We call
y
the prox-center and any minimizer of the
subproblem a proximal point. The perturbed function
f
κ
(
x
;
y
) satisfies the important property:
f
κ
(
·
;
y
) is
(
κ − ρ
)-strongly convex for any
κ > ρ
. The addition of
the quadratic to
f
makes the subproblem more “con-
vex”. That is, when
f
is nonconvex, a large enough
κ
yields convex subproblems; even when
f
is convex, the
quadratic perturbation improves conditioning.
We now describe the
k
’th iteration of Algorithm 1. To
this end, suppose we have available iterates
x
k−1
and
v
k−1
. At the center of our Algorithm 1 are two main
sequences of iterates (
¯x
k
)
k
and (
˜x
k
)
k
, obtained from
approximately solving two subproblems of the form
P
.
1. Proximal point step.
We first perform an inexact
proximal point step with prox-center x
k−1
:
¯x
k
≈ argmin
x
f
κ
(x; x
k−1
) [Proximal-point step] (2)
2. Accelerated proximal point step.
Then we
build the next prox-center y
k
as the combination
y
k
= α
k
v
k−1
+ (1 − α
k
)x
k−1
. (3)
Next we use
y
k
as a prox-center and update the next
extrapolation term:
˜x
k
≈ argmin
x
f
κ
(x; y
k
) [Acc. prox.-point step] (4)
v
k
= x
k−1
+
1
α
k
(˜x
k
− x
k−1
) [Extrapolation] (5)
where
α
k+1
∈
(0
,
1) is a sequence of coefficients sat-
isfying
(1 − α
k+1
)/α
2
k+1
= 1/α
2
k
. Essentially, the se-
quences (
α
k
)
k
,
(
y
k
)
k
,
(
v
k
)
k
are built upon the extrapo-
lation principles of [26].
Algorithm 1 4WD-Catalyst
input
Fix a point
x
0
∈ dom f
, real numbers
κ
0
, κ
cvx
>
0 and T, S > 0, and an opt. method M.
initialization: α
1
= 1, v
0
= x
0
.
repeat for k = 1, 2, . . .
1. Compute
(¯x
k
, κ
k
) = Auto-adapt (x
k−1
, κ
k−1
, T ).
2.
Compute
y
k
=
α
k
v
k−1
+ (1
− α
k
)
x
k−1
and
apply S log(k + 1) iterations of M to find
˜x
k
≈ argmin
x∈R
p
f
κ
cvx
(x, y
k
). (6)
3. Update v
k
and α
k+1
by
v
k
= x
k−1
+
1
α
k
(˜x
k
− x
k−1
)
and α
k+1
=
p
α
4
k
+ 4α
2
k
− α
2
k
2
.
4.
Choose
x
k
to be any point satisfying
f
(
x
k
) =
min{f(¯x
k
), f (˜x
k
)}.
until the stopping criterion dist
0, ∂f (¯x
k
)
< ε
Picking the best.
At the end of iteration
k
, we
have two iterates, resp.
¯x
k
and
˜x
k
. Following [
12
],
we simply choose the best of the two in terms of their
objective values, that is we choose
x
k
such that
f
(
x
k
)
≤
min {f (¯x
k
), f (˜x
k
)}.
The proposed scheme blends the two steps in a syner-
gistic way, allowing us to recover the near-optimal rates
of convergence in both worlds: convex and nonconvex.
Intuitively, when
¯x
k
is chosen, it means that Nesterov’s
extrapolation step “fails” to accelerate convergence.
We present now our strategy to set the parameters of
4WD-Catalyst in order to a) automatically adapt to
the unknown weak convexity constant
ρ
; b) enjoy near-
optimal rates in both convex and nonconvex settings.
Courtney Paquette, Hongzhou Lin, Dmitriy Drusvyatskiy, Julien Mairal, Zaid Harchaoui
Algorithm 2 Auto-adapt (x, κ, T )
input x ∈ R
p
, method M, κ > 0, num. iterations T .
Repeat
Run
T
iterations of
M
initializing from
z
0
=
x
, or
z
0
=
prox
ηψ
(
x − η∇f
0
(
x
;
y
)) with
η
=
1
/
(
L
+
κ
) for composite objectives
f
=
f
0
+
ψ
with
L-smooth function f
0
, to obtain
z
T
≈ argmin
z∈R
p
f
κ
(z; x).
If f
κ
(z
T
; x) ≤ f
κ
(x; x)
and dist(0, ∂f
κ
(z
T
; x)) ≤ κ kz
T
− xk,
then go to output.
else repeat with κ → 2κ.
output (z
T
, κ).
4 Parameter Choices and Adaptation
When
κ
is large enough, the subproblems become
strongly convex; thus globally solvable. Henceforth,
we will assume that
M
satisfies the following natural
linear convergence assumption.
Linear convergence of M for strongly-convex
problems.
We assume that for any
κ > ρ
, there
exist
A
κ
≥
0 and
τ
κ
in (0
,
1) so that the following hold:
1.
For any prox-center
y
in
R
p
, define
f
∗
κ
(
y
) =
min
z
f
κ
(
z, y
). For any initial point
z
0
in
R
p
, the
iterates
{z
t
}
t≥1
generated by
M
on the problem
min
z
f
κ
(z; y) satisfy
dist
2
(0, ∂f
κ
(z
t
; y)) ≤ A
κ
(1−τ
κ
)
t
f
κ
(z
0
; y)−f
∗
κ
(y)
.
(7)
2.
The rates
τ
κ
and constants
A
κ
are increasing in
κ
.
When the function is strongly convex, the first condition
is equivalent to the error
f
κ
(
z
k
;
y
)
− f
∗
κ
(
y
) decreasing
geometrically to zero (convergence in sub-gradient norm
and function values are equivalent in this case). If
the method is randomized, we allow
(7)
to hold in
expectation; see Sec. 5.1 in [
28
]. All algorithms of
interest, (e.g., gradient descent, SVRG, SAGA) satisfy
these properties.
Adaptation to weak convexity and choice of T .
Recall that we add a quadratic to
f
to make each sub-
problem convex. Thus, we should set
κ > ρ
, if
ρ
were
known. On the other other hand, we do not want
κ
too
large, as that may slow down the overall algorithm. In
any case, it is difficult to have an accurate estimate of
ρ
for machine learning problems such as neural networks.
Thus, we propose a procedure described in Algorithm 2
to automatically adapt to ρ.
The idea is to fix in advance a number of iterations
T
,
let
M
run on the subproblem for
T
iterations, output
the point
z
T
, and check if a sufficient decrease occurs.
We show that if we set
T
=
˜
O
(
τ
−1
L
), where
˜
O
hides
logarithmic dependencies in
L
and
A
L
, where
L
is the
Lipschitz constant of the smooth part of
f
; then, if
the subproblem were convex, the following conditions
would be guaranteed:
1. Descent condition: f
κ
(z
T
; x) ≤ f
κ
(x; x);
2. Adaptive stationary condition:
dist
0, ∂f
κ
(z
T
; x)
≤ κ kz
T
− xk.
Thus, if either condition is not satisfied, then the sub-
problem is deemed not convex and we double
κ
and
repeat. The procedure yields an estimate of
ρ
in a
logarithmic number of increases; see [28][Lemma D.3].
The descent condition is a sanity check, which ensures
the iterates generated by the algorithm always decrease
the function value. Without it, the stationarity con-
dition alone is insufficient because of the existence of
local maxima in nonconvex problems.
The adaptive stationarity property controls the in-
exactness of the subproblem in terms of subgradi-
ent norm. In a nonconvex setting, the subgradient
norm is convenient, since we cannot access
f
κ
(
z
T
, x
)
−
f
∗
κ
(
x
). Furthermore, unlike the stationary condition
dist
0
, ∂f
κ
(
z
T
;
x
)
< ε
, where an accuracy
ε
is pre-
defined, the adaptive stationarity condition depends
on the iterate
z
T
. This turns out to be essential in
deriving the global complexity. Sec. 4 in [
28
] contains
more details.
Relative stationarity and predefining S.
One of
the main differences of our approach with the Catalyst
algorithm of [
22
] is to use a pre-defined number of
iterations,
T
and
S
, for solving the subproblems. We
introduce
κ
cvx
, a
M
dependent smoothing parameter,
and set it in the same way as the smoothing parameter
in [
22
]. The automatic acceleration of our algorithm
when the problem is convex is due to extrapolation
steps in Step 2-3 of Algo. 1. We show that if we set
S
=
˜
O
τ
−1
κ
cvx
, where
˜
O
hides logarithmic dependencies
in
L
,
κ
κ
, and
A
κ
cvx
, then we can be sure that in the
convex setting we have
dist
0, ∂f
κ
cvx
(˜x
k
; y
k
)
<
κ
cvx
k + 1
k˜x
k
− y
k
k. (8)
This relative stationarity of
˜x
k
, including the choice
of
κ
cvx
, shall be crucial to guarantee that the scheme
accelerates in the convex setting. An additional
k
+
1 factor appears compared to the previous adaptive
stationary condition because we need higher accuracy
for solving the subproblem to achieve the accelerated
rate in 1
/
√
ε
. Therefore, an extra
log
(
k
+ 1) factor of
iterations is needed; see Sec. 4 and Sec. 5 in [28].
We shall see, in Sec. 6, that our strategy consisting in
predefining T and S works quite well in practice.
Catalyst for Gradient-based Nonconvex Optimization
The worst-case theoretical bounds we derive are con-
servative; we observe in our experiments that one may
choose
T
and
S
significantly smaller than the theory
suggests and still retain the stopping criteria.
5 Global Convergence and
Applications to Existing Algorithms
After presenting the main mechanisms of our algoritm,
we now present its worst-case complexity, which takes
into account the cost of approximately solving the
subproblems (2) and (4).
Theorem 5.1
(Global complexity bounds for 4WD–
Catalyst)
.
Choose
T
=
˜
O
(
τ
−1
L
) and
S
=
˜
O
(
τ
−1
κ
cvx
) (see
Theorem 5.6 in [28]). Then the following are true.
1.
Algorithm 1 generates a point
x
satisfying
dist
0, ∂f (x)
≤ ε after at most
˜
O
τ
−1
L
+ τ
−1
κ
cvx
·
L(f(x
0
) − f
∗
)
ε
2
iterations of the method M.
2.
If
f
is convex, Algorithm 1 generates a point
x
satisfying dist
0, ∂f (x)
≤ ε after at most
˜
O
τ
−1
L
+ τ
−1
κ
cvx
·
L
1/3
κ
cvx
kx
∗
− x
0
k
2
1/3
ε
2/3
!
iterations of the method M.
3.
If
f
is convex, Algorithm 1 generates a point
x
satisfying f (x) − f
∗
≤ ε after at most
˜
O
τ
−1
L
+ τ
−1
κ
cvx
·
p
κ
cvx
kx
∗
− x
0
k
2
√
ε
!
iterations of the method M.
Here
˜
O
hides universal constants and logarith-
mic dependencies in
A
κ
cvx
,
A
L
,
κ
0
,
κ
cvx
,
ε
, and
kx
∗
− x
0
k
2
.
If
M
is a first order method, the convergence guarantee
in the convex setting is near-optimal, up to logarithmic
factors, when compared to
O
(1
/
√
ε
) [
22
,
33
]. In the
nonconvex setting, our approach matches, up to loga-
rithmic factors, the best known rate for this class of
functions, namely
O
(1
/ε
2
) [
5
,
7
,
8
]. Moreover, our rates
dependence on the dimension and Lipschitz constant
equals, up to log factors, the best known dependencies
in both the convex and nonconvex setting. These loga-
rithmic factors may be the price we pay for having a
generic algorithm.
Choice of κ
cvx
.
The parameter
κ
cvx
drives the con-
vergence rate of 4WD-Catalyst in the convex setting.
To determine
κ
cvx
, we compute the global complexity
of our scheme as if
ρ
= 0, hence using the same reason-
ing as [
22
]. The rule consists in maximizing the ratio
τ
κ
/
√
κ
. Then, the choice of
κ
0
is independent of
M
;
it is an initial lower estimate for the weak convexity
constant
ρ
. We provide a detailed derivation of all
the variables for each of the considered algorithms in
Section 6 of [28].
5.1 Applications
We now compare the guarantees obtained before and
after applying 4WD-Catalyst to some specific optimiza-
tion methods
M
: full gradient, SAGA, and SVRG (see
[
28
] for randomized coordinate descent). In the convex
setting, the accuracy is stated in terms of optimization
error,
f
(
x
)
− f
?
≤ ε
and in the nonconvex setting, in
terms of stationarity condition dist(0, ∂f(x)) < ε.
Full gradient method.
First, we consider the sim-
plest case of applying our method to the full gradi-
ent method (FG). Here, the optimal choice for
κ
cvx
is
L
. In the convex setting, we get the accelerated rate
O
(
n
p
L/ε log
(1
/ε
)) which is consistent with Nesterov’s
accelerated variant (AFG) up to log factors. In the
nonconvex case, our approach achieves no worse rate
than
O
(
nL/ε
2
log
(1
/ε
)), which is consistent with the
standard gradient descent up to log factors. Under
stronger assumptions, namely
C
2
-smoothness of the
objective, the accelerated algorithm in [
6
] can achieve
the same rate as (AFG) in the convex setting and
O
(
ε
−7/4
log
(1
/ε
)) in the nonconvex setting. Their ap-
proach, however, does not extend to composite setting
nor to stochastic methods. The marginal loss may be
the price for considering a larger class of functions.
Randomized incremental gradient.
We now con-
sider randomized incremental gradient methods such
as SAGA [
9
] and (prox) SVRG [
34
]. Here, the optimal
choice for
κ
cvx
is
O
(
L/n
). Under the convex setting,
we achieve an accelerated rate of
O
(
√
n
p
L/ε log
(1
/ε
)).
Direct applications of SVRG and SAGA have no con-
vergence guarantees in the nonconvex setting, but with
our approach, the resulting algorithm matches the guar-
antees of FG up to log factors, see Table 1 for details.
6 Experiments
We investigate the performance of 4WD-Catalyst on
two standard nonconvex problems in machine learning,
namely on sparse matrix factorization and on training
a simple two-layer neural network.
Comparison with linearly convergent methods.
We report experimental results of 4WD-Catalyst when
applied to the incremental algorithms SVRG [
34
] and
SAGA [9], and consider the following variants:
Courtney Paquette, Hongzhou Lin, Dmitriy Drusvyatskiy, Julien Mairal, Zaid Harchaoui
•
ncvx-SVRG/SAGA [
2
,
30
] with its theoretical step-
size η = 1/Ln
2/3
.
•
a minibatch variant of ncvx-SVRG/SAGA [
2
,
30
]
with batch size b = n
2/3
and stepsize η = 1/L.
•
SVRG/SAGA with large stepsize
η
= 1
/L
. This is
a variant of SVRG/SAGA, whose stepsize is not jus-
tified by theory for nonconvex problems, but which
performs well in practice.
•
4WD-Catalyst SVRG/SAGA with its theoretical
stepsize η = 1/2L.
The algorithm SVRG (resp. SAGA) was originally
designed for minimizing convex objectives. The non-
convex version was developed in [
2
,
30
], using a signif-
icantly smaller stepsize
η
= 1
/Ln
2/3
. Following [
30
],
we also include in the comparison a heuristic variant
that uses a large stepsize
η
= 1
/L
, where no theoretical
guarantee is available for nonconvex objectives. 4WD-
Catalyst SVRG and 4WD-Catalyst SAGA use a similar
stepsize, but the Catalyst mechanism makes this choice
theoretically grounded.
Comparison with popular stochastic algorithms.
We also include as baselines three popular stochastic
algorithms: stochastic gradient descent (SGD), Ada-
Grad [11], and Adam [17].
• SGD with constant stepsize.
• AdaGrad [11] with stepsize η = 0.1 or 0.01.
•
Adam [
17
] with stepsize
α
= 0
.
01 or 0
.
001,
β
1
= 0
.
9
and β
2
= 0.999.
The stepsize (learning rate) of these algorithms are
manually tuned to output the best performance. Note
that none of them, SGD, AdaGrad [
11
] or Adam [
17
]
enjoys linear convergence when the problem is strongly
convex. Therefore, we do not apply 4WD-Catalyst to
these algorithms. SGD is used in both experiments,
whereas AdaGrad and Adam are used only on the
neural network experiments since it is unclear how to
apply them to a nonsmooth objective.
Parameter settings.
We start from an initial esti-
mate of the Lipschitz constant
L
and use the theoret-
ically recommended parameters
κ
0
=
κ
cvx
= 2
L/n
in
4WD-Catalyst. We set the number of inner iterations
T
=
S
=
n
in all experiments which means making at
most one pass over the data to solve each sub-problem.
Moreover, the
log
(
k
) dependency dictated by the the-
ory is dropped while solving the subproblem in (6).
These choices turn out to be justified a posteriori, as
both SVRG and SAGA have a much better convergence
rate in practice than the theoretical rate derived from
a worst-case analysis. Indeed, in all experiments, one
pass over the data to solve each sub-problem was found
to be enough to guarantee sufficient descent. We focus
in the main text on the results for SVRG and relegate
results for SAGA and details about experiments to
Section 7 of [28].
Sparse matrix factorization a.k.a. dictionary
learning.
Dictionary learning consists of represent-
ing a dataset
X
= [
x
1
, ··· , x
n
]
∈ R
m×n
as a product
X ≈ DA
, where
D
in
R
m×p
is called a dictionary, and
A
in
R
p×n
is a sparse matrix. The classical nonconvex
formulation [see
24
] can be reformulated as the equiv-
alent finite-sum problem
min
D∈C
1
n
P
n
i=1
f
i
(
D
) with
f
i
(D) := min
α∈R
p
1
2
kx
i
− Dαk
2
2
+ ψ(α). (9)
ψ
is a sparsity-inducing regularization and
C
is chosen
as the set of matrices whose columns are in the
`
2
-ball;
see Sec. 7 in [
28
]. We consider elastic-net regularization
ψ
(
α
) =
µ
2
kαk
2
+
λkαk
1
of [
35
], which has a sparsity-
inducing effect, and report the corresponding results in
Figure 2. We learn a dictionary in
R
m×p
with
p
= 256
elements on a set of whitened normalized image patches
of size
m
= 8
×
8. Parameters are set to be as in [
24
]—
that is, a small value
µ
=1
e−
5, and
λ
=0
.
25, leading to
sparse matrices
A
(on average
≈
4 non-zero coefficients
per column of A).
Neural networks.
We consider simple binary classi-
fication problems for learning neural networks. Assume
that we are given a training set
{a
i
, b
i
}
n
i=1
, where the
variables
b
i
in
{−
1
,
+1
}
represent class labels, and
a
i
in
R
p
are feature vectors. The estimator of a la-
bel class is now given by a two-layer neural network
ˆ
b
=
sign
(
w
>
2
σ
(
W
>
1
a
)), where
W
1
in
R
p×d
represents
the weights of a hidden layer with
d
neurons,
w
2
in
R
d
carries the weight of the network’s second layer, and
σ
(
u
) =
log
(1 +
e
u
) is a non-linear function, applied
point-wise to its arguments. We use the logistic loss to
fit the estimators to the true labels and report experi-
mental results on the two datasets alpha and covtype.
The weights of the network are randomly initialized
and we fix the number of hidden neurons to d = 100.
Computational cost.
For SGD, AdaGrad, Adam,
and all the ncvx-SVRG variants, one iteration corre-
sponds to one pass over the data in the plots. For 4WD-
Catalyst-SVRG, it solves two sub-problems per itera-
tion, which doubles the cost per iteration comparing
to the other algorithms. It is worth remarking that
every time acceleration occurs in our experiments,
˜x
k
is almost always preferred to
¯x
k
in step 4 of 4WD-
Catalyst, suggesting that half of the computations may
be reduced when running 4WD-Catalyst-SVRG.
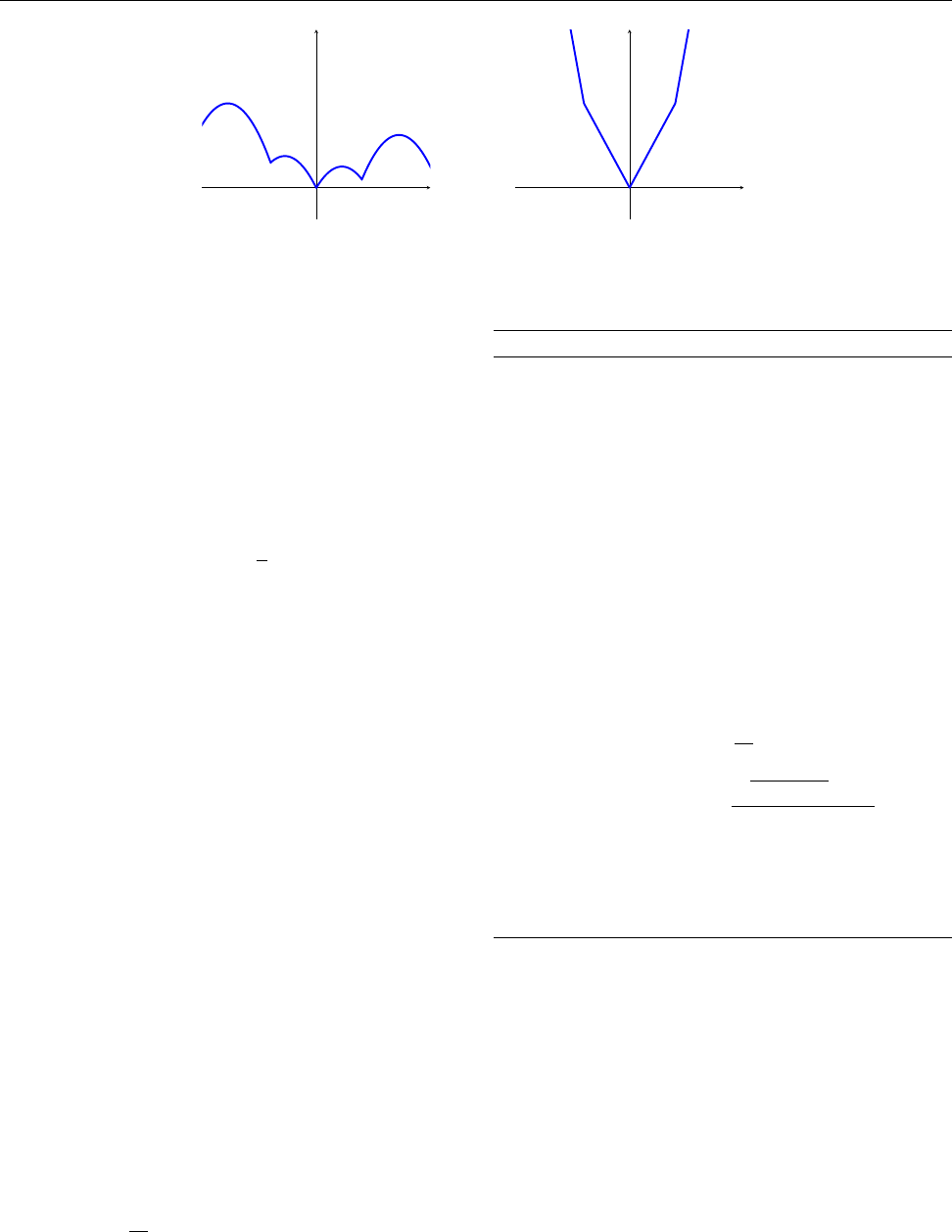
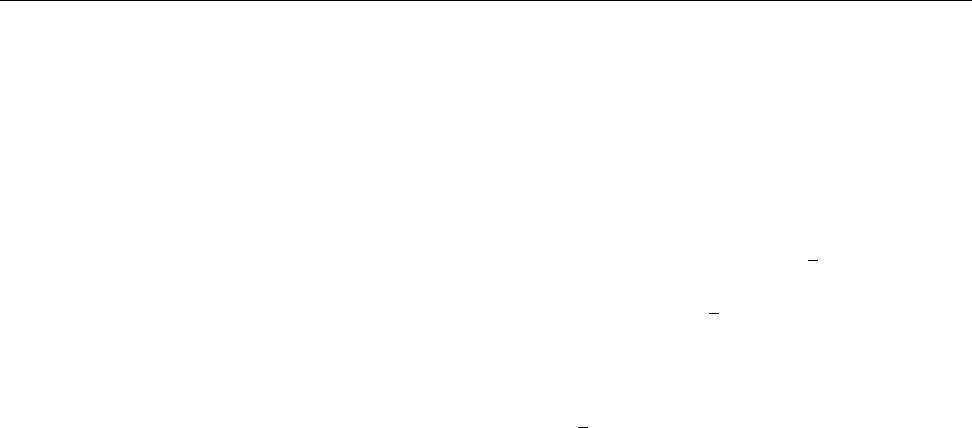
Experimental conclusions.
In the matrix factor-
ization experiments in Fig. 2, 4WD-Catalyst-SVRG
was always competitive, with a similar performance
to the heuristic SVRG-
η
= 1
/L
in two cases out of
three, while being significantly better as soon as the
Catalyst for Gradient-based Nonconvex Optimization
0 20 40 60 80 100
Number of iterations
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
0.52
0.54
0.56
Function value
Matrix factorization, n=1000
sgd
ncvx svrg th. η
svrg η = 1/L
ncvx svrg minibatch th. η
4wd-catalyst svrg
0 20 40 60 80 100
Number of iterations
0.48
0.49
0.5
0.51
0.52
0.53
0.54
0.55
0.56
0.57
0.58
Function value
Matrix factorization, n=10000
sgd
ncvx svrg th. η
svrg η = 1/L
ncvx svrg minibatch th. η
4wd-catalyst svrg
0 20 40 60 80 100
Number of iterations
0.46
0.465
0.47
0.475
0.48
0.485
0.49
0.495
0.5
0.505
0.51
Function value
Matrix factorization, n=100000
sgd
ncvx svrg th. η
svrg η = 1/L
ncvx svrg minibatch th. η
4wd-catalyst svrg
0 20 40 60 80 100
Number of iterations
-5
-4.5
-4
-3.5
-3
-2.5
-2
Log of Subgradient Norm
Matrix factorization, n=1000
sgd
ncvx svrg th. η
svrg η = 1/L
ncvx svrg minibatch th. η
4wd-catalyst svrg
0 20 40 60 80 100
Number of iterations
-4.5
-4
-3.5
-3
-2.5
-2
Log of Subgradient Norm
Matrix factorization, n=10000
sgd
ncvx svrg th. η
svrg η = 1/L
ncvx svrg minibatch th. η
4wd-catalyst svrg
0 20 40 60 80 100
Number of iterations
-4.2
-4
-3.8
-3.6
-3.4
-3.2
-3
-2.8
-2.6
Log of Subgradient Norm
Matrix factorization, n=100000
sgd
ncvx svrg th. η
svrg η = 1/L
ncvx svrg minibatch th. η
4wd-catalyst svrg
Figure 2: Dictionary learning experiments. We plot the function value (top) and the subgradient norm (bottom).
From left to right, we vary the size of the dataset from n = 1 000 to n = 100 000
0 50 100 150 200 250
Number of iterations
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Function value
Neural network, dataset=alpha, n=1000
sgd
adagrad
adam
svrg η = 1/L
4wd-catalyst svrg
0 50 100 150 200 250
Number of iterations
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
Function value
Neural network, dataset=alpha, n=10000
sgd
adagrad
adam
svrg η = 1/L
4wd-catalyst svrg
0 50 100 150 200 250
Number of iterations
0.1
0.2
0.3
0.4
0.5
0.6
Function value
Neural network, dataset=alpha, n=100000
sgd
adagrad
adam
svrg η = 1/L
4wd-catalyst svrg
0 50 100 150 200 250
Number of iterations
-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
Log of Subgradient Norm
Neural network, dataset=alpha, n=1000
sgd
adagrad
adam
svrg η = 1/L
4wd-catalyst svrg
0 50 100 150 200 250
Number of iterations
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
Log of Subgradient Norm
Neural network, dataset=alpha, n=10000
sgd
adagrad
adam
svrg η = 1/L
4wd-catalyst svrg
0 50 100 150 200 250
Number of iterations
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
Log of Subgradient Norm
Neural network, dataset=alpha, n=100000
sgd
adagrad
adam
svrg η = 1/L
4wd-catalyst svrg
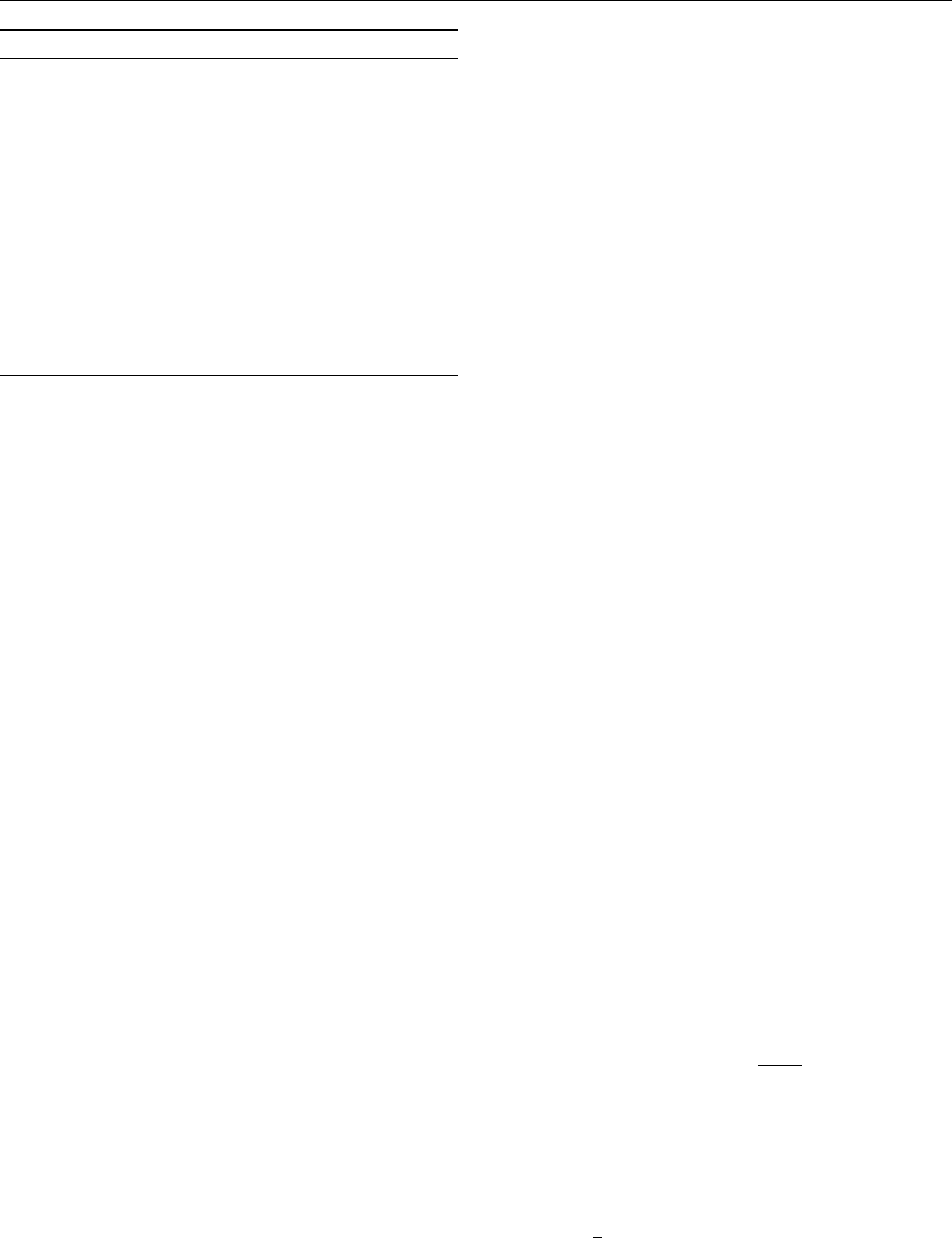
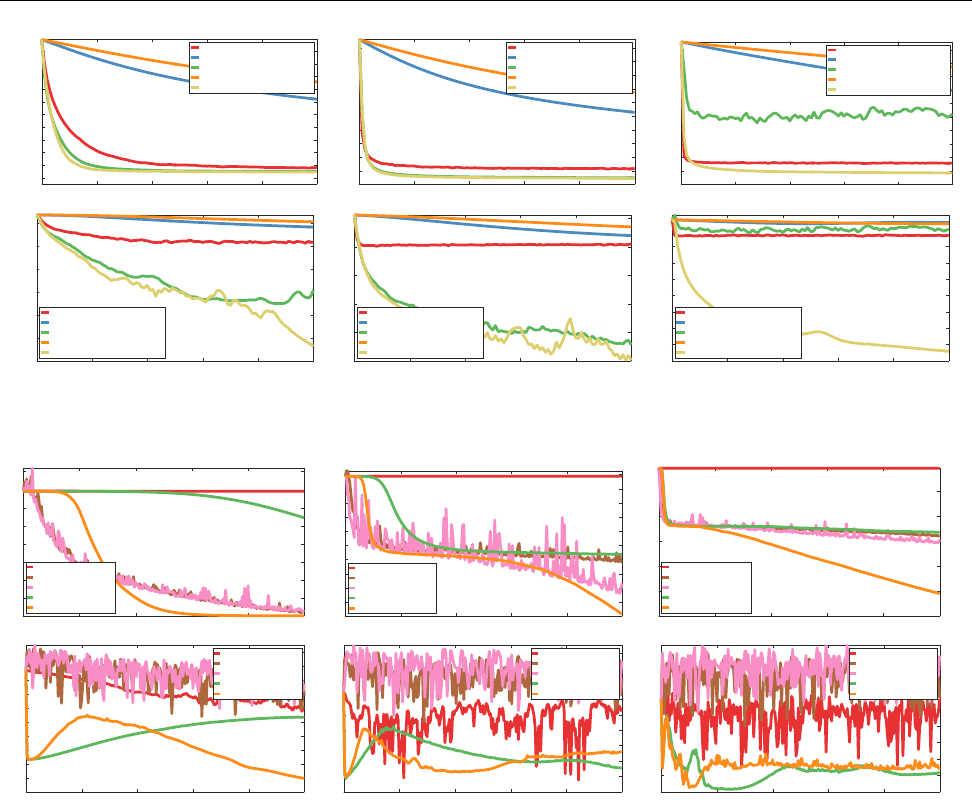
Figure 3: Neural network experiments. Same experimental setup as in Fig. 2. From left to right, we vary the size
of the dataset’s subset from n = 1 000 to n = 100 000.
amount of data n was large enough. As expected, the
variants of SVRG with theoretical stepsizes have slow
convergence, but exhibit a stable behavior compared
to SVRG-
η
= 1
/L
. This confirms the ability of 4WD-
Catalyst-SVRG to adapt to nonconvex terrains. Simi-
lar conclusions hold when applying 4WD-Catalyst to
SAGA; see Sec. 7 in [28].
In the neural network experiments, we observe
that 4WD-Catalyst-SVRG converges much faster over-
all in terms of objective values than other algorithms.
Yet Adam and AdaGrad often perform well during the
first iterations, they oscillate a lot, which is a behavior
commonly observed. In contrast, 4WD-Catalyst-SVRG
always decreases and keeps decreasing while other algo-
rithms tend to stabilize, hence achieving significantly
lower objective values.
More interestingly, as the algorithm proceeds, the sub-
gradient norm may increase at some point and then
decrease, while the function value keeps decreasing.
This suggests that the extrapolation step, or the Auto-
adapt procedure, is helpful to escape bad stationary
points, e.g., saddle-points. We leave the study of this
particular phenomenon as a potential direction for fu-
ture work.
Acknowledgements
The authors would like to thank J. Duchi for fruit-
ful discussions. CP was partially supported by the
LMB program of CIFAR. HL and JM were supported
by ERC grant SOLARIS (# 714381) and ANR grant
MACARON (ANR-14-CE23-0003-01). DD was sup-
ported by AFOSR YIP FA9550-15-1-0237, NSF DMS
1651851, and CCF 1740551 awards. ZH was supported
by NSF Grant CCF-1740551, the “Learning in Ma-
chines and Brains” program of CIFAR, and a Criteo
Faculty Research Award. This work was performed
while HL was at Inria.

Courtney Paquette, Hongzhou Lin, Dmitriy Drusvyatskiy, Julien Mairal, Zaid Harchaoui
References
[1]
Z. Allen-Zhu. Natasha: Faster non-convex stochas-
tic optimization via strongly non-convex parame-
ter. In International conference on machine learn-
ing (ICML), 2017.
[2]
Z. Allen-Zhu and E. Hazan. Variance reduction for
faster non-convex optimization. In International
conference on machine learning (ICML), 2016.
[3]
J. M. Borwein and A. S. Lewis. Convex analysis
and nonlinear optimization: theory and examples.
Springer Verlag, 2006.
[4]
Y. Carmon, J. C. Duchi, O. Hinder, and A. Sidford.
Accelerated methods for non-convex optimization.
preprint arXiv:1611.00756, 2016.
[5]
Y. Carmon, J. C. Duchi, O. Hinder, and A. Sid-
ford. Lower bounds for finding stationary points
I. preprint arXiv:1710.11606, 2017.
[6]
Y. Carmon, O. Hinder, J. C. Duchi, and A. Sid-
ford. “convex until proven guilty”: Dimension-free
acceleration of gradient descent on non-convex
functions. In International conference on machine
learning (ICML), 2017.
[7]
C. Cartis, N. I. M. Gould, and P. L. Toint. On
the complexity of steepest descent, newton’s and
regularized newton’s methods for nonconvex un-
constrained optimization problems. SIAM Journal
on Optimization, 20(6):2833–2852, 2010.
[8]
C. Cartis, N.I.M. Gould, and P. L. Toint. On the
complexity of finding first-order critical points in
constrained nonlinear optimization. Mathematical
Programming, Series A, 144:93–106, 2014.
[9]
A. J. Defazio, F. Bach, and S. Lacoste-Julien.
SAGA: A fast incremental gradient method with
support for non-strongly convex composite objec-
tives. In Advances in Neural Information Process-
ing Systems (NIPS), 2014.
[10]
D. Drusvyatskiy and C. Paquette. Efficiency of
minimizing compositions of convex functions and
smooth maps. preprint arXiv:1605.00125, 2016.
[11]
J. C. Duchi, E. Hazan, and Y. Singer. Adap-
tive subgradient methods for online learning and
stochastic optimization. Journal of Machine
Learning Research (JMLR), 12:2121–2159, 2011.
[12]
S. Ghadimi and G. Lan. Accelerated gradient
methods for nonconvex nonlinear and stochastic
programming. Mathematical Programming, 156(1-
2, Ser. A):59–99, 2016.
[13]
S. Ghadimi, G. Lan, and H. Zhang. Generalized
uniformly optimal methods for nonlinear program-
ming. preprint arXiv:1508.07384, 2015.
[14]
T. Hastie, R. Tibshirani, and M. Wainwright. Sta-
tistical learning with sparsity: the Lasso and gen-
eralizations. CRC Press, 2015.
[15]
C. Jin, P. Netrapalli, and M. I. Jordan. Accelerated
gradient descent escapes saddle points faster than
gradient descent. preprint arXiv:1711.10456, 2017.
[16]
R. Johnson and T. Zhang. Accelerating stochastic
gradient descent using predictive variance reduc-
tion. In Advances in Neural Information Process-
ing Systems (NIPS), 2013.
[17]
Diederik P Kingma and Jimmy Ba. Adam: A
method for stochastic optimization. International
Conference on Learning Representations (ICLR),
2015.
[18]
G. Lan and Y. Zhou. An optimal randomized
incremental gradient method. Mathematical Pro-
gramming, Series A, pages 1–38, 2017.
[19]
L. Lei and M. I. Jordan. Less than a single
pass: stochastically controlled stochastic gradient
method. In Conference on Artificial Intelligence
and Statistics (AISTATS), 2017.
[20]
L. Lei, C. Ju, J. Chen, and M. I. Jordan. Non-
convex finite-sum optimization via SCSG meth-
ods. In Advances in Neural Information Processing
Systems (NIPS), 2017.
[21]
H. Li and Z. Lin. Accelerated proximal gradient
methods for nonconvex programming. In Advances
in Neural Information Processing Systems (NIPS).
2015.
[22]
H. Lin, J. Mairal, and Z. Harchaoui. A universal
catalyst for first-order optimization. In Advances
in Neural Information Processing Systems (NIPS),
2015.
[23]
J. Mairal. Incremental majorization-minimization
optimization with application to large-scale ma-
chine learning. SIAM Journal on Optimization,
25(2):829–855, 2015.
[24]
J. Mairal, F. Bach, and J. Ponce. Sparse modeling
for image and vision processing. Foundations and
Trends in Computer Graphics and Vision, 8(2-
3):85–283, 2014.
[25]
Y. Nesterov. A method of solving a convex pro-
gramming problem with convergence rate
O
(1/
k
2
).
Soviet Mathematics Doklady, 27(2):372–376, 1983.
[26]
Y. Nesterov. Introductory lectures on convex opti-
mization: a basic course. Springer, 2004.
[27]
M. O’Neill and S. J. Wright. Behavior of accel-
erated gradient methods near critical points of
nonconvex problems. preprint arXiv:1706.07993,
2017.

Catalyst for Gradient-based Nonconvex Optimization
[28]
C. Paquette, H. Lin, D. Drusvyatskiy, J. Mairal,
and Z. Harchaoui. Catalyst acceleration for
gradient-based non-convex optimization. preprint
arXiv:1703.10993, 2017.
[29]
S. J. Reddi, A. Hefny, S. Sra, B. Poczos, and
A. Smola. Stochastic variance reduction for non-
convex optimization. In International conference
on machine learning (ICML), 2016.
[30]
S. J. Reddi, S. Sra, B. Poczos, and A. J. Smola.
Proximal stochastic methods for nonsmooth non-
convex finite-sum optimization. In Advances in
Neural Information Processing Systems (NIPS),
2016.
[31]
R. T. Rockafellar and R. J.-B. Wets. Variational
analysis, volume 317 of Grundlehren der Mathema-
tischen Wissenschaften [Fundamental Principles
of Mathematical Sciences]. Springer-Verlag, Berlin,
1998.
[32]
M. Schmidt, N. Le Roux, and F. Bach. Minimizing
finite sums with the stochastic average gradient.
Mathematical Programming, 162(1):83–112, 2017.
[33]
B. E. Woodworth and N. Srebro. Tight complexity
bounds for optimizing composite objectives. In Ad-
vances in Neural Information Processing Systems
(NIPS). 2016.
[34]
L. Xiao and T. Zhang. A proximal stochastic gra-
dient method with progressive variance reduction.
SIAM Journal on Optimization, 24(4):2057–2075,
2014.
[35]
H. Zou and T. Hastie. Regularization and variable
selection via the elastic net. Journal of the Royal
Statistical Society: Series B (Statistical Methodol-
ogy), 67(2):301–320, 2005.
