
Journal of Machine Learning Research 18 (2018) 1-54 Submitted 12/17; Revised 12/17; Published 4/18
Catalyst Acceleration for First-order Convex Optimization:
from Theory to Practice
Massachusetts Institute of Technology
Computer Science and Artificial Intelligence Laboratory
Cambridge, MA 02139, USA
Univ. Grenoble Alpes, Inria, CNRS, Grenoble INP
∗
, LJK,
Grenoble, 38000, France
University of Washington
Department of Statistics
Seattle, WA 98195, USA
Editor: L´eon Bottou
Abstract
We introduce a generic scheme for accelerating gradient-based optimization methods in
the sense of Nesterov. The approach, called Catalyst, builds upon the inexact acceler-
ated proximal point algorithm for minimizing a convex objective function, and consists of
approximately solving a sequence of well-chosen auxiliary problems, leading to faster con-
vergence. One of the keys to achieve acceleration in theory and in practice is to solve these
sub-problems with appropriate accuracy by using the right stopping criterion and the right
warm-start strategy. We give practical guidelines to use Catalyst and present a compre-
hensive analysis of its global complexity. We show that Catalyst applies to a large class of
algorithms, including gradient descent, block coordinate descent, incremental algorithms
such as SAG, SAGA, SDCA, SVRG, MISO/Finito, and their proximal variants. For all of
these methods, we establish faster rates using the Catalyst acceleration, for strongly convex
and non-strongly convex objectives. We conclude with extensive experiments showing that
acceleration is useful in practice, especially for ill-conditioned problems.
Keywords: convex optimization, first-order methods, large-scale machine learning
1. Introduction
A large number of machine learning and signal processing problems are formulated as the
minimization of a convex objective function:
min
x∈R
p
n
f(x) , f
0
(x) + ψ(x)
o
, (1)
where f
0
is convex and L-smooth, and ψ is convex but may not be differentiable. We call
a function L-smooth when it is differentiable and its gradient is L-Lipschitz continuous.
∗. Institute of Engineering Univ. Grenoble Alpes
c
2018 Hongzhou Lin, Julien Mairal and Zaid Harchaoui.
License: CC-BY 4.0, see https://creativecommons.org/licenses/by/4.0/. Attribution requirements are provided
at http://jmlr.org/papers/v18/17-748.html.

Lin, Mairal and Harchaoui
In statistics or machine learning, the variable x may represent model parameters, and
the role of f
0
is to ensure that the estimated parameters fit some observed data. Specifically,
f
0
is often a large sum of functions and (1) is a regularized empirical risk which writes as
min
x∈R
p
(
f(x) ,
1
n
n
X
i=1
f
i
(x) + ψ(x)
)
. (2)
Each term f
i
(x) measures the fit between x and a data point indexed by i, whereas the
function ψ acts as a regularizer; it is typically chosen to be the squared `
2
-norm, which
is smooth, or to be a non-differentiable penalty such as the `
1
-norm or another sparsity-
inducing norm (Bach et al., 2012).
We present a unified framework allowing one to accelerate gradient-based or first-order
methods, with a particular focus on problems involving large sums of functions. By “ac-
celerating”, we mean generalizing a mechanism invented by Nesterov (1983) that improves
the convergence rate of the gradient descent algorithm. When ψ = 0, gradient descent
steps produce iterates (x
k
)
k≥0
such that f(x
k
) − f
∗
≤ ε in O(1/ε) iterations, where f
∗
denotes the minimum value of f. Furthermore, when the objective f is µ-strongly convex,
the previous iteration-complexity becomes O((L/µ) log(1/ε)), which is proportional to the
condition number L/µ. However, these rates were shown to be suboptimal for the class
of first-order methods, and a simple strategy of taking the gradient step at a well-chosen
point different from x
k
yields the optimal complexity—O(1/
√
ε) for the convex case and
O(
p
L/µ log(1/ε)) for the µ-strongly convex one (Nesterov, 1983). Later, this acceleration
technique was extended to deal with non-differentiable penalties ψ for which the proximal
operator defined below is easy to compute (Beck and Teboulle, 2009; Nesterov, 2013).
prox
ψ
(x) , arg min
z∈R
p
ψ(z) +
1
2
kx − zk
2
, (3)
where k.k denotes the Euclidean norm.
For machine learning problems involving a large sum of n functions, a recent effort has
been devoted to developing fast incremental algorithms such as SAG (Schmidt et al., 2017),
SAGA (Defazio et al., 2014a), SDCA (Shalev-Shwartz and Zhang, 2012), SVRG (Johnson
and Zhang, 2013; Xiao and Zhang, 2014), or MISO/Finito (Mairal, 2015; Defazio et al.,
2014b), which can exploit the particular structure (2). Unlike full gradient approaches,
which require computing and averaging n gradients (1/n)
P
n
i=1
∇f
i
(x) at every iteration,
incremental techniques have a cost per-iteration that is independent of n. The price to pay is
the need to store a moderate amount of information regarding past iterates, but the benefits
may be significant in terms of computational complexity. In order to achieve an ε-accurate
solution for a µ-strongly convex objective, the number of gradient evaluations required by
the methods mentioned above is bounded by O
n +
¯
L
µ
log(
1
ε
)
, where
¯
L is either the
maximum Lipschitz constant across the gradients ∇f
i
, or the average value, depending
on the algorithm variant considered. Unless there is a big mismatch between
¯
L and L
(global Lipschitz constant for the sum of gradients), incremental approaches significantly
outperform the full gradient method, whose complexity in terms of gradient evaluations is
bounded by O
n
L
µ
log(
1
ε
)
.
2

Catalyst for First-order Convex Optimization
Yet, these incremental approaches do not use Nesterov’s extrapolation steps and whether
or not they could be accelerated was an important open question when these methods were
introduced. It was indeed only known to be the case for SDCA (Shalev-Shwartz and Zhang,
2016) for strongly convex objectives. Later, other accelerated incremental algorithms were
proposed such as Katyusha (Allen-Zhu, 2017), or the method of Lan and Zhou (2017).
We give here a positive answer to this open question. By analogy with substances that
increase chemical reaction rates, we call our approach “Catalyst”. Given an optimization
method M as input, Catalyst outputs an accelerated version of it, eventually the same algo-
rithm if the method M is already optimal. The sole requirement on the method in order to
achieve acceleration is that it should have linear convergence rate for strongly convex prob-
lems. This is the case for full gradient methods (Beck and Teboulle, 2009; Nesterov, 2013)
and block coordinate descent methods (Nesterov, 2012; Richt´arik and Tak´aˇc, 2014), which
already have well-known accelerated variants. More importantly, it also applies to the pre-
viou incremental methods, whose complexity is then bounded by
˜
O
n +
p
n
¯
L/µ
log(
1
ε
)
after Catalyst acceleration, where
˜
O hides some logarithmic dependencies on the condition
number
¯
L/µ. This improves upon the non-accelerated variants, when the condition num-
ber is larger than n. Besides, acceleration occurs regardless of the strong convexity of the
objective—that is, even if µ = 0—which brings us to our second achievement.
Some approaches such as MISO, SDCA, or SVRG are only defined for strongly convex
objectives. A classical trick to apply them to general convex functions is to add a small
regularization term εkxk
2
in the objective (Shalev-Shwartz and Zhang, 2012). The drawback
of this strategy is that it requires choosing in advance the parameter ε, which is related
to the target accuracy. The approach we present here provides a direct support for non-
strongly convex objectives, thus removing the need of selecting ε beforehand. Moreover, we
can immediately establish a faster rate for the resulting algorithm. Finally, some methods
such as MISO are numerically unstable when they are applied to strongly convex objective
functions with small strong convexity constant. By defining better conditioned auxiliary
subproblems, Catalyst also provides better numerical stability to these methods.
A short version of this paper has been published at the NIPS conference in 2015 (Lin
et al., 2015a); in addition to simpler convergence proofs and more extensive numerical evalu-
ation, we extend the conference paper with a new Moreau-Yosida smoothing interpretation
with significant theoretical and practical consequences as well as new practical stopping
criteria and warm-start strategies.
The paper is structured as follows. We complete this introductory section with some
related work in Section 1.1, and give a short description of the two-loop Catalyst algorithm
in Section 1.2. Then, Section 2 introduces the Moreau-Yosida smoothing and its inexact
variant. In Section 3, we introduce formally the main algorithm, and its convergence analysis
is presented in Section 4. Section 5 is devoted to numerical experiments and Section 6
concludes the paper.
1.1 Related Work
Catalyst can be interpreted as a variant of the proximal point algorithm (Rockafellar, 1976;
G¨uler, 1991), which is a central concept in convex optimization, underlying augmented
Lagrangian approaches, and composite minimization schemes (Bertsekas, 2015; Parikh and
3

Lin, Mairal and Harchaoui
Boyd, 2014). The proximal point algorithm consists of solving (1) by minimizing a sequence
of auxiliary problems involving a quadratic regularization term. In general, these auxiliary
problems cannot be solved with perfect accuracy, and several notions of inexactness were
proposed by G¨uler (1992); He and Yuan (2012) and Salzo and Villa (2012). The Cata-
lyst approach hinges upon (i) an acceleration technique for the proximal point algorithm
originally introduced in the pioneer work of G¨uler (1992); (ii) a more practical inexact-
ness criterion than those proposed in the past.
1
As a result, we are able to control the
rate of convergence for approximately solving the auxiliary problems with an optimization
method M. In turn, we are also able to obtain the computational complexity of the global
procedure, which was not possible with previous analysis (G¨uler, 1992; He and Yuan, 2012;
Salzo and Villa, 2012). When instantiated in different first-order optimization settings, our
analysis yields systematic acceleration.
Beyond G¨uler (1992), several works have inspired this work. In particular, accelerated
SDCA (Shalev-Shwartz and Zhang, 2016) is an instance of an inexact accelerated proximal
point algorithm, even though this was not explicitly stated in the original paper. Catalyst
can be seen as a generalization of their algorithm, originally designed for stochastic dual
coordinate ascent approaches. Yet their proof of convergence relies on different tools than
ours. Specifically, we introduce an approximate sufficient descent condition, which, when
satisfied, grants acceleration to any optimization method, whereas the direct proof of Shalev-
Shwartz and Zhang (2016), in the context of SDCA, does not extend to non-strongly convex
objectives. Another useful methodological contribution was the convergence analysis of
inexact proximal gradient methods of Schmidt et al. (2011) and Devolder et al. (2014).
Finally, similar ideas appeared in the independent work (Frostig et al., 2015). Their results
partially overlap with ours, but the two papers adopt rather different directions. Our
analysis is more general, covering both strongly-convex and non-strongly convex objectives,
and comprises several variants including an almost parameter-free variant.
Then, beyond accelerated SDCA (Shalev-Shwartz and Zhang, 2016), other accelerated
incremental methods have been proposed, such as APCG (Lin et al., 2015b), SDPC (Zhang
and Xiao, 2015), RPDG (Lan and Zhou, 2017), Point-SAGA (Defazio, 2016) and Katyusha
(Allen-Zhu, 2017). Their techniques are algorithm-specific and cannot be directly general-
ized into a unified scheme. However, we should mention that the complexity obtained by
applying Catalyst acceleration to incremental methods matches the optimal bound up to a
logarithmic factor, which may be the price to pay for a generic acceleration scheme.
A related recent line of work has also combined smoothing techniques with outer-loop
algorithms such as Quasi-Newton methods (Themelis et al., 2016; Giselsson and F¨alt, 2016).
Their purpose was not to accelerate existing techniques, but rather to derive new algorithms
for nonsmooth optimization.
To conclude this survey, we mention the broad family of extrapolation methods (Sidi,
2017), which allow one to extrapolate to the limit sequences generated by iterative al-
gorithms for various numerical analysis problems. Scieur et al. (2016) proposed such an
approach for convex optimization problems with smooth and strongly convex objectives.
The approach we present here allows us to obtain global complexity bounds for strongly
1. Note that our inexact criterion was also studied, among others, by Salzo and Villa (2012), but their
analysis led to the conjecture that this criterion was too weak to warrant acceleration. Our analysis
refutes this conjecture.
4
Catalyst for First-order Convex Optimization
Algorithm 1 Catalyst - Overview
input initial estimate x
0
in R
p
, smoothing parameter κ, optimization method M.
1: Initialize y
0
= x
0
.
2: while the desired accuracy is not achieved do
3: Find x
k
using M
x
k
≈ arg min
x∈R
p
n
h
k
(x) , f (x) +
κ
2
kx − y
k−1
k
2
o
. (4)
4: Compute y
k
using an extrapolation step, with β
k
in (0, 1)
y
k
= x
k
+ β
k
(x
k
− x
k−1
).
5: end while
output x
k
(final estimate).
convex and non strongly convex objectives, which can be decomposed into a smooth part
and a non-smooth proximal-friendly part.
1.2 Overview of Catalyst
Before introducing Catalyst precisely in Section 3, we give a quick overview of the algo-
rithm and its main ideas. Catalyst is a generic approach that wraps an algorithm M into
an accelerated one A, in order to achieve the same accuracy as M with reduced computa-
tional complexity. The resulting method A is an inner-outer loop construct, presented in
Algorithm 1, where in the inner loop the method M is called to solve an auxiliary strongly-
convex optimization problem, and where in the outer loop the sequence of iterates produced
by M are extrapolated for faster convergence. There are therefore three main ingredients
in Catalyst: a) a smoothing technique that produces strongly-convex sub-problems; b) an
extrapolation technique to accelerate the convergence; c) a balancing principle to optimally
tune the inner and outer computations.
Smoothing by infimal convolution Catalyst can be used on any algorithm M that
enjoys a linear-convergence guarantee when minimizing strongly-convex objectives. How-
ever the objective at hand may be poorly conditioned or even might not be strongly convex.
In Catalyst, we use M to approximately minimize an auxiliary objective h
k
at iteration k,
defined in (4), which is strongly convex and better conditioned than f. Smoothing by
infimal convolution allows one to build a well-conditioned convex function F from a poorly-
conditioned convex function f (see Section 3 for a refresher on Moreau envelopes). We
shall show in Section 3 that a notion of approximate Moreau envelope allows us to define
precisely the information collected when approximately minimizing the auxiliary objective.
Extrapolation by Nesterov acceleration Catalyst uses an extrapolation scheme “ `a
la Nesterov ” to build a sequence (y
k
)
k≥0
updated as
y
k
= x
k
+ β
k
(x
k
− x
k−1
) ,
where (β
k
)
k≥0
is a positive decreasing sequence, which we shall define in Section 3.
5
Lin, Mairal and Harchaoui
Without Catalyst With Catalyst
µ > 0 µ = 0 µ > 0 µ = 0
FG O
n
L
µ
log
1
ε
O
n
L
ε
˜
O
n
q
L
µ
log
1
ε
˜
O
n
q
L
ε
SAG/SAGA
O
n +
¯
L
µ
log
1
ε
O
n
¯
L
ε
˜
O
n +
q
n
¯
L
µ
log
1
ε
˜
O
q
n
¯
L
ε
MISO
not avail.
SDCA
SVRG
Acc-FG O
n
q
L
µ
log
1
ε
O
n
L
√
ε
no acceleration
Acc-SDCA
˜
O
n +
q
n
¯
L
µ
log
1
ε
not avail.
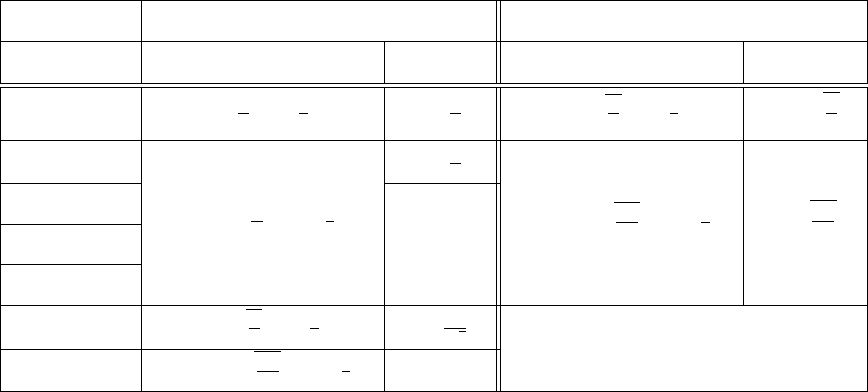
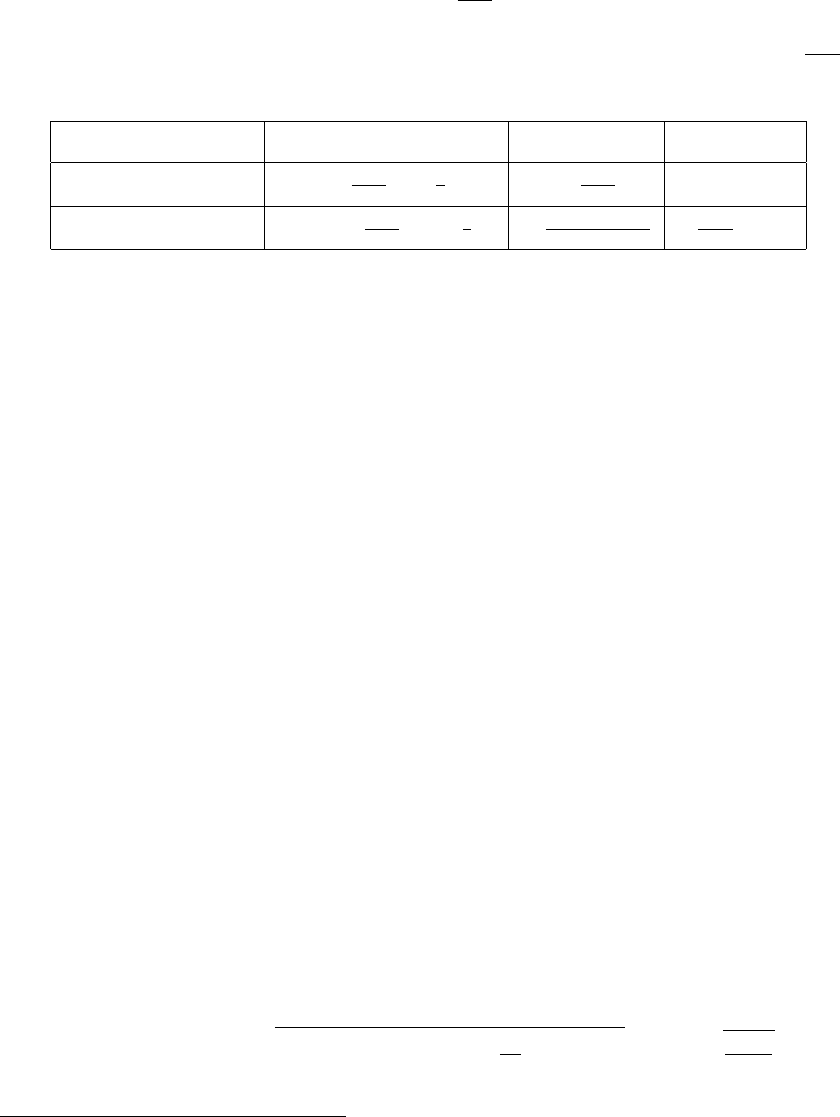
Table 1: Comparison of rates of convergence, before and after the Catalyst acceleration, in
the strongly-convex and non strongly-convex cases, respectively. The notation
˜
O
hides logarithmic factors. The constant L is the global Lipschitz constant of the
gradient’s objective, while
¯
L is the average Lipschitz constants of the gradients
∇f
i
, or the maximum value, depending on the algorithm’s variants considered.
We shall show in Section 4 that we can get faster rates of convergence thanks to this
extrapolation step when the smoothing parameter κ, the inner-loop stopping criterion, and
the sequence (β
k
)
k≥0
are carefully built.
Balancing inner and outer complexities The optimal balance between inner loop and
outer loop complexity derives from the complexity bounds established in Section 4. Given
an estimate about the condition number of f, our bounds dictate a choice of κ that gives the
optimal setting for the inner-loop stopping criterion and all technical quantities involved in
the algorithm. We shall demonstrate in particular the power of an appropriate warm-start
strategy to achieve near-optimal complexity.
Overview of the complexity results Finally, we provide in Table 1 a brief overview
of the complexity results obtained from the Catalyst acceleration, when applied to various
optimization methods M for minimizing a large finite sum of n functions. Note that the
complexity results obtained with Catalyst are optimal, up to some logarithmic factors (see
Agarwal and Bottou, 2015; Arjevani and Shamir, 2016; Woodworth and Srebro, 2016).
2. The Moreau Envelope and its Approximate Variant
In this section, we recall a classical tool from convex analysis called the Moreau envelope
or Moreau-Yosida smoothing (Moreau, 1962; Yosida, 1980), which plays a key role for
understanding the Catalyst acceleration. This tool can be seen as a smoothing technique,
6

Catalyst for First-order Convex Optimization
which can turn any convex lower semicontinuous function f into a smooth function, and an
ill-conditioned smooth convex function into a well-conditioned smooth convex function.
The Moreau envelope results from the infimal convolution of f with a quadratic penalty:
F (x) , min
z∈R
p
n
f(z) +
κ
2
kz − xk
2
o
, (5)
where κ is a positive regularization parameter. The proximal operator is then the unique
minimizer of the problem—that is,
p(x) , prox
f/κ
(x) = arg min
z∈R
p
n
f(z) +
κ
2
kz − xk
2
o
.
Note that p(x) does not admit a closed form in general. Therefore, computing it requires
to solve the sub-problem to high accuracy with some iterative algorithm.
2.1 Basic Properties of the Moreau Envelope
The smoothing effect of the Moreau regularization can be characterized by the next propo-
sition (see Lemar´echal and Sagastiz´abal, 1997, for elementary proofs).
Proposition 1 (Regularization properties of the Moreau Envelope) Given a con-
vex continuous function f and a regularization parameter κ > 0, consider the Moreau
envelope F defined in (5). Then,
1. F is convex and minimizing f and F are equivalent in the sense that
min
x∈R
p
F (x) = min
x∈R
p
f(x) .
Moreover the solution set of the two above problems coincide with each other.
2. F is continuously differentiable even when f is not and
∇F (x) = κ(x − p(x)) . (6)
Moreover the gradient ∇F is Lipschitz continuous with constant L
F
= κ.
3. If f is µ-strongly convex, then F is µ
F
-strongly convex with µ
F
=
µκ
µ+κ
.
Interestingly, F is friendly from an optimization point of view as it is convex and differen-
tiable. Besides, F is κ-smooth with condition number
µ+κ
µ
when f is µ-strongly convex.
Thus F can be made arbitrarily well conditioned by choosing a small κ. Since both functions
f and F admit the same solutions, a naive approach to minimize a non-smooth function f
is to first construct its Moreau envelope F and then apply a smooth optimization method
on it. As we will see next, Catalyst can be seen as an accelerated gradient descent technique
applied to F with inexact gradients.
2.2 A Fresh Look at Catalyst
First-order methods applied to F provide us several well-known algorithms.
7
Lin, Mairal and Harchaoui
The proximal point algorithm. Consider gradient descent steps on F :
x
k+1
= x
k
−
1
L
F
∇F (x
k
).
By noticing that ∇F (x
k
) = κ(x
k
− p(x
k
)) and L
f
= κ, we obtain in fact
x
k+1
= p(x
k
) = arg min
z∈R
p
n
f(z) +
κ
2
kz − x
k
k
2
o
,
which is exactly the proximal point algorithm (Martinet, 1970; Rockafellar, 1976).
Accelerated proximal point algorithm. If gradient descent steps on F yields the
proximal point algorithm, it is then natural to consider the following sequence
x
k+1
= y
k
−
1
L
F
∇F (y
k
) and y
k+1
= x
k+1
+ β
k+1
(x
k+1
− x
k
),
where β
k+1
is Nesterov’s extrapolation parameter (Nesterov, 2004). Again, by using the
closed form of the gradient, this is equivalent to the update
x
k+1
= p(y
k
) and y
k+1
= x
k+1
+ β
k+1
(x
k+1
− x
k
),
which is known as the accelerated proximal point algorithm of G¨uler (1992).
While these algorithms are conceptually elegant, they suffer from a major drawback
in practice: each update requires to evaluate the proximal operator p(x). Unless a closed
form is available, which is almost never the case, we are not able to evaluate p(x) exactly.
Hence an iterative algorithm is required for each evaluation of the proximal operator which
leads to the inner-outer construction (see Algorithm 1). Catalyst can then be interpreted as
an accelerated proximal point algorithm that calls an optimization method M to compute
inexact solutions to the sub-problems. The fact that such a strategy could be used to solve
non-smooth optimization problems was well-known, but the fact that it could be used for
acceleration is more surprising. The main challenge that will be addressed in Section 3 is
how to control the complexity of the inner-loop minimization.
2.3 The Approximate Moreau Envelope
Since Catalyst uses inexact gradients of the Moreau envelope, we start with specifying the
inexactness criteria.
Inexactness through absolute accuracy. Given a proximal center x, a smoothing
parameter κ, and an accuracy ε>0, we denote the set of ε-approximations of the proximal
operator p(x) by
p
ε
(x) , {z ∈ R
p
s.t. h(z) − h
∗
≤ ε} where h(z) = f(z) +
κ
2
kx − zk
2
, (C1)
and h
∗
is the minimum function value of h.
Checking whether h(z) − h
∗
≤ ε may be impactical since h
∗
is unknown in many sit-
uations. We may then replace h
∗
by a lower bound that can be computed more easily.
We may use the Fenchel conjugate for instance. Then, given a point z and a lower-bound
8
Catalyst for First-order Convex Optimization
d(z) ≤ h
∗
, we can guarantee z ∈ p
ε
(x) if h(z) − d(z) ≤ ε. There are other choices for the
lower bounding function d which result from the specific construction of the optimization
algorithm. For instance, dual type algorithms such as SDCA (Shalev-Shwartz and Zhang,
2012) or MISO (Mairal, 2015) maintain a lower bound along the iterations, allowing one to
compute h(z) −d(z) ≤ ε.
When none of the options mentioned above are available, we can use the following fact,
based on the notion of gradient mapping; see Section 2.3.2 of (Nesterov, 2004). The intuition
comes from the smooth case: when h is smooth, the strong convexity yields
h(z) −
1
2κ
k∇h(z)k
2
≤ h
∗
.
In other words, the norm of the gradient provides enough information to assess how far
we are from the optimum. From this perspective, the gradient mapping can be seen as an
extension of the gradient for the composite case where the objective decomposes as a sum
of a smooth part and a non-smooth part (Nesterov, 2004).
Lemma 2 (Checking the absolute accuracy criterion) Consider a proximal center x,
a smoothing parameter κ and an accuracy ε > 0. Consider an objective with the composite
form (1) and we set function h as
h(z) = f (z) +
κ
2
kx − zk
2
= f
0
(z) +
κ
2
kx − zk
2
| {z }
, h
0
+ψ(x).
For any z ∈ R
p
, we define
[z]
η
= prox
ηψ
(z − η∇h
0
(z)) , with η =
1
κ + L
. (7)
Then, the gradient mapping of h at z is defined by
1
η
(z − [z]
η
) and
1
η
kz − [z]
η
k ≤
√
2κε implies [z]
η
∈ p
ε
(x).
The proof is given in Appendix B. The lemma shows that it is sufficient to check the norm
of the gradient mapping to ensure condition (C1). However, this requires an additional full
gradient step and proximal step at each iteration.
As soon as we have an approximate proximal operator z in p
ε
(x) in hand, we can define
an approximate gradient of the Moreau envelope,
g(z) , κ(x − z), (8)
by mimicking the exact gradient formula ∇F (x) = κ(x − p(x)). As a consequence, we may
immediately draw a link
z ∈ p
ε
(x) =⇒ kz − p(x)k ≤
r
2ε
κ
⇐⇒ kg(z) − ∇F (x)k ≤
√
2κε, (9)
where the first implication is a consequence of the strong convexity of h at its minimum p(x).
We will then apply the approximate gradient g instead of ∇F to build the inexact proximal
point algorithm. Since the inexactness of the approximate gradient can be bounded by an
absolute value
√
2κε, we call (C1) the absolute accuracy criterion.
9
Lin, Mairal and Harchaoui
Relative error criterion. Another natural way to bound the gradient approximation is
by using a relative error, namely in the form kg(z) −∇F (x)k ≤ δ
0
k∇F (x)k for some δ
0
> 0.
This leads us to the following inexactness criterion.
Given a proximal center x, a smoothing parameter κ and a relative accuracy δ in [0, 1),
we denote the set of δ-relative approximations by
g
δ
(x) ,
z ∈ R
p
s.t. h(z) − h
∗
≤
δκ
2
kx − zk
2
, (C2)
At a first glance, we may interpret the criterion (C2) as (C1) by setting ε =
δκ
2
kx − zk
2
.
But we should then notice that the accuracy depends on the point z, which is is no longer
an absolute constant. In other words, the accuracy varies from point to point, which is
proportional to the squared distance between z and x. First one may wonder whether g
δ
(x)
is an empty set. Indeed, it is easy to see that p(x) ∈ g
δ
(x) since h(p(x)) − h
∗
= 0 ≤
δκ
2
kx −p(x)k
2
. Moreover, by continuity, g
δ
(x) is closed set around p(x). Then, by following
similar steps as in (9), we have
z ∈ g
δ
(x) =⇒ kz − p(x)k ≤
√
δkx − zk ≤
√
δ(kx − p(x)k + kp(x) −zk).
By defining the approximate gradient in the same way g(z) = κ(x − z) yields,
z ∈ g
δ
(x) =⇒ kg(z) − ∇F (x)k ≤ δ
0
k∇F (x)k with δ
0
=
√
δ
1 −
√
δ
,
which is the desired relative gradient approximation.
Finally, the discussion about bounding h(z)−h
∗
still holds here. In particular, Lemma 2
may be used by setting the value ε =
δκ
2
kx−zk
2
. The price to pay is as an additional gradient
step and an additional proximal step per iteration.
A few remarks on related works. Inexactness criteria with respect to subgradient
norms have been investigated in the past, starting from the pioneer work of Rockafel-
lar (1976) in the context of the inexact proximal point algorithm. Later, different works
have been dedicated to more practical inexactness criteria (Auslender, 1987; Correa and
Lemar´echal, 1993; Solodov and Svaiter, 2001; Fuentes et al., 2012). These criteria include
duality gap, ε-subdifferential, or decrease in terms of function value. Here, we present a
more intuitive point of view using the Moreau envelope.
While the proximal point algorithm has caught a lot of attention, very few works have
focused on its accelerated variant. The first accelerated proximal point algorithm with
inexact gradients was proposed by G¨uler (1992). Then, Salzo and Villa (2012) proposed
a more rigorous convergence analysis, and more inexactness criteria, which are typically
stronger than ours. In the same way, a more general inexact oracle framework has been
proposed later by Devolder et al. (2014). To achieve the Catalyst acceleration, our main
effort was to propose and analyze criteria that allow us to control the complexity for finding
approximate solutions of the sub-problems.
3. Catalyst Acceleration
Catalyst is presented in Algorithm 2. As discussed in Section 2, this scheme can be inter-
preted as an inexact accelerated proximal point algorithm, or equivalently as an accelerated
10
Catalyst for First-order Convex Optimization
gradient descent method applied to the Moreau envelope of the objective with inexact gradi-
ents. Since an overview has already been presented in Section 1.2, we now present important
details to obtain acceleration in theory and in practice.
Algorithm 2 Catalyst
input Initial estimate x
0
in R
p
, smoothing parameter κ, strong convexity parameter µ,
optimization method M and a stopping criterion based on a sequence of accuracies
(ε
k
)
k≥0
, or (δ
k
)
k≥0
, or a fixed budget T .
1: Initialize y
0
= x
0
, q =
µ
µ+κ
. If µ > 0, set α
0
=
√
q, otherwise α
0
= 1.
2: while the desired accuracy is not achieved do
3: Compute an approximate solution of the following problem with M
x
k
≈ arg min
x∈R
p
n
h
k
(x) , f (x) +
κ
2
kx − y
k−1
k
2
o
,
using the warm-start strategy of Section 3 and one of the following stopping criteria:
(a) absolute accuracy: find x
k
in p
ε
k
(y
k−1
) by using criterion (C1);
(b) relative accuracy: find x
k
in g
δ
k
(y
k−1
) by using criterion (C2);
(c) fixed budget: run M for T iterations and output x
k
.
4: Update α
k
in (0, 1) by solving the equation
α
2
k
= (1 − α
k
)α
2
k−1
+ qα
k
. (10)
5: Compute y
k
with Nesterov’s extrapolation step
y
k
= x
k
+ β
k
(x
k
− x
k−1
) with β
k
=
α
k−1
(1 − α
k−1
)
α
2
k−1
+ α
k
. (11)
6: end while
output x
k
(final estimate).
Requirement: linear convergence of the method M. One of the main characteristic
of Catalyst is to apply the method M to strongly-convex sub-problems, without requiring
strong convexity of the objective f. As a consequence, Catalyst provides direct support
for convex but non-strongly convex objectives to M, which may be useful to extend the
scope of application of techniques that need strong convexity to operate. Yet, Catalyst
requires solving these sub-problems efficiently enough in order to control the complexity of
the inner-loop computations. When applying M to minimize a strongly-convex function h,
we assume that M is able to produce a sequence of iterates (z
t
)
t≥0
such that
h(z
t
) − h
∗
≤ C
M
(1 − τ
M
)
t
(h(z
0
) − h
∗
), (12)
where z
0
is the initial point given to M, and τ
M
in (0, 1), C
M
> 0 are two constants. In such
a case, we say that M admits a linear convergence rate. The quantity τ
M
controls the speed
11
Lin, Mairal and Harchaoui
of convergence for solving the sub-problems: the larger is τ
M
, the faster is the convergence.
For a given algorithm M, the quantity τ
M
depends usually on the condition number of h.
For instance, for the proximal gradient method and many first-order algorithms, we simply
have τ
M
= O((µ+κ)/(L+κ)), as h is (µ+κ)-strongly convex and (L+κ)-smooth. Catalyst
can also be applied to randomized methods M that satisfy (12) in expectation:
E[h(z
t
) − h
∗
] ≤ C
M
(1 − τ
M
)
t
(h(z
0
) − h
∗
), (13)
Then, the complexity results of Section 4 also hold in expectation. This allows us to apply
Catalyst to randomized block coordinate descent algorithms (see Richt´arik and Tak´aˇc, 2014,
and references therein), and some incremental algorithms such as SAG, SAGA, or SVRG.
For other methods that admit a linear convergence rates in terms of duality gap, such as
SDCA, MISO/Finito, Catalyst can also be applied as explained in Appendix C.
Stopping criteria. Catalyst may be used with three types of stopping criteria for solving
the inner-loop problems. We now detail them below.
(a) absolute accuracy: we predefine a sequence (ε
k
)
k≥0
of accuracies, and stop the
method M by using the absolute stopping criterion (C1). Our analysis suggests
– if f is µ-strongly convex,
ε
k
=
1
2
(1 − ρ)
k
(f(x
0
) − f
∗
) with ρ <
√
q .
– if f is convex but not strongly convex,
ε
k
=
f(x
0
) − f
∗
2(k + 2)
4+γ
with γ > 0 .
Typically, γ = 0.1 and ρ = 0.9
√
q are reasonable choices, both in theory and in
practice. Of course, the quantity f(x
0
) − f
∗
is unknown and we need to upper
bound it by a duality gap or by Lemma 2 as discussed in Section 2.3.
(b) relative accuracy: To use the relative stopping criterion (C2), our analysis suggests
the following choice for the sequence (δ
k
)
k≥0
:
– if f is µ-strongly convex,
δ
k
=
√
q
2 −
√
q
.
– if f is convex but not strongly convex,
δ
k
=
1
(k + 1)
2
.
(c) fixed budget: Finally, the simplest way of using Catalyst is to fix in advance the
number T of iterations of the method M for solving the sub-problems without
12
Catalyst for First-order Convex Optimization
checking any optimality criterion. Whereas our analysis provides theoretical bud-
gets that are compatible with this strategy, we found them to be pessimistic and
impractical. Instead, we propose an aggressive strategy for incremental methods
that simply consists of setting T = n. This setting was called the “one-pass”
strategy in the original Catalyst paper (Lin et al., 2015a).
Warm-starts in inner loops. Besides linear convergence rate, an adequate warm-start
strategy needs to be used to guarantee that the sub-problems will be solved in reasonable
computational time. The intuition is that the previous solution may still be a good ap-
proximation of the current subproblem. Specifically, the following choices arise from the
convergence analysis that will be detailed in Section 4.
Consider the minimization of the (k + 1)-th subproblem h
k+1
(z) = f(z) +
κ
2
kz − y
k
k
2
,
we warm start the optimization method M at z
0
as following:
(a) when using criterion (C1) to find x
k+1
in p
ε
k
(y
k
),
– if f is smooth (ψ = 0), then choose z
0
= x
k
+
κ
κ+µ
(y
k
− y
k−1
).
– if f is composite as in (1), then define w
0
= x
k
+
κ
κ+µ
(y
k
− y
k−1
) and
z
0
= [w
0
]
η
= prox
ηψ
(w
0
− ηg) with η =
1
L + κ
and g = ∇f
0
(w
0
)+κ(w
0
−y
k
).
(b) when using criteria (C2) to find x
k+1
in g
δ
k
(y
k
),
– if f is smooth (ψ = 0), then choose z
0
= y
k
.
– if f is composite as in (1), then choose
z
0
= [y
k
]
η
= prox
ηψ
(y
k
− η∇f
0
(y
k
)) with η =
1
L + κ
.
(c) when using a fixed budget T , choose the same warm start strategy as in (b).
Note that the earlier conference paper (Lin et al., 2015a) considered the the warm start
rule z
0
= x
k−1
. That variant is also theoretically validated but it does not perform as well
as the ones proposed here in practice.
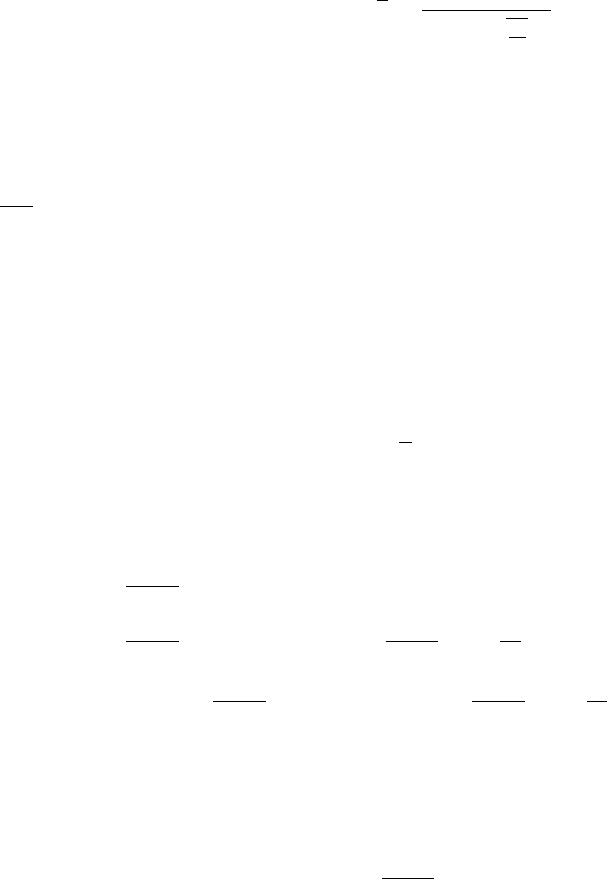
Optimal balance: choice of parameter κ. Finally, the last ingredient is to find an
optimal balance between the inner-loop (for solving each sub-problem) and outer-loop com-
putations. To do so, we minimize our global complexity bounds with respect to the value
of κ. As we shall see in Section 5, this strategy turns out to be reasonable in practice.
Then, as shown in the theoretical section, the resulting rule of thumb is
We select κ by maximizing the ratio τ
M
/
√
µ + κ.
13
Lin, Mairal and Harchaoui
We recall that τ
M
characterizes how fast M solves the sub-problems, according to (12);
typically, τ
M
depends on the condition number
L+κ
µ+κ
and is a function of κ.
2
In Table 2, we
illustrate the choice of κ for different methods. Note that the resulting rule for incremental
methods is very simple for the pracitioner: select κ such that the condition number
¯
L+κ
µ+κ
is
of the order of n; then, the inner-complexity becomes O(n log(1/ε)).
Method M Inner-complexity τ
M
Choice for κ
FG O
n
L+κ
µ+κ
log
1
ε
∝
µ+κ
L+κ
L − 2µ
SAG/SAGA/SVRG O
n +
¯
L+κ
µ+κ
log
1
ε
∝
µ+κ
n(µ+κ)+
¯
L+κ
¯
L−µ
n+1
− µ
Table 2: Example of choices of the parameter κ for the full gradient (FG) and incremental
methods SAG/SAGA/SVRG. See Table 1 for details about the complexity.
4. Convergence and Complexity Analysis
We now present the complexity analysis of Catalyst. In Section 4.1, we analyze the con-
vergence rate of the outer loop, regardless of the complexity for solving the sub-problems.
Then, we analyze the complexity of the inner-loop computations for our various stopping
criteria and warm-start strategies in Section 4.2. Section 4.3 combines the outer- and inner-
loop analysis to provide the global complexity of Catalyst applied to a given optimization
method M.
4.1 Complexity Analysis for the Outer-Loop
The complexity analysis of the first variant of Catalyst we presented in (Lin et al., 2015a)
used a tool called “estimate sequence”, which was introduced by Nesterov (2004). Here, we
provide a simpler proof. We start with criterion (C1), before extending the result to (C2).
4.1.1 Analysis for Criterion (C1)
The next theorem describes how the errors (ε
k
)
k≥0
accumulate in Catalyst.
Theorem 3 (Convergence of outer-loop for criterion (C1)) Consider the sequences
(x
k
)
k≥0
and (y
k
)
k≥0
produced by Algorithm 2, assuming that x
k
is in p
ε
k
(y
k−1
) for all k ≥ 1,
Then,
f(x
k
) − f
∗
≤ A
k−1
r
(1 − α
0
)(f(x
0
) − f
∗
) +
γ
0
2
kx
∗
− x
0
k
2
+ 3
k
X
j=1
r
ε
j
A
j−1
2
,
2. Note that the rule for the non strongly convex case, denoted here by µ = 0, slightly differs from Lin
et al. (2015a) and results from a tighter complexity analysis.
14
Catalyst for First-order Convex Optimization
where
γ
0
= (κ + µ)α
0
(α
0
− q) and A
k
=
k
Y
j=1
(1 − α
j
) with A
0
= 1 . (14)
Before we prove this theorem, we note that by setting ε
k
= 0 for all k, the speed of
convergence of f (x
k
) −f
∗
is driven by the sequence (A
k
)
k≥0
. Thus we first show the speed
of A
k
by recalling the Lemma 2.2.4 of Nesterov (2004).
Lemma 4 (Lemma 2.2.4 of Nesterov 2004) Consider the quantities γ
0
, A
k
defined in (14)
and the α
k
’s defined in Algorithm 2. Then, if γ
0
≥ µ,
A
k
≤ min
(1 −
√
q)
k
,
4
2 + k
q
γ
0
κ
2
.
For non-strongly convex objectives, A
k
follows the classical accelerated O(1/k
2
) rate of
convergence, whereas it achieves a linear convergence rate for the strongly convex case.
Intuitively, we are applying an inexact Nesterov method on the Moreau envelope F , thus
the convergence rate naturally depends on the inverse of its condition number, which is
q =
µ
µ+κ
. We now provide the proof of the theorem below.
Proof We start by defining an approximate sufficient descent condition inspired by a
remark of Chambolle and Pock (2015) regarding accelerated gradient descent methods. A
related condition was also used by Paquette et al. (2018) in the context of non-convex
optimization.
Approximate sufficient descent condition. Let us define the function
h
k
(x) = f(x) +
κ
2
kx − y
k−1
k
2
.
Since p(y
k−1
) is the unique minimizer of h
k
, the strong convexity of h
k
yields: for any k ≥ 1,
for all x in R
p
and any θ
k
> 0,
h
k
(x) ≥ h
∗
k
+
κ + µ
2
kx − p(y
k−1
)k
2
≥ h
∗
k
+
κ + µ
2
(1 − θ
k
) kx − x
k
k
2
+
κ + µ
2
1 −
1
θ
k
kx
k
− p(y
k−1
)k
2
≥ h
k
(x
k
) − ε
k
+
κ + µ
2
(1 − θ
k
) kx − x
k
k
2
+
κ + µ
2
1 −
1
θ
k
kx
k
− p(y
k−1
)k
2
,
where the (µ + κ)-strong convexity of h
k
is used in the first inequality; Lemma 19 is used
in the second inequality, and the last one uses the relation h
k
(x
k
) − h
∗
k
≤ ε
k
. Moreover,
when θ
k
≥ 1, the last term is positive and we have
h
k
(x) ≥ h
k
(x
k
) − ε
k
+
κ + µ
2
(1 − θ
k
) kx − x
k
k
2
.
15
Lin, Mairal and Harchaoui
If instead θ
k
≤ 1, the coefficient
1
θ
k
− 1 is non-negative and we have
−
κ + µ
2
1
θ
k
− 1
kx
k
− p(y
k−1
)k
2
≥ −
1
θ
k
− 1
(h
k
(x
k
) − h
∗
k
) ≥ −
1
θ
k
− 1
ε
k
.
In this case, we have
h
k
(x) ≥ h
k
(x
k
) −
ε
k
θ
k
+
κ + µ
2
(1 − θ
k
) kx − x
k
k
2
.
As a result, we have for all value of θ
k
> 0,
h
k
(x) ≥ h
k
(x
k
) +
κ + µ
2
(1 − θ
k
) kx − x
k
k
2
−
ε
k
min{1, θ
k
}
.
After expanding the expression of h
k
, we then obtain the approximate descent condition
f(x
k
)+
κ
2
kx
k
−y
k−1
k
2
+
κ + µ
2
(1 − θ
k
) kx−x
k
k
2
≤ f (x)+
κ
2
kx−y
k−1
k
2
+
ε
k
min{1, θ
k
}
. (15)
Definition of the Lyapunov function. We introduce a sequence (S
k
)
k≥0
that will act
as a Lyapunov function, with
S
k
= (1 − α
k
)(f(x
k
) − f
∗
) + α
k
κη
k
2
kx
∗
− v
k
k
2
. (16)
where x
∗
is a minimizer of f, (v
k
)
k≥0
is a sequence defined by v
0
= x
0
and
v
k
= x
k
+
1 − α
k−1
α
k−1
(x
k
− x
k−1
) for k ≥ 1,
and (η
k
)
k≥0
is an auxiliary quantity defined by
η
k
=
α
k
− q
1 − q
.
The way we introduce these variables allow us to write the following relationship,
y
k
= η
k
v
k
+ (1 −η
k
)x
k
, for all k ≥ 0,
which follows from a simple calculation. Then by setting z
k
= α
k−1
x
∗
+ (1 −α
k−1
)x
k−1
the
following relations hold for all k ≥ 1.
f(z
k
) ≤ α
k−1
f
∗
+ (1 −α
k−1
)f(x
k−1
) −
µα
k−1
(1 − α
k−1
)
2
kx
∗
− x
k−1
k
2
,
z
k
− x
k
= α
k−1
(x
∗
− v
k
),
and also the following one
kz
k
− y
k−1
k
2
= k(α
k−1
− η
k−1
)(x
∗
− x
k−1
) + η
k−1
(x
∗
− v
k−1
)k
2
= α
2
k−1
1 −
η
k−1
α
k−1
(x
∗
− x
k−1
) +
η
k−1
α
k−1
(x
∗
− v
k−1
)
2
≤ α
2
k−1
1 −
η
k−1
α
k−1
kx
∗
− x
k−1
k
2
+ α
2
k−1
η
k−1
α
k−1
kx
∗
− v
k−1
k
2
= α
k−1
(α
k−1
− η
k−1
)kx
∗
− x
k−1
k
2
+ α
k−1
η
k−1
kx
∗
− v
k−1
k
2
,
16
Catalyst for First-order Convex Optimization
where we used the convexity of the norm and the fact that η
k
≤ α
k
. Using the previous
relations in (15) with x = z
k
= α
k−1
x
∗
+ (1 −α
k−1
)x
k−1
, gives for all k ≥ 1,
f(x
k
) +
κ
2
kx
k
− y
k−1
k
2
+
κ + µ
2
(1 − θ
k
) α
2
k−1
kx
∗
− v
k
k
2
≤ α
k−1
f
∗
+ (1 −α
k−1
)f(x
k−1
) −
µ
2
α
k−1
(1 − α
k−1
)kx
∗
− x
k−1
k
2
+
κα
k−1
(α
k−1
− η
k−1
)
2
kx
∗
− x
k−1
k
2
+
κα
k−1
η
k−1
2
kx
∗
− v
k−1
k
2
+
ε
k
min{1, θ
k
}
.
Remark that for all k ≥ 1,
α
k−1
− η
k−1
= α
k−1
−
α
k−1
− q
1 − q
=
q(1 − α
k−1
)
1 − q
=
µ
κ
(1 − α
k−1
),
and the quadratic terms involving x
∗
− x
k−1
cancel each other. Then, after noticing that
for all k ≥ 1,
η
k
α
k
=
α
2
k
− qα
k
1 − q
=
(κ + µ)(1 −α
k
)α
2
k−1
κ
,
which allows us to write
f(x
k
) − f
∗
+
κ + µ
2
α
2
k−1
kx
∗
− v
k
k
2
=
S
k
1 − α
k
. (17)
We are left, for all k ≥ 1, with
1
1 − α
k
S
k
≤ S
k−1
+
ε
k
min{1, θ
k
}
−
κ
2
kx
k
− y
k−1
k
2
+
(κ + µ)α
2
k−1
θ
k
2
kx
∗
− v
k
k
2
. (18)
Control of the approximation errors for criterion (C1). Using the fact that
1
min{1, θ
k
}
≤ 1 +
1
θ
k
,
we immediately derive from equation (18) that
1
1 − α
k
S
k
≤ S
k−1
+ ε
k
+
ε
k
θ
k
−
κ
2
kx
k
− y
k−1
k
2
+
(κ + µ)α
2
k−1
θ
k
2
kx
∗
− v
k
k
2
. (19)
By minimizing the right-hand side of (19) with respect to θ
k
, we obtain the following
inequality
1
1 − α
k
S
k
≤ S
k−1
+ ε
k
+
p
2ε
k
(µ + κ)α
k−1
kx
∗
− v
k
k,
and after unrolling the recursion,
S
k
A
k
≤ S
0
+
k
X
j=1
ε
j
A
j−1
+
k
X
j=1
p
2ε
j
(µ + κ)α
j−1
kx
∗
− v
j
k
A
j−1
.
17
Lin, Mairal and Harchaoui
From Equation (17), the lefthand side is larger than
(µ+κ)α
2
k−1
kx
∗
−v
k
k
2
2A
k−1
. We may now define
u
j
=
√
(µ+κ)α
j−1
kx
∗
−v
j
k
√
2A
j−1
and a
j
= 2
√
ε
j
√
A
j−1
, and we have
u
2
k
≤ S
0
+
k
X
j=1
ε
j
A
j−1
+
k
X
j=1
a
j
u
j
for all k ≥ 1.
This allows us to apply Lemma 20, which yields
S
k
A
k
≤
v
u
u
t
S
0
+
k
X
j=1
ε
j
A
j−1
+ 2
k
X
j=1
r
ε
j
A
j−1
2
,
≤
p
S
0
+ 3
k
X
j=1
r
ε
j
A
j−1
2
which provides us the desired result given that f(x
k
) − f
∗
≤
S
k
1−α
k
and that v
0
= x
0
.
We are now in shape to state the convergence rate of the Catalyst algorithm with
criterion (C1), without taking into account yet the cost of solving the sub-problems. The
next two propositions specialize Theorem 3 to the strongly convex case and non strongly
convex cases, respectively. Their proofs are provided in Appendix B.
Proposition 5 (µ-strongly convex case, criterion (C1))
In Algorithm 2, choose α
0
=
√
q and
ε
k
=
2
9
(f(x
0
) − f
∗
)(1 − ρ)
k
with ρ <
√
q.
Then, the sequence of iterates (x
k
)
k≥0
satisfies
f(x
k
) − f
∗
≤
8
(
√
q − ρ)
2
(1 − ρ)
k+1
(f(x
0
) − f
∗
).
Proposition 6 (Convex case, criterion (C1))
When µ = 0, choose α
0
= 1 and
ε
k
=
2(f(x
0
) − f
∗
)
9(k + 1)
4+γ
with γ > 0.
Then, Algorithm 2 generates iterates (x
k
)
k≥0
such that
f(x
k
) − f
∗
≤
8
(k + 1)
2
κ
2
kx
0
− x
∗
k
2
+
4
γ
2
(f(x
0
) − f
∗
)
.
18
Catalyst for First-order Convex Optimization
4.1.2 Analysis for Criterion (C2)
Then, we may now analyze the convergence of Catalyst under criterion (C2), which offers
similar guarantees as (C1), as far as the outer loop is concerned.
Theorem 7 (Convergence of outer-loop for criterion (C2)) Consider the sequences
(x
k
)
k≥0
and (y
k
)
k≥0
produced by Algorithm 2, assuming that x
k
is in g
δ
k
(y
k−1
) for all k ≥ 1
and δ
k
in (0, 1). Then,
f(x
k
) − f
∗
≤
A
k−1
Q
k
j=1
(1 − δ
j
)
(1 − α
0
)(f(x
0
) − f
∗
) +
γ
0
2
kx
0
− x
∗
k
2
,
where γ
0
and (A
k
)
k≥0
are defined in (14) in Theorem 3.
Proof Remark that x
k
in g
δ
k
(y
k−1
) is equivalent to x
k
in p
ε
k
(y
k−1
) with an adaptive error
ε
k
=
δ
k
κ
2
kx
k
− y
k−1
k
2
. All steps of the proof of Theorem 3 hold for such values of ε
k
and
from (18), we may deduce
S
k
1 − α
k
−
(κ + µ)α
2
k−1
θ
k
2
kx
∗
− v
k
k
2
≤ S
k−1
+
δ
k
κ
2 min{1, θ
k
}
−
κ
2
kx
k
− y
k−1
k
2
.
Then, by choosing θ
k
= δ
k
< 1, the quadratic term on the right disappears and the left-hand
side is greater than
1−δ
k
1−α
k
S
k
. Thus,
S
k
≤
1 − α
k
1 − δ
k
S
k−1
≤
A
k
Q
k
j=1
(1 − δ
j
)
S
0
,
which is sufficient to conclude since (1 − α
k
)(f(x
k
) − f
∗
) ≤ S
k
.
The next propositions specialize Theorem 7 for specific choices of sequence (δ
k
)
k≥0
in
the strongly and non strongly convex cases.
Proposition 8 (µ-strongly convex case, criterion (C2))
In Algorithm 2, choose α
0
=
√
q and
δ
k
=
√
q
2 −
√
q
.
Then, the sequence of iterates (x
k
)
k≥0
satisfies
f(x
k
) − f
∗
≤ 2
1 −
√
q
2
k
(f(x
0
) − f
∗
) .
Proof This is a direct application of Theorem 7 by remarking that γ
0
= (1 −
√
q)µ and
S
0
= (1 −
√
q)
f(x
0
) − f
∗
+
µ
2
kx
∗
− x
0
k
2
≤ 2(1 −
√
q)(f(x
0
) − f
∗
).
And α
k
=
√
q for all k ≥ 0 leading to
1 − α
k
1 − δ
k
= 1 −
√
q
2
19

Lin, Mairal and Harchaoui
Proposition 9 (Convex case, criterion (C2))
When µ = 0, choose α
0
= 1 and
δ
k
=
1
(k + 1)
2
.
Then, Algorithm 2 generates iterates (x
k
)
k≥0
such that
f(x
k
) − f
∗
≤
4κkx
0
− x
∗
k
2
(k + 1)
2
. (20)
Proof This is a direct application of Theorem 7 by remarking that γ
0
= κ, A
k
≤
4
(k+2)
2
(Lemma 4) and
k
Y
i=1
1 −
1
(i + 1)
2
=
k
Y
i=1
i(i + 2)
(i + 1)
2
=
k + 2
2(k + 1)
≥
1
2
.
Remark 10 In fact, the choice of δ
k
can be improved by taking δ
k
=
1
(k+1)
1+γ
for any
γ > 0, which comes at the price of a larger constant in (20).
4.2 Analysis of Warm-start Strategies for the Inner Loop
In this section, we study the complexity of solving the subproblems with the proposed warm
start strategies. The only assumption we make on the optimization method M is that it
enjoys linear convergence when solving a strongly convex problem—meaning, it satisfies
either (12) or its randomized variant (13). Then, the following lemma gives us a relation
between the accuracy required to solve the sub-problems and the corresponding complexity.
Lemma 11 (Accuracy vs. complexity) Let us consider a strongly convex objective h
and a linearly convergent method M generating a sequence of iterates (z
t
)
t≥0
for minimiz-
ing h. Consider the complexity T (ε) = inf{t ≥ 0, h(z
t
) − h
∗
≤ ε}, where ε > 0 is the target
accuracy and h
∗
is the minimum value of h. Then,
1. If M is deterministic and satisfies (12), we have
T (ε) ≤
1
τ
M
log
C
M
(h(z
0
) − h
∗
)
ε
.
2. If M is randomized and satisfies (13), we have
E[T (ε)] ≤
1
τ
M
log
2C
M
(h(z
0
) − h
∗
)
τ
M
ε
+ 1
The proof of the deterministic case is straightforward and the proof of the randomized case
is provided in Appendix B.4. From the previous result, a good initialization is essential for
fast convergence. More precisely, it suffices to control the initialization
h(z
0
)−h
∗
ε
in order to
bound the number of iterations T (ε). For that purpose, we analyze the quality of various
warm-start strategies.
20
Catalyst for First-order Convex Optimization
4.2.1 Warm Start Strategies for Criterion (C1)
The next proposition characterizes the quality of initialization for (C1).
Proposition 12 (Warm start for criterion (C1)) Assume that M is linearly conver-
gent for strongly convex problems with parameter τ
M
according to (12), or according to (13)
in the randomized case. At iteration k + 1 of Algorithm 2, given the previous iterate x
k
in p
ε
k
(y
k−1
), we consider the following function
h
k+1
(z) = f (z) +
κ
2
kz − y
k
k
2
,
which we minimize with M, producing a sequence (z
t
)
t≥0
. Then,
• when f is smooth, choose z
0
= x
k
+
κ
κ+µ
(y
k
− y
k−1
);
• when f = f
0
+ ψ is composite, choose z
0
= [w
0
]
η
= prox
ηψ
(w
0
− η∇h
0
(w
0
)) with
w
0
= x
k
+
κ
κ+µ
(y
k
− y
k−1
), η =
1
L+κ
and h
0
= f
0
+
κ
2
k · −y
k
k
2
.
We also assume that we choose α
0
and (ε
k
)
k≥0
according to Proposition 5 for µ > 0, or
Proposition 6 for µ = 0. Then,
1. if f is µ-strongly convex, h
k+1
(z
0
) − h
∗
k+1
≤ Cε
k+1
where,
C =
L + κ
κ + µ
2
1 − ρ
+
2592(κ + µ)
(1 − ρ)
2
(
√
q − ρ)
2
µ
if f is smooth, (21)
or
C =
L + κ
κ + µ
2
1 − ρ
+
23328(L + κ)
(1 − ρ)
2
(
√
q − ρ)
2
µ
if f is composite. (22)
2. if f is convex with bounded level sets, there exists a constant B > 0 that only depends
on f, x
0
and κ such that
h
k+1
(z
0
) − h
∗
k+1
≤ B. (23)
Proof We treat the smooth and composite cases separately.
Smooth and strongly-convex case. When f is smooth, by the gradient Lipschitz as-
sumption,
h
k+1
(z
0
) − h
∗
k+1
≤
(L + κ)
2
kz
0
− p(y
k
)k
2
.
Moreover,
kz
0
− p(y
k
)k
2
=
x
k
+
κ
κ + µ
(y
k
− y
k−1
) − p(y
k
)
2
=
x
k
− p(y
k−1
) +
κ
κ + µ
(y
k
− y
k−1
) − (p(y
k
) − p(y
k−1
))
2
≤ 2kx
k
− p(y
k−1
)k
2
+ 2
κ
κ + µ
(y
k
− y
k−1
) − (p(y
k
) − p(y
k−1
))
2
.
21
Lin, Mairal and Harchaoui
Since x
k
is in p
ε
k
(y
k−1
), we may control the first quadratic term on the right by noting that
kx
k
− p(y
k−1
)k
2
≤
2
κ + µ
(h
k
(x
k
) − h
∗
k
) ≤
2ε
k
κ + µ
.
Moreover, by the coerciveness property of the proximal operator,
κ
κ + µ
(y
k
− y
k−1
) − (p(y
k
) − p(y
k−1
))
2
≤ ky
k
− y
k−1
k
2
,
see Appendix B.5 for the proof. As a consequence,
h
k+1
(z
0
) − h
∗
k+1
≤
(L + κ)
2
kz
0
− p(y
k
)k
2
≤ 2
L + κ
µ + κ
ε
k
+ (L + κ)ky
k
− y
k−1
k
2
,
(24)
Then, we need to control the term ky
k
−y
k−1
k
2
. Inspired by the proof of accelerated SDCA
of Shalev-Shwartz and Zhang (2016),
ky
k
− y
k−1
k = kx
k
+ β
k
(x
k
− x
k−1
) − x
k−1
− β
k−1
(x
k−1
− x
k−2
)k
≤ (1 + β
k
)kx
k
− x
k−1
k + β
k−1
kx
k−1
− x
k−2
k
≤ 3 max {kx
k
− x
k−1
k, kx
k−1
− x
k−2
k},
The last inequality was due to the fact that β
k
≤ 1. In fact,
β
2
k
=
α
k−1
− α
2
k−1
2
α
2
k−1
+ α
k
2
=
α
2
k−1
+ α
4
k−1
− 2α
3
k−1
α
2
k
+ 2α
k
α
2
k−1
+ α
4
k−1
=
α
2
k−1
+ α
4
k−1
− 2α
3
k−1
α
2
k−1
+ α
4
k−1
+ qα
k
+ α
k
α
2
k−1
≤ 1,
where the last equality uses the relation α
2
k
+ α
k
α
2
k−1
= α
2
k−1
+ qα
k
from (10). Then,
kx
k
− x
k−1
k ≤ kx
k
− x
∗
k + kx
k−1
− x
∗
k,
and by strong convexity of f
µ
2
kx
k
− x
∗
k
2
≤ f (x
k
) − f
∗
≤
36
(
√
q − ρ)
2
ε
k+1
,
where the last inequality is obtained from Proposition 5. As a result,
ky
k
− y
k−1
k
2
≤ 9 max
kx
k
− x
k−1
k
2
, kx
k−1
− x
k−2
k
2
≤ 36 max
kx
k
− x
∗
k
2
, kx
k−1
− x
∗
k
2
, kx
k−2
− x
∗
k
2
≤
2592 ε
k−1
(
√
q − ρ)
2
µ
.
Since ε
k+1
= (1 − ρ)
2
ε
k−1
, we may now obtain (21) from (24) and the previous bound.
22
Catalyst for First-order Convex Optimization
Smooth and convex case. When µ = 0, Eq. (24) is still valid but we need to control
ky
k
−y
k−1
k
2
in a different way. From Proposition 6, the sequence (f(x
k
))
k≥0
is bounded by
a constant that only depends on f and x
0
; therefore, by the bounded level set assumption,
there exists R > 0 such that
kx
k
− x
∗
k ≤ R, for all k ≥ 0.
Thus, following the same argument as the strongly convex case, we have
ky
k
− y
k−1
k ≤ 36R
2
for all k ≥ 1,
and we obtain (23) by combining the previous inequality with (24).
Composite case. By using the notation of gradient mapping introduced in (7), we
have z
0
= [w
0
]
η
. By following similar steps as in the proof of Lemma 2, the gradient
mapping satisfies the following relation
h
k+1
(z
0
) − h
∗
k+1
≤
1
2(κ + µ)
1
η
(w
0
− z
0
)
2
,
and it is sufficient to bound kw
0
− z
0
k = kw
0
− [w
0
]
η
k. For that, we introduce
[x
k
]
η
= prox
ηψ
(x
k
− η(∇f
0
(x
k
) + κ(x
k
− y
k−1
))).
Then,
kw
0
− [w
0
]
η
k ≤ kw
0
− x
k
k + kx
k
− [x
k
]
η
k + k[x
k
]
η
− [w
0
]
η
k, (25)
and we will bound each term on the right. By construction
kw
0
− x
k
k =
κ
κ + µ
ky
k
− y
k−1
k ≤ ky
k
− y
k−1
k.
Next, it is possible to show that the gradient mapping satisfies the following relation (see
Nesterov, 2013),
1
2η
kx
k
− [x
k
]
η
k
2
≤ h
k
(x
k
) − h
∗
k
≤ ε
k
.
And then since [x
k
]
η
= prox
ηψ
(x
k
− η(∇f
0
(x
k
) + κ(x
k
− y
k−1
))) and [w
0
]
η
= prox
ηψ
(w
0
−
η(∇f
0
(w
0
) + κ(w
0
− y
k
))). From the non expansiveness of the proximal operator, we have
k[x
k
]
η
− [w
0
]
η
k ≤ kx
k
− η(∇f
0
(x
k
) + κ(x
k
− y
k−1
)) − (w
0
− η(∇f
0
(w
0
) + κ(w
0
− y
k
))) k
≤ kx
k
− η(∇f
0
(x
k
) + κ(x
k
− y
k−1
)) − (w
0
− η(∇f
0
(w
0
) + κ(w
0
− y
k−1
))) k
+ ηκky
k
− y
k−1
k
≤ kx
k
− w
0
k + ηκky
k
− y
k−1
k
≤ 2ky
k
− y
k−1
k.
We have used the fact that kx − η∇h(x) − (y − η∇h(y))k ≤ kx − yk. By combining the
previous inequalities with (25), we finally have
kw
0
− [w
0
]
η
k ≤
p
2ηε
k
+ 3ky
k
− y
k−1
k.
23

Lin, Mairal and Harchaoui
Thus, by using the fact that (a + b)
2
≤ 2a
2
+ 2b
2
for all a, b,
h
k+1
(z
0
) − h
∗
k+1
≤
L + κ
κ + µ
2ε
k
+ 9(L + κ)ky
k
− y
k−1
k
2
,
and we can obtain (22) and (23) by upper-bounding ky
k
−y
k−1
k
2
in a similar way as in the
smooth case, both when µ > 0 and µ = 0.
Finally, the complexity of the inner loop can be obtained directly by combining the
previous proposition with Lemma 11.
Corollary 13 (Inner-loop Complexity for Criterion (C1)) Consider the setting of Propo-
sition 12; then, the sequence (z
t
)
t≥0
minimizing h
k+1
is such that the complexity T
k+1
=
inf{t ≥ 0, h
k+1
(z
t
) − h
∗
k+1
≤ ε
k+1
} satisfies
T
k+1
≤
1
τ
M
log (C
M
C) if µ > 0 =⇒ T
k+1
=
˜
O
1
τ
M
,
where C is the constant defined in (21) or in (22) for the composite case; and
T
k+1
≤
1
τ
M
log
9C
M
(k + 2)
4+η
B
2(f(x
0
) − f
∗
)
if µ = 0 =⇒ T
k+1
=
˜
O
log(k + 2)
τ
M
,
where B is the uniform upper bound in (23). Furthermore, when M is randomized, the
expected complexity E[T
k+1
] is similar, up to a factor 2/τ
M
in the logarithm—see Lemma 11,
and we have E[T
k+1
] =
˜
O(1/τ
M
) when µ > 0 and E[T
k+1
] =
˜
O(log(k + 2)/τ
M
). Here,
˜
O(.)
hides logarithmic dependencies in parameters µ, L, κ, C
M
, τ
M
and f(x
0
) − f
∗
.
4.2.2 Warm Start Strategies for Criterion (C2)
We may now analyze the inner-loop complexity for criterion (C2) leading to upper bounds
with smaller constants and simpler proofs. Note also that in the convex case, the bounded
level set condition will not be needed, unlike for criterion (C1). To proceed, we start with
a simple lemma that gives us a sufficient condition for (C2) to be satisfied.
Lemma 14 (Sufficient condition for criterion (C2)) If a point z satisfies
h
k+1
(z) − h
∗
k+1
≤
δ
k+1
κ
8
kp(y
k
) − y
k
k
2
,
then z is in g
δ
k+1
(y
k
).
24
Catalyst for First-order Convex Optimization
Proof
h
k+1
(z) − h
∗
k+1
≤
δ
k+1
κ
8
kp(y
k
) − y
k
k
2
≤
δ
k+1
κ
4
kp(y
k
) − zk
2
+ kz − y
k
k
2
≤
δ
k+1
κ
4
2
µ + κ
(h
k+1
(z) − h
∗
k+1
) + kz − y
k
k
2
≤
1
2
h
k+1
(z) − h
∗
k+1
+
δ
k+1
κ
4
kz − y
k
k
2
.
Rearranging the terms gives the desired result.
With the previous result, we can control the complexity of the inner-loop minimization
with Lemma 11 by choosing ε =
δ
k+1
κ
8
kp(y
k
) − y
k
k
2
. However, to obtain a meaningful
upper bound, we need to control the ratio
h
k+1
(z
0
) − h
∗
k+1
ε
=
8(h
k+1
(z
0
) − h
∗
k+1
)
δ
k+1
κkp(y
k
) − y
k
k
2
.
Proposition 15 (Warm start for criterion (C2)) Assume that M is linearly conver-
gent for strongly convex problems with parameter τ
M
according to (12), or according to (13)
in the randomized case. At iteration k + 1 of Algorithm 2, given the previous iterate x
k
in g
δ
k
(y
k−1
), we consider the following function
h
k+1
(z) = f (z) +
κ
2
kz − y
k
k
2
,
which we minimize with M, producing a sequence (z
t
)
t≥0
. Then,
• when f is smooth, set z
0
= y
k
;
• when f = f
0
+ ψ is composite, set z
0
= [y
k
]
η
= prox
ηψ
(y
k
−η∇f
0
(y
k
)) with η =
1
L+κ
.
Then,
h
k+1
(z
0
) − h
∗
k+1
≤
L + κ
2
kp(y
k
) − y
k
k
2
. (26)
Proof When f is smooth, the optimality conditions of p(y
k
) yield ∇h
k+1
(p(y
k
)) = ∇f(p(y
k
))+
κ(p(y
k
) − y
k
) = 0. As a result,
h
k+1
(z
0
) − h
∗
k+1
= f(y
k
) −
f(p(y
k
)) +
κ
2
kp(y
k
) − y
k
k
2
≤ f (p(y
k
)) + h∇f(p(y
k
)), y
k
− p(y
k
)i +
L
2
ky
k
− p(y
k
)k
2
−
f(p(y
k
)) +
κ
2
kp(y
k
) − y
k
k
2
=
L + κ
2
kp(y
k
) − y
k
k
2
.
25
Lin, Mairal and Harchaoui
When f is composite, we use the inequality in Lemma 2.3 of Beck and Teboulle (2009): for
any z,
h
k+1
(z) − h
k+1
(z
0
) ≥
L + κ
2
kz
0
− y
k
k
2
+ (L + κ)hz
0
− y
k
, y
k
− zi,
Then, we apply this inequality with z = p(y
k
), and thus,
h
k+1
(z
0
) − h
∗
k+1
≤ −
L + κ
2
kz
0
− y
k
k
2
− (L + κ)hz
0
− y
k
, y
k
− p(y
k
)i
≤
L + κ
2
kp(y
k
) − y
k
k
2
.
We are now in shape to derive a complexity bound for criterion (C2), which is obtained
by combining directly Lemma 11 with the value ε =
δ
k+1
κ
8
kp(y
k
) − y
k
k
2
, Lemma 14, and
the previous proposition.
Corollary 16 (Inner-loop Complexity for Criterion (C2)) Consider the setting of Propo-
sition 15 when M is deterministic; assume further that α
0
and (δ
k
)
k≥0
are chosen according
to Proposition 8 for µ > 0, or Proposition 9 for µ = 0.
Then, the sequence (z
t
)
t≥0
is such that the complexity T
k+1
= inf{t ≥ 0, z
t
∈ g
δ
k+1
(y
k
)}
satisfies
T
k+1
≤
1
τ
M
log
4C
M
(L + κ)
κ
2 −
√
q
√
q
when µ > 0,
and
T
k+1
≤
1
τ
M
log
4C
M
(L + κ)
κ
(k + 2)
2
when µ = 0.
When M is randomized, the expected complexity is similar, up to a factor 2/τ
M
in the
logarithm—see Lemma 11, and we have E[T
k+1
] =
˜
O(1/τ
M
) when µ > 0 and E[T
k+1
] =
˜
O(log(k + 2)/τ
M
).
The inner-loop complexity is asymptotically similar with criterion (C2) as with criterion (C1),
but the constants are significantly better.
4.3 Global Complexity Analysis
In this section, we combine the previous outer-loop and inner-loop convergence results
to derive a global complexity bound. We treat here the strongly convex (µ > 0) and
convex (µ = 0) cases separately.
4.3.1 Strongly Convex Case
When the problem is strongly convex, we remark that the subproblems are solved in a
constant number of iterations T
k
= T =
˜
O
1
τ
M
for both criteria (C1) and (C2). This means
that the iterate x
k
in Algorithm 2 is obtained after s = kT iterations of the method M.
Thus, the true convergence rate of Catalyst applied to M is of the form
f
s
− f
∗
= f
x
s
T
− f
∗
≤ C
0
(1 − ρ)
s
T
(f(x
0
) − f
∗
) ≤ C
0
1 −
ρ
T
s
(f(x
0
) − f
∗
), (27)
26
Catalyst for First-order Convex Optimization
where f
s
= f(x
k
) is the function value after s iterations of M. Then, choosing κ consists
of maximizing the rate of convergence (27). In other words, we want to maximize
√
q/T =
˜
O(
√
qτ
M
). Since q =
µ
µ+κ
, this naturally lead to the maximization of τ
M
/
√
µ + κ. We now
state more formally the global convergence result in terms of complexity.
Proposition 17 (Global Complexity for strongly convex objectives) When f is µ-
strongly convex and all parameters are chosen according to Propositions 5 and 12 when using
criterion (C1), or Propositions 8 and 15 for (C2), then Algorithm 2 finds a solution ˆx such
that f(ˆx) − f
∗
≤ ε in at most N
M
iterations of a deterministic method M with
1. when criterion (C1) is used,
N
M
≤
1
τ
M
ρ
log (C
M
C) · log
8(f(x
0
) − f
∗
)
(
√
q − ρ)
2
ε
=
˜
O
1
τ
M
√
q
log
1
ε
,
where ρ = 0.9
√
q and C is the constant defined in (21) or (22) for the composite case;
2. when criterion (C2) is used,
N
M
≤
2
τ
M
√
q
log
4C
M
L + κ
κ
2 −
√
q
√
q
·log
2(f(x
0
) − f
∗
)
ε
=
˜
O
1
τ
M
√
q
log
1
ε
.
Note that similar results hold in terms of expected number of iterations when the method M
is randomized (see the end of Proposition 12).
Proof Let K be the number of iterations of the outer-loop algorithm required to obtain
an ε-accurate solution. From Proposition 5, using (C1) criterion yields
K ≤
1
ρ
log
8(f(x
0
) − f
∗
)
(
√
q − ρ)
2
ε
.
From Proposition 8, using (C2) criterion yields
K ≤
2
√
q
log
2(f(x
0
) − f
∗
)
ε
.
Then since the number of runs of M is constant for any inner loop, the total number N
M
is given by KT where T is respectively given by Corollaries 13 and 16.
4.3.2 Convex, but not Strongly Convex Case
When µ = 0, the number of iterations for solving each subproblems grows logarithmically,
which means that the iterate x
k
in Algorithm 2 is obtained after s =≤ kT log(k + 2)
iterations of the method M, where T is a constant. By using the global iteration counter
s = kT log(k + 2), we finally have
f
s
− f
∗
≤ C
0
log
2
(s)
s
2
f(x
0
) − f
∗
+
κ
2
kx
0
− x
∗
k
2
. (28)
This rate is near-optimal, up to a logarithmic factor, when compared to the optimal rate
O(1/s
2
). This may be the price to pay for using a generic acceleration scheme. As before,
we detail the global complexity bound for convex objectives in the next proposition.
27
Lin, Mairal and Harchaoui
Proposition 18 (Global complexity for convex objectives) When f is convex and
all parameters are chosen according to Propositions 6 and 12 when using criterion (C1),
or Propositions 9 and 15 for criterion (C2), then Algorithm 2 finds a solution ˆx such that
f(ˆx) − f
∗
≤ ε in at most N
M
iterations of a deterministic method M with
1. when criterion (C1) is applied
N
M
≤
1
τ
M
K log
9C
M
BK
4+γ
2(f(x
0
) − f
∗
)
=
˜
O
1
τ
M
r
κ
ε
log
1
ε
,
where,
K
ε
=
v
u
u
t
8
κ
2
kx
0
− x
∗
k
2
+
4
γ
2
(f(x
0
) − f
∗
)
ε
;
2. when criterion (C2) is applied,
N
M
≤
1
τ
M
r
4κkx
0
− x
∗
k
2
ε
log
16C
M
(L + κ)kx
0
− x
∗
k
2
ε
=
˜
O
1
τ
M
r
κ
ε
log
1
ε
.
Note that similar results hold in terms of expected number of iterations when the method M
is randomized (see the end of Proposition 15).
Proof Let K denote the number of outer-loop iterations required to achieve an ε-accurate
solution. From Proposition 6, when (C1) is applied, we have
K ≤
v
u
u
t
8
κ
2
kx
0
− x
∗
k
2
+
4
γ
2
(f(x
0
) − f
∗
)
ε
.
From Proposition 9, when (C2) is applied, we have
K ≤
r
4κkx
0
− x
∗
k
2
ε
.
Since the number of runs in the inner loop is increasing, we have
N
M
=
K
X
i=1
T
i
≤ KT
K
.
Respectively apply T
K
obtained from Corollary 13 and Corollary 16 gives the result.
Theoretical foundations of the choice of κ. The parameter κ plays an important rule
in the global complexity result. The linear convergence parameter τ
M
depends typically on
κ since it controls the strong convexity parameter of the subproblems. The natural way to
choose κ is to minimize the global complexity given by Proposition 17 and Proposition 18,
which leads to the following rule
28
Catalyst for First-order Convex Optimization
Choose κ to maximize
τ
M
√
µ + κ
,
where µ = 0 when the problem is convex but not strongly convex. We now illustrate
two examples when applying Catalyst to the classical gradient descent method and to the
incremental approach SVRG.
Gradient descent. When M is the gradient descent method, we have
τ
M
=
µ + κ
L + κ
.
Maximizing the ratio
τ
M
√
µ + κ
gives
κ = L − 2µ, when L > 2µ.
Consequently, the complexity in terms of gradient evaluations for minimizing the finite
sum (2), where each iteration of M cost n gradients, is given by
N
M
=
˜
O
n
q
L
µ
log
1
ε
when µ > 0;
˜
O
n
q
L
ε
log
1
ε
when µ = 0.
These rates are near-optimal up to logarithmic constants according to the first-order lower
bound (Nemirovskii and Yudin, 1983; Nesterov, 2004).
SVRG. For SVRG (Xiao and Zhang, 2014) applied to the same finite-sum objective,
τ
M
=
1
n +
¯
L+κ
µ+κ
.
Thus, maximizing the corresponding ratio gives
κ =
¯
L − µ
n + 1
− µ, when
¯
L > (n + 2)µ.
Consequently, the resulting global complexity, here in terms of expected number of gradient
evaluations, is given by
E[N
M
] =
˜
O
q
n
¯
L
µ
log
1
ε
when µ > 0;
˜
O
q
n
¯
L
ε
log
1
ε
when µ = 0.
Note that we treat here only the case
¯
L > (n + 2)µ to simplify, see Table 1 for a general
results. We also remark that Catalyst can be applied to similar incremental algorithms
such as SAG/SAGA (Schmidt et al., 2017; Defazio et al., 2014a) or dual-type algorithm
MISO/Finito (Mairal, 2015; Defazio et al., 2014b) or SDCA Shalev-Shwartz and Zhang
(2012). Moreover, the resulting convergence rates are near-optimal up to logarithmic con-
stants according to the first-order lower bound (Woodworth and Srebro, 2016; Arjevani and
Shamir, 2016).
29

Lin, Mairal and Harchaoui
4.3.3 Practical Aspects of the Theoretical Analysis
So far, we have not discussed the fixed budget criterion mentioned in Section 3. The
idea is quite natural and simple to implement: we predefine the number of iterations to
run for solving each subproblems and stop worrying about the stopping condition. For
example, when µ > 0 and M is deterministic, we can simply run T
M
iterations of M for
each subproblem where T
M
is greater than the value given by Corollaries 13 or 16, then
the criterions (C1) and (C2) are guaranteed to be satisfied. Unfortunately, the theoretical
bound of T
M
is relatively poor and does not lead to a practical strategy. On the other hand,
using a more aggressive strategy such as T
M
= n for incremental algorithms, meaning one
pass over the data, seems to provide outstanding results, as shown in the experimental part
of this paper.
Finally, one could argue that choosing κ according to a worst-case convergence analysis
is not necessarily a good choice. In particular, the convergence rate of the method M,
driven by the parameter τ
M
is probably often under estimated in the first place. This
suggests that using a smaller value for κ than the one we have advocated earlier is a good
thing. In practice, we have observed that indeed Catalyst is often robust to smaller values
of κ than the theoretical one, but we have also observed that the theoretical value performs
reasonably well, as we shall see in the next section.
5. Experimental Study
In this section, we conduct various experiments to study the effect of the Catalyst accel-
eration and its different variants, showing in particular how to accelerate SVRG, SAGA,
and MISO. In Section 5.1, we describe the data sets and formulations considered for our
evaluation, and in Section 5.2, we present the different variants of Catalyst. Then, we
study different questions: which variant of Catalyst should we use for incremental ap-
proaches? (Section 5.3); how do various incremental methods compare when accelerated
with Catalyst? (Section 5.4); what is the effect of Catalyst on the test error when Catalyst
is used to minimize a regularized empirical risk? (Section 5.5); is the theoretical value
for κ appropriate? (Section 5.6). The code used for all our experiments is available at
https://github.com/hongzhoulin89/Catalyst-QNing/.
5.1 Data sets, Formulations, and Metric
Data sets. We consider six machine learning data sets with different characteristics in
terms of size and dimension to cover a variety of situations.
name covtype alpha real-sim rcv1 MNIST-CKN CIFAR-CKN
n 581 012 250 000 72 309 781 265 60 000 50 000
d 54 500 20 958 47 152 2 304 9 216
While the first four data sets are standard ones that were used in previous work about
optimization methods for machine learning, the last two are coming from a computer vision
application. MNIST and CIFAR-10 are two image classification data sets involving 10
classes. The feature representation of each image was computed using an unsupervised
30

Catalyst for First-order Convex Optimization
convolutional kernel network Mairal (2016). We focus here on the the task of classifying
class #1 vs. the rest of the data set.
Formulations. We consider three common optimization problems in machine learning
and signal processing, which admit a particular structure (large finite sum, composite,
strong convexity). For each formulation, we also consider a training set (b
i
, a
i
)
n
i=1
of n data
points, where the b
i
’s are scalars in {−1, +1} and the a
i
are feature vectors in R
p
. Then,
the goal is to fit a linear model x in R
p
such that the scalar b
i
can be well predicted by the
inner-product ≈ a
>
i
x, or by its sign. Specifically, the three formulations we consider are
listed below.
• `
2
2
-regularized Logistic Regression:
min
x∈R
p
1
n
n
X
i=1
log
1 + exp(−b
i
a
T
i
x)
+
µ
2
kxk
2
,
which leads to a µ-strongly convex smooth optimization problem.
• `
1
-regularized Linear Regression (LASSO):
min
x∈R
p
1
2n
n
X
i=1
(b
i
− a
T
i
x)
2
+ λkxk
1
,
which is non smooth and convex but not strongly convex.
• `
1
− `
2
2
-regularized Linear Regression (Elastic-Net):
min
x∈R
p
1
2n
n
X
i=1
(b
i
− a
T
i
x)
2
+ λkxk
1
+
µ
2
kxk
2
,
which is based on the Elastic-Net regularization (Zou and Hastie, 2005) and leading
to a strongly-convex optimization problem.
Each feature vector a
i
is normalized, and a natural upper-bound on the Lipschitz constant L
of the un-regularized objective can be easily obtained with L
logistic
= 1/4 and L
lasso
= 1.
The regularization parameter µ and λ are choosing in the following way:
• For Logistic Regression, we find an optimal regularization parameter µ
∗
by 10-fold
cross validation for each data set on a logarithmic grid 2
i
/n, with i ∈ [−12, 3]. Then,
we set µ = µ
∗
/2
3
which corresponds to a small value of the regularization parameter
and a relatively ill-conditioned problem.
• For Elastic-Net, we set µ = 0.01/n to simulate the ill-conditioned situation and add
a small l
1
-regularization penalty with λ = 1/n that produces sparse solutions.
• For the Lasso problem, we consider a logarithmic grid 10
i
/n, with i = −3, −2, . . . , 3,
and we select the parameter λ that provides a sparse optimal solution closest to 10%
non-zero coefficients, which leads to λ = 10/n or 100/n.
Note that for the strongly convex problems, the regularization parameter µ yields a lower
bound on the strong convexity parameter of the problem.
31
Lin, Mairal and Harchaoui
Metric used. In this chapter, and following previous work about incremental meth-
ods (Schmidt et al., 2017), we plot objective values as a function of the number of gradients
evaluated during optimization, which appears to be the computational bottleneck of all pre-
viously mentioned algorithms. Since no metric is perfect for comparing algorithms’ speed,
we shall make the two following remarks, such that the reader can interpret our results and
the limitations of our study with no difficulty.
• Ideally, CPU-time is the gold standard but CPU time is implementation-dependent
and hardware-dependent.
• We have chosen to count only gradients computed with random data access. Thus,
computing n times a gradient f
i
by picking each time one function at random counts as
“n gradients”, whereas we ignore the cost of computing a full gradient (1/n)
P
n
i=1
∇f
i
at once, where the f
i
’s can be accessed in sequential order. Similarly, we ignore the cost
of computing the function value f(x) = (1/n)
P
n
i=1
f
i
(x), which is typically performed
every pass on the data when computing a duality gap. While this assumption may
be inappropriate in some contexts, the cost of random gradient computations was
significantly dominating the cost of sequential access in our experiments, where (i)
data sets fit into memory; (ii) computing full gradients was done in C++ by calling
BLAS2 functions exploiting multiple cores.
5.2 Choice of Hyper-parameters and Variants
Before presenting the numerical results, we discuss the choice of default parameters used in
the experiments as well as different variants.
Choice of method M. We consider the acceleration of incremental algorithms which
are able to adapt to the problem structure we consider: large sum of functions and possibly
non-smooth regularization penalty.
• The proximal SVRG algorithm of Xiao and Zhang (2014) with stepsize η = 1/L.
• The SAGA algorithm Defazio et al. (2014a) with stepsize η = 1/3L.
• The proximal MISO algorithm of Lin et al. (2015a).
Choice of regularization parameter κ. As suggested by the theoretical analysis, we
take κ to minimize the global complexity, leading to the choice
κ =
L − µ
n + 1
− µ.
Stopping criteria for the inner loop. The choice of the accuracies are driven from the
theoretical analysis described in paragraph 3. Here, we specify it again for the clarity of
presentation:
• Stopping criterion (C1). Stop when h
k
(z
t
) − h
∗
k
≤ ε
k
, where
ε
k
=
5
1
2
(1 − ρ)
k
f(x
0
) with ρ = 0.9
q
µ
µ+κ
when µ > 0;
f(x
0
)
2(k+1)
4.1
when µ = 0.
32
Catalyst for First-order Convex Optimization
The duality gap h(w
t
)−h
∗
can be estimated either by evaluating the Fenchel conjugate
function or by computing the squared norm of the gradient.
• Stopping criterion (C2). Stop when h
k
(z
t
) − h
∗
k
≤ δ
k
·
κ
2
kz
t
− y
k−1
k
2
, where
δ
k
=
√
q
2−
√
q
with q =
µ
µ+κ
when µ > 0;
1
(k+1)
2
when µ = 0.
• Stopping criterion (C3) . Perform exactly one pass over the data in the inner loop
without checking any stopping criteria.
4
Warm start for the inner loop. This is an important point to achieve acceleration
which was not highlighted in the conference paper (Lin et al., 2015a). At iteration k + 1,
we consider the minimization of
h
k+1
(z) = f
0
(z) +
κ
2
kz − y
k
k
2
+ ψ(z).
We warm start according to the strategy defined in Section 3. Let x
k
be the approximate
minimizer of h
k
, obtained from the last iteration.
• Initialization for (C1). Let us define η =
1
L+κ
, then initialize at
z
C1
0
=
(
w
0
, x
k
+
κ
κ+µ
(y
k
− y
k−1
) if ψ = 0;
[w
0
]
η
otherwise.
where [w
0
]
η
= prox
ηψ
(w
0
− ηg) with g = ∇f
0
(w
0
) + κ(w
0
− y
k
).
• Initialization for (C2). Intialize at
z
C2
0
=
(
y
k
if ψ = 0;
[y
k
]
η
= prox
ηψ
(y
k
− η∇f
0
(y
k
)) otherwise.
• Initialization for (C3). Take the best initial point among x
k
and z
C1
0
z
C3
0
such that h
k
(z
C3
0
) = min{h
k
(x
k−1
), h
k
(z
C1
0
)}.
• Initialization for (C1
∗
). Use the strategy (C1) with z
C3
0
.
The warm start at z
C3
0
requires to choose the best point between the last iterate x
k
and
the point z
C1
0
. The motivation is that since the one-pass strategy is an aggressive heuristic,
the solution of the subproblems may not be as accurate as the ones obtained with other
criterions. Allowing using the iterate x
k
turned out to be significantly more stable in
practice. Then, it is also natural to use a similar strategy for criterion (C1), which we
call (C1
∗
). Using a similar strategy for (C2) turned out not to provide any benefit in
practice and is thus omitted from the list here.
5. Here we upper bound f(x
0
) − f
∗
by f(x
0
) since f is always positive in our models.
4. This stopping criterion is heuristic since one pass may not be enough to achieve the required accuracy.
What we have shown is that with a large enough T
M
, then the convergence will be guaranteed. Here we
take heuristically T
M
as one pass.
33
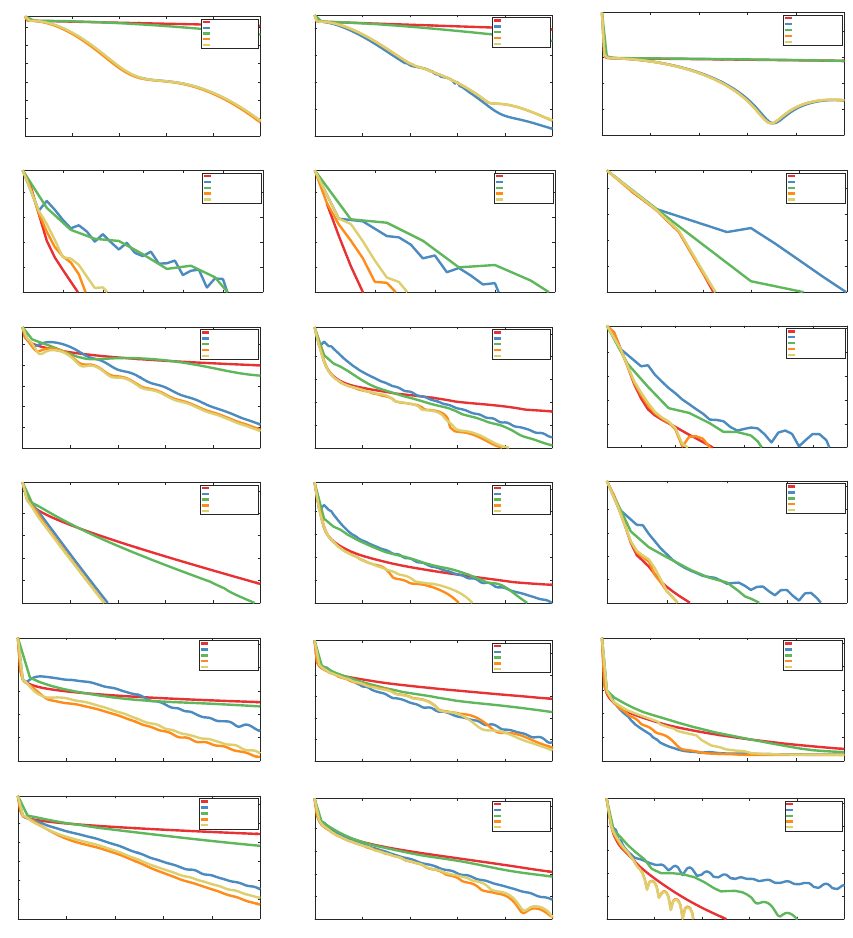
Lin, Mairal and Harchaoui
5.3 Comparison of Stopping Criteria and Warm-start Strategies
First, we evaluate the performance of the previous strategies when applying Catalyst to
SVRG, SAGA and MISO. The results are presented in Figures 1, 2, and 3, respectively.
0 20 40 60 80 100
Number of gradient evaluations
-4
-3.5
-3
-2.5
-2
-1.5
-1
Relative function value gap (log scale)
covtype, logistic, µ= 1/(2
12
n)
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
Relative function value gap (log scale)
covtype, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-6
-5
-4
-3
-2
Relative function value gap (log scale)
covtype, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 5 10 15 20 25 30
Number of gradient evaluations
-10
-8
-6
-4
-2
Relative function value gap (log scale)
alpha, logistic, µ= 1/(2
9
n)
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 5 10 15 20
Number of gradient evaluations
-10
-8
-6
-4
-2
Relative function value gap (log scale)
alpha, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 2 4 6 8 10
Number of gradient evaluations
-10
-8
-6
-4
-2
Relative function value gap (log scale)
alpha, lasso, λ= 100 / n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
real-sim, logistic, µ= 1/(2
8
n)
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
real-sim, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 5 10 15 20 25 30 35
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
real-sim, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
rcv1, logistic, µ= 1/(2
5
n)
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
rcv1, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 10 20 30 40
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
rcv1, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-3
-2
-1
0
1
2
Relative function value gap (log scale)
Image Features from MNIST, logistic, µ= 1/(2
11
n)
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
Image Features from MNIST, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-4
-3
-2
-1
0
1
Relative function value gap (log scale)
Image Features from MNIST, lasso, λ= 1 / n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-5
-4
-3
-2
-1
0
1
Relative function value gap (log scale)
Image Features from CIFAR, logistic, µ= 1/(2
10
n)
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
Image Features from CIFAR, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
Image Features from CIFAR, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1
Catalyst-SVRG C2
Catalyst-SVRG C3
Catalyst-SVRG C1
∗
Figure 1: Experimental study of different stopping criterions for Catalyst-SVRG. We plot
the value f (x
k
)/f
∗
− 1 as a function of the number of gradient evaluations, on a
logarithmic scale; the optimal value f
∗
is estimated with a duality gap.
34

Catalyst for First-order Convex Optimization
Observations for Catalyst-SVRG. We remark that in most of the cases, the curve of
(C3) and (C1
∗
)are superimposed, meaning that one pass through the data is enough for solv-
ing the subproblem up to the required accuracy. Moreover, they give the best performance
among all criterions. Regarding the logistic regression problem, the acceleration is signif-
icant (even huge for the covtype data set) except for alpha, where only (C3) and (C1
∗
)do
not degrade significantly the performance. For sparse problems, the effect of acceleration
is more mitigated, with 7 cases out of 12 exhibiting important acceleration and 5 cases no
acceleration. As before, (C3) and (C1
∗
)are the only strategies that never degrade perfor-
mance.
One reason explaining why acceleration is not systematic may be the ability of incre-
mental methods to adapt to the unknown strong convexity parameter µ
0
≥ µ hidden in the
objective’s loss, or local strong convexity near the solution. When µ
0
/L ≥ 1/n, we indeed
obtain a well-conditioned regime where acceleration should not occur theoretically. In fact
the complexity O(n log(1/ε)) is already optimal in this regime, see Arjevani and Shamir
(2016); Woodworth and Srebro (2016). For sparse problems, conditioning of the problem
with respect to the linear subspace where the solution lies might also play a role, even
though our analysis does not study this aspect. Therefore, this experiment suggests that
adaptivity to unknown strong convexity is of high interest for incremental optimization.
Observations for Catalyst-SAGA. Our conclusions with SAGA are almost the same
as with SVRG. However, in a few cases, we also notice that criterion C1 lacks stability,
or at least exhibits some oscillations, which may suggest that SAGA has a larger variance
compared to SVRG. The difference in the performance of (C1) and (C1
∗
)can be huge, while
they differ from each other only by the warm start strategy. Thus, choosing a good initial
point for solving the sub-problems is a key for obtaining acceleration in practice.
Observations for Catalyst-MISO. The warm-start strategy of MISO is different from
primal algorithms because parameters for the dual function need to be specified. The most
natural way for warm starting the dual functions is to set
d
k+1
(x) = d
k
(x) +
κ
2
kx − y
k
k
2
−
κ
2
kx − y
k−1
k
2
,
where d
k
is the last dual function of the previous subproblem h
k
. This gives the warm start
z
0
= prox
x
k
+
κ
κ + µ
(y
k
− y
k−1
)
.
For other choices of z
0
, the dual function needs to be recomputed from scratch, which is com-
putationally expensive and unstable for ill-conditioned problems. Thus, we only present the
experimental results with respect to criterion (C1) and the one-pass heuristic (C3) . As we
observe, a huge acceleration is obtained in logistic regression and Elastic-net formulations.
For Lasso problem, the original Prox-MISO is not defined since the problem is not strongly
convex. Thus, in order to make a comparison, we compare with Catalyst-SVRG which
shows that the acceleration achieves a similar performance. This aligns with the theoretical
result stating that Catalyst applied to incremental algorithms yields a similar convergence
rate. Notice also that the original MISO algorithm suffers from numerical stability in this
ill-conditioned regime chosen for our experiments. Catalyst not only accelerates MISO, but
it also stabilizes it.
35
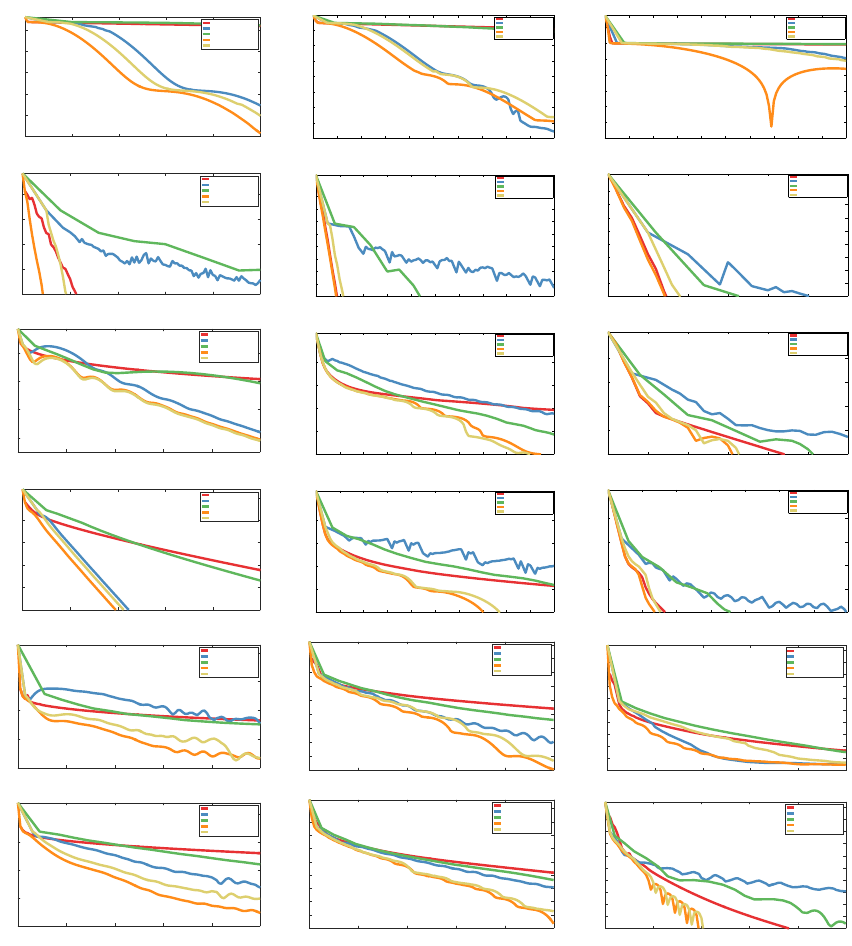
Lin, Mairal and Harchaoui
0 20 40 60 80 100
Number of gradient evaluations
-3.5
-3
-2.5
-2
-1.5
-1
Relative function value gap (log scale)
covtype, logistic, µ= 1/(2
12
n)
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 10 20 30 40 50 60 70 80 90 100
−9
−8
−7
−6
−5
−4
−3
−2
Number of gradient evaluations
Relative function value gap
covtype, elasticnet, µ=1/100 n, λ=1/n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 10 20 30 40 50 60 70 80 90 100
−9
−8
−7
−6
−5
−4
−3
−2
Number of gradient evaluations
Relative function value gap
covtype, lasso, λ= 10 / n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
Relative function value gap (log scale)
alpha, logistic, µ= 1/(2
9
n)
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 10 20 30 40 50 60 70 80 90 100
−10
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
alpha, elasticnet, µ=1/100 n, λ=1/n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 5 10 15 20 25 30
−10
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
alpha, lasso, λ= 100 / n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-6
-4
-2
0
Relative function value gap (log scale)
real-sim, logistic, µ= 1/(2
8
n)
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
real-sim, elasticnet, µ=1/100 n, λ=1/n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 5 10 15 20 25 30
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
real-sim, lasso, λ= 10 / n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
rcv1, logistic, µ= 1/(2
5
n)
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
rcv1, elasticnet, µ=1/100 n, λ=1/n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 10 20 30 40 50 60 70
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
rcv1, lasso, λ= 10 / n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-2
-1
0
1
2
Relative function value gap (log scale)
Image Features from MNIST, logistic, µ= 1/(2
11
n)
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-8
-7
-6
-5
-4
-3
-2
-1
0
1
Relative function value gap (log scale)
Image Features from MNIST, elasticnet, µ=1/100 n, λ=1/n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Relative function value gap (log scale)
Image Features from MNIST, lasso, λ= 1 / n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-3
-2
-1
0
1
Relative function value gap (log scale)
Image Features from CIFAR, logistic, µ= 1/(2
10
n)
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap (log scale)
Image Features from CIFAR, elasticnet, µ=1/100 n, λ=1/n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
0 20 40 60 80 100
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap (log scale)
Image Features from CIFAR, lasso, λ= 10 / n
SAGA
Catalyst-SAGA C1
Catalyst-SAGA C2
Catalyst-SAGA C3
Catalyst-SAGA C1
∗
Figure 2: Experimental study of different stopping criterions for Catalyst-SAGA, with a
similar setting as in Figure 1.
36
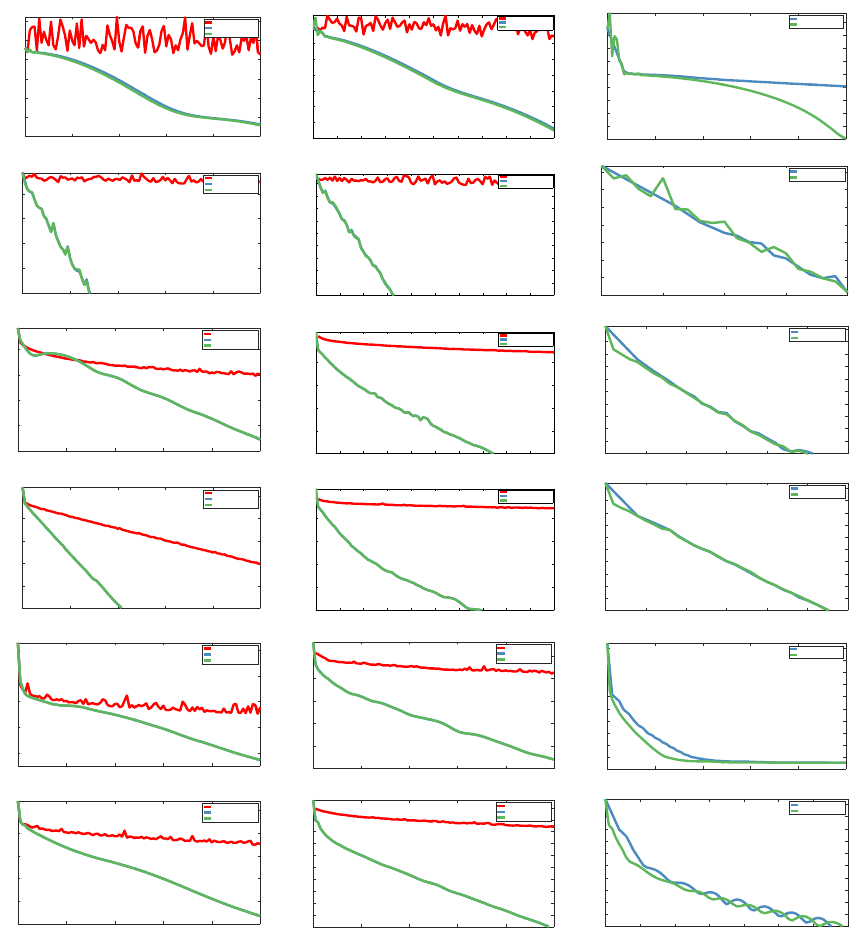
Catalyst for First-order Convex Optimization
0 20 40 60 80 100
Number of gradient evaluations
-3
-2.5
-2
-1.5
-1
-0.5
0
Relative function value gap
covtype, logistic, µ= 1/(2
12
n)
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 10 20 30 40 50 60 70 80 90 100
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
covtype, elasticnet, µ=1/100 n, λ=1/n
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-5.5
-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
Relative function value gap
covtype, lasso, λ= 10 / n
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
Relative function value gap
alpha, logistic, µ= 1/(2
9
n)
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 10 20 30 40 50 60 70 80 90 100
−10
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
alpha, elasticnet, µ=1/100 n, λ=1/n
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 5 10 15 20
Number of gradient evaluations
-8
-7
-6
-5
-4
-3
-2
-1
Relative function value gap
alpha, lasso, λ= 100 / n
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-8
-6
-4
-2
0
Relative function value gap
real-sim, logistic, µ= 1/(2
8
n)
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
real-sim, elasticnet, µ=1/100 n, λ=1/n
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 5 10 15 20 25 30
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
real-sim, lasso, λ= 10 / n
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap
rcv1, logistic, µ= 1/(2
5
n)
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
rcv1, elasticnet, µ=1/100 n, λ=1/n
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 5 10 15 20 25 30
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
rcv1, lasso, λ= 10 / n
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-2
-1
0
1
2
Relative function value gap
Image Features from MNIST, logistic, µ= 1/(2
11
n)
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap
Image Features from MNIST, elasticnet, µ=1/100 n, λ=1/n
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Relative function value gap
Image Features from MNIST, lasso, λ= 1 / n
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-4
-3
-2
-1
0
1
Relative function value gap
Image Features from CIFAR, logistic, µ= 1/(2
10
n)
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 20 40 60 80 100
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
Image Features from CIFAR, elasticnet, µ=1/100 n, λ=1/n
MISO
Catalyst-MISO C1
Catalyst-MISO C3
0 10 20 30 40 50 60 70
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
Image Features from CIFAR, lasso, λ= 10 / n
Catalyst-MISO C1
Catalyst-MISO C3
Figure 3: Experimental study of different stopping criterions for Catalyst-MISO, with a
similar setting as in Figure 1
37
Lin, Mairal and Harchaoui
5.4 Acceleration of Existing Methods
Then, we put the previous curves into perspective and make a comparison of the perfor-
mance before and after applying Catalyst across methods. We show the best performance
among the three developed stopping criteria, which corresponds to be (C3) .
Observations. In Figure 4, we observe that by applying Catalyst, we accelerate the
original algorithms up to the limitations discussed above (comparing the dashed line and
the solid line of the same color). In three data sets (covtype, real-sim and rcv1), significant
improvements are achieved as expected by the theory for the ill-conditioned problems in
logistic regression and Elastic-net. For data set alpha, we remark that an relative accuracy
in the order 10
−10
is attained in less than 10 iterations. This suggests that the problems is
in fact well-conditioned and there is some hidden strong convexity for this data set. Thus,
the incremental algorithms like SVRG or SAGA are already optimal under this situation
and no further improvement can be obtained by applying Catalyst.
5.5 Empirical Effect on the Generalization Error
A natural question that applies to all incremental methods is whether or not the acceleration
that we may see for minimizing an empirical risk on training data affects the objective
function and the test accuracy on new unseen test data. To answer this question, we
consider the logistic regression formulation with the regularization parameter µ
∗
obtained
by cross-validation. Then, we cut each data set into 80% of training data and set aside 20%
of the data point as test data.
Observations on the test loss and test accuracy. The left column of Figure 5 shows
the loss function on the training set, where acceleration is significant in 5 cases out of 6. The
middle column shows the loss function evaluated on the test set, but on a non-logarithmic
scale since the optimal value of the test loss is unknown. Acceleration appears in 4 cases
out of 6. Regarding the test accuracy, an important acceleration is obtained in 2 cases,
whereas it is less significant or negligible in the other cases.
5.6 Study of the Parameter κ
Finally, we evaluate the performance for different values of κ.
Observations for different choices of κ. We consider a logarithmic grid κ = 10
i
κ
0
with i = −2, −1, ··· , 2 and κ
0
is the optimal κ given by the theory. We observe that for ill-
conditioned problems, using optimal choice κ
0
provides much better performance than other
choices, which confirms the theoretical result. For the data set of alpha or Lasso problems,
we observe that the best choice is given by the smallest κ = 0.01κ
0
. This suggests that, as
discussed before, there is a certain degree of strong convexity present in the objective even
without any regularization.
6. Conclusion
We have introduced a generic algorithm called Catalyst that allows us to extend Nesterov’s
acceleration to a large class of first-order methods. We have shown that it can be effective
38
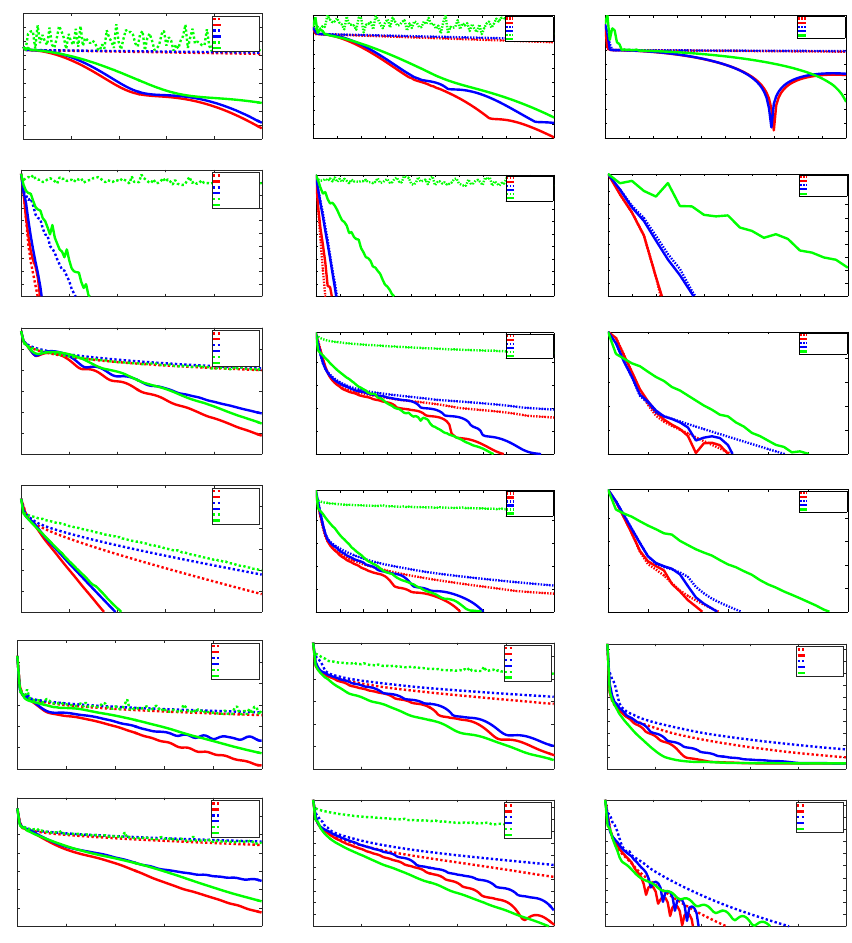
Catalyst for First-order Convex Optimization
0 20 40 60 80 100
Number of gradient evaluations
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Relative function value gap
covtype, logistic, µ= 1/(2
12
n)
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 10 20 30 40 50 60 70 80 90 100
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
covtype, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 10 20 30 40 50 60 70 80 90 100
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
covtype, lasso, λ= 10 / n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
alpha, logistic, µ= 1/(2
9
n)
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 10 20 30 40 50 60 70 80 90 100
−10
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
alpha, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 2 4 6 8 10 12 14 16 18 20
−10
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
alpha, lasso, λ= 100 / n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
2
Relative function value gap
real-sim, logistic, µ= 1/(2
8
n)
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
real-sim, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 5 10 15 20 25 30
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
real-sim, lasso, λ= 10 / n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
2
Relative function value gap
rcv1, logistic, µ= 1/(2
5
n)
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
rcv1, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 5 10 15 20 25 30
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
rcv1, lasso, λ= 10 / n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-3
-2
-1
0
1
2
3
Relative function value gap
mnist, logistic, µ= 1/(2
11
n)
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap
mnist, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Relative function value gap
mnist, lasso, λ= 1 / n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-5
-4
-3
-2
-1
0
1
2
Relative function value gap
hongzhou, logistic, µ= 1/(2
10
n)
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
hongzhou, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
MISO
Catalyst-MISO
0 20 40 60 80 100
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
hongzhou, lasso, λ= 10 / n
SVRG
Catalyst-SVRG
SAGA
Catalyst-SAGA
Catalyst-MISO
Figure 4: Experimental study of the performance of Catalyst applying to SVRG, SAGA and
MISO. The dashed lines correspond to the original algorithms and the solid lines
correspond to accelerated algorithms by applying Catalyst. We plot the relative
function value gap (f (x
k
) − f
∗
)/f
∗
in the number of gradient evaluations, on a
logarithmic scale.
39
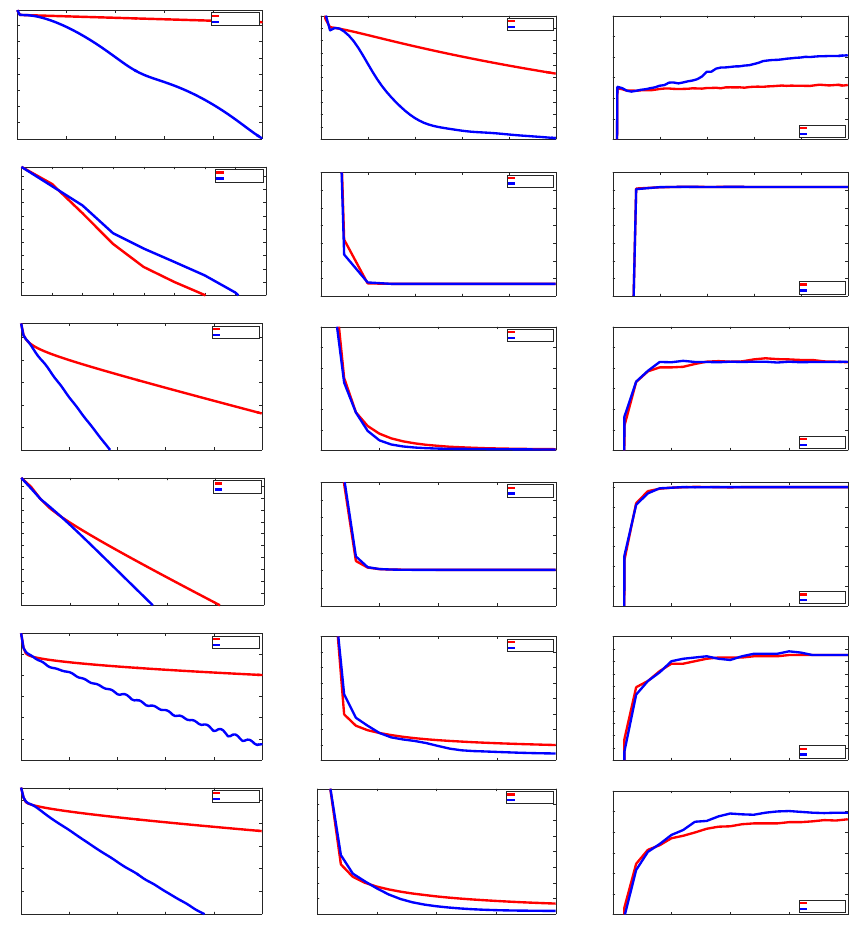
Lin, Mairal and Harchaoui
0 20 40 60 80 100
Number of gradient evaluations
-9
-8
-7
-6
-5
-4
-3
-2
Relative function value gap (log scale)
covtype, logistic, µ= 0.00195312/n
SVRG
Catalyst-SVRG
0 10 20 30 40 50
Number of gradient evaluations
0.66
0.661
0.662
0.663
0.664
0.665
0.666
0.667
0.668
0.669
0.67
Test loss
covtype, logistic, µ= 0.00195312/n
SVRG
Catalyst-SVRG
0 10 20 30 40 50
Number of gradient evaluations
0.58
0.585
0.59
0.595
0.6
0.605
0.61
Test Accuracy
covtype, logistic, µ= 0.00195312/n
SVRG
Catalyst-SVRG
0 1 2 3 4 5 6 7 8
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
Relative function value gap (log scale)
alpha, logistic, µ= 0.015625/n
SVRG
Catalyst-SVRG
0 2 4 6 8 10
Number of gradient evaluations
0.465
0.47
0.475
0.48
0.485
0.49
0.495
0.5
Test loss
alpha, logistic, µ= 0.015625/n
SVRG
Catalyst-SVRG
0 2 4 6 8 10
Number of gradient evaluations
0.75
0.755
0.76
0.765
0.77
0.775
0.78
0.785
Test Accuracy
alpha, logistic, µ= 0.015625/n
SVRG
Catalyst-SVRG
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
real-sim, logistic, µ= 0.03125/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.07
0.075
0.08
0.085
0.09
0.095
0.1
Test loss
real-sim, logistic, µ= 0.03125/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.95
0.955
0.96
0.965
0.97
0.975
0.98
Test Accuracy
real-sim, logistic, µ= 0.03125/n
SVRG
Catalyst-SVRG
0 5 10 15 20 25
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap (log scale)
rcv1, logistic, µ= 0.25/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.128
0.129
0.13
0.131
0.132
0.133
0.134
0.135
Test loss
rcv1, logistic, µ= 0.25/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.94
0.942
0.944
0.946
0.948
0.95
0.952
Test Accuracy
rcv1, logistic, µ= 0.25/n
SVRG
Catalyst-SVRG
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
Image feature from MNIST, logistic, µ= 0.00390625/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Test loss
Image feature from MNIST, logistic, µ= 0.00390625/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.99
0.991
0.992
0.993
0.994
0.995
0.996
0.997
0.998
0.999
1
Test Accuracy
Image feature from MNIST, logistic, µ= 0.00390625/n
SVRG
Catalyst-SVRG
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap (log scale)
Image feature from CIFAR, logistic, µ= 0.0078125/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.07
0.08
0.09
0.1
0.11
0.12
0.13
0.14
0.15
Test loss
Image feature from CIFAR, logistic, µ= 0.0078125/n
SVRG
Catalyst-SVRG
0 5 10 15 20
Number of gradient evaluations
0.95
0.955
0.96
0.965
0.97
0.975
0.98
Test Accuracy
Image feature from CIFAR, logistic, µ= 0.0078125/n
SVRG
Catalyst-SVRG
Figure 5: Empirical effect on the generalization error. For a logistic regression experiment,
we report the value of the objective function evaluated on the training data on
the left column, the value of the loss evaluated on a test set on the middle column,
and the classification error evaluated on the test set on the right.
40
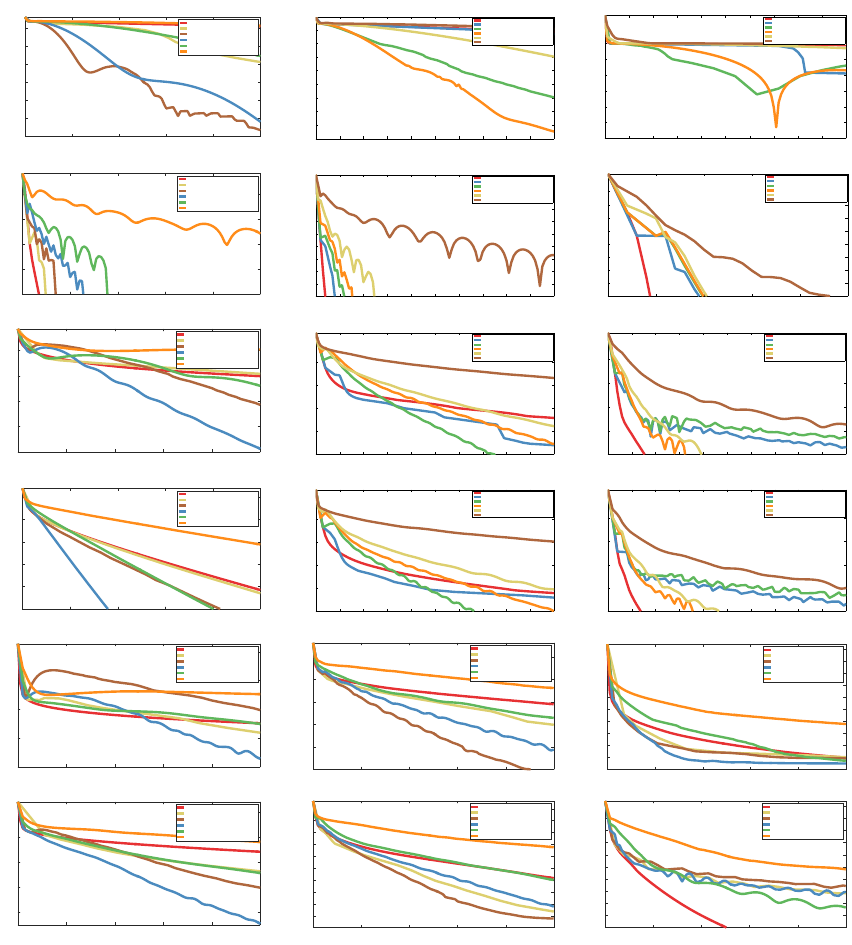
Catalyst for First-order Convex Optimization
0 20 40 60 80 100
Number of gradient evaluations
-4
-3.5
-3
-2.5
-2
-1.5
-1
Relative function value gap
covtype, logistic, µ= 1/(2
12
n)
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 10 20 30 40 50 60 70 80 90 100
−10
−9
−8
−7
−6
−5
−4
−3
−2
Number of gradient evaluations
Relative function value gap
covtype, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 10 20 30 40 50 60 70 80 90 100
−9
−8
−7
−6
−5
−4
−3
−2
Number of gradient evaluations
Relative function value gap
covtype, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
Relative function value gap
alpha, logistic, µ= 1/(2
9
n)
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 10 20 30 40 50 60 70 80 90 100
−10
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
alpha, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 5 10 15 20 25
−10
−9
−8
−7
−6
−5
−4
−3
−2
−1
Number of gradient evaluations
Relative function value gap
alpha, lasso, λ= 100 / n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-8
-6
-4
-2
0
Relative function value gap
real-sim, logistic, µ= 1/(2
8
n)
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
real-sim, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
real-sim, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap
rcv1, logistic, µ= 1/(2
5
n)
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
rcv1, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 10 20 30 40 50 60 70 80 90 100
−10
−8
−6
−4
−2
0
Number of gradient evaluations
Relative function value gap
rcv1, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-2
-1
0
1
2
Relative function value gap
Image Features from MNIST, logistic, µ= 1/(2
11
n)
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-10
-8
-6
-4
-2
0
Relative function value gap
Image Features from MNIST, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Relative function value gap
Image Features from MNIST, lasso, λ= 1 / n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-3
-2
-1
0
1
Relative function value gap
Image Features from CIFAR, logistic, µ= 1/(2
10
n)
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
Image Features from CIFAR, elasticnet, µ=1/100 n, λ=1/n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
0 20 40 60 80 100
Number of gradient evaluations
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Relative function value gap
Image Features from CIFAR, lasso, λ= 10 / n
SVRG
Catalyst-SVRG C1 κ=0.01 κ
0
Catalyst-SVRG C1 κ=0.1 κ
0
Catalyst-SVRG C1 κ=1 κ
0
Catalyst-SVRG C1 κ=10 κ
0
Catalyst-SVRG C1 κ=100 κ
0
Figure 6: Evaluations of Catalyst-SVRG for different κ using stopping criterion C1, where
κ
0
is the theoretical choice given by the complexity analysis.
41
Lin, Mairal and Harchaoui
in practice for ill-conditioned problems. Besides acceleration, Catalyst also improves the
numerical stability of a given algorithm, by applying it to auxiliary problems that are better
conditioned than the original objective. For this reason, it also provides support to convex,
but not strongly convex objectives, to algorithms that originally require strong convexity.
We have also studied experimentally many variants to identify the ones that are the most
effective and the simplest to use in practice. For incremental methods, we showed that
the “almost-parameter-free” variant, consisting in performing a single pass over the data at
every outer-loop iteration, was the most effective one in practice.
Even though we have illustrated Catalyst in the context of finite-sum optimization
problems, the main feature of our approach is its versatility. Catalyst could also be applied
to other algorithms that have not been considered so far and give rise to new accelerated
algorithms.
Acknowledgments
The authors would like to thank Dmitriy Drusvyatskiy, Anatoli Juditsky, Sham Kakade,
Arkadi Nemirovski, Courtney Paquette, and Vincent Roulet for fruitful discussions. Hongzhou
Lin and Julien Mairal were supported by the ERC grant SOLARIS (# 714381) and a grant
from ANR (MACARON project ANR-14-CE23-0003-01). Zaid Harchaoui was supported by
NSF Award CCF-1740551 and the program “Learning in Machines and Brains” of CIFAR.
This work was performed while Hongzhou Lin was at Inria and Univ. Grenoble Alpes.
Appendix A. Useful Lemmas
Lemma 19 (Simple lemma on quadratic functions) For all vectors x, y, z in R
p
and
θ > 0,
kx − yk
2
≥ (1 − θ)kx − zk
2
+
1 −
1
θ
kz − yk
2
.
Proof
kx − yk
2
= kx − z + z − yk
2
= kx − zk
2
+ kz − yk
2
+ 2hx −z, z − yi
= kx − zk
2
+ kz − yk
2
+
√
θ(x − z) +
1
√
θ
(z − y)
2
− θkx − zk
2
−
1
θ
kz − yk
2
≥ (1 − θ)kx − zk
2
+
1 −
1
θ
kz − yk
2
.
Lemma 20 (Simple lemma on non-negative sequences) Consider a increasing sequence
(S
k
)
k≥0
and two non-negative sequences (a
k
)
k≥0
and (u
k
)
k≥0
such that for all k,
u
2
k
≤ S
k
+
k
X
i=1
a
i
u
i
. (29)
42
Catalyst for First-order Convex Optimization
Then,
S
k
+
k
X
i=1
a
i
u
i
≤
p
S
k
+
k
X
i=1
a
i
!
2
. (30)
Proof This lemma is identical to the Lemma A.10 in the original Catalyst paper (Lin
et al., 2015a), inspired by a lemma of Schmidt et al. (2011) for controlling errors of inexact
proximal gradient methods.
We give here an elementary proof for completeness based on induction. The relation (30)
is obviously true for k = 0. Then, we assume it is true for k − 1 and prove the relation
for k. We remark that from (29),
u
k
−
a
k
2
2
≤ S
k
+
k−1
X
i=1
a
i
u
i
+
a
2
k
4
,
and then
u
k
≤
v
u
u
t
S
k
+
k−1
X
i=1
a
i
u
i
+
a
2
k
4
+
a
k
2
.
We may now prove the relation (30) by induction,
S
k
+
k
X
i=1
a
i
u
i
≤ S
k
+
k−1
X
i=1
a
i
u
i
+ a
k
a
k
2
+
v
u
u
t
S
k
+
k−1
X
i=1
a
i
u
i
+
a
2
k
4
≤ S
k
+
k−1
X
i=1
a
i
u
i
+ a
k
a
k
+
v
u
u
t
S
k
+
k−1
X
i=1
a
i
u
i
≤
v
u
u
t
S
k
+
k−1
X
i=1
a
i
u
i
+ a
k
2
=
v
u
u
t
(S
k
− S
k−1
) + (S
k−1
+
k−1
X
i=1
a
i
u
i
) + a
k
2
≤
v
u
u
t
(S
k
− S
k−1
) +
p
S
k−1
+
k−1
X
i=1
a
i
!
2
+ a
k
2
(by induction)
≤
p
S
k
+
k
X
i=1
a
i
!
2
.
The last inequality is obtained by developing the square
q
S
k−1
+
P
k−1
i=1
a
i
2
and use the
increasing assumption S
k−1
≤ S
k
.
43
Lin, Mairal and Harchaoui
Lemma 21 (Growth of the sequence (A
k
)
k≥0
)
Let (A
k
)
k≥0
be the sequence defined in (14) where (α
k
)
k≥0
is produced by (10) with α
0
= 1
and µ = 0. Then, we have the following bounds for all k ≥ 0,
2
(k + 2)
2
≤ A
k
≤
4
(k + 2)
2
.
Proof The righthand side is directly obtained from Lemma 4 by noticing that γ
0
= κ with
the choice of α
0
. Using the recurrence of α
k
, we have for all k ≥ 1,
α
2
k
= (1 − α
k
)α
2
k−1
=
k
Y
i=1
(1 − α
i
)α
2
0
= A
k
≤
4
(k + 2)
2
.
Thus, α
k
≤
2
k+2
for all k ≥ 1 (it is also true for k = 0). We now have all we need to conclude
the lemma:
A
k
=
k
Y
i=1
(1 − α
i
) ≥
k
Y
i=1
1 −
2
i + 2
=
2
(k + 2)(k + 1)
≥
2
(k + 2)
2
.
Appendix B. Proofs of Auxiliary Results
B.1 Proof of Lemma 2
Proof Let us introduce the notation h
0
(z) ,
1
η
(z − [z]
η
) for the gradient mapping at z.
The first order conditions of the convex problem defining [z]
η
give
h
0
(z) − ∇h
0
(z) ∈ ∂ψ([z]
η
).
Then, we may define
u ,
1
η
(z − [z]
η
) − (∇h
0
(z) − ∇h
0
([z]
η
)),
= h
0
(z) − ∇h
0
(z) + ∇h
0
([z]
η
) ∈ ∂h([z]
η
).
Then, by strong convexity,
h
∗
≥ h([z]
η
) + u
>
(p(x) − [z]
η
) +
κ + µ
2
kp(x) − [z]
η
k
2
≥ h([z]
η
) −
1
2(κ + µ)
kuk
2
.
Moreover,
kuk
2
=
1
η
(z − [z]
η
)
2
−
2
η
hz − [z]
η
, ∇h
0
(z) − ∇h
0
([z]
η
)i + k∇h
0
(z) − ∇h
0
([z]
η
)k
2
≤
h
0
(z)
2
− k∇h
0
(z) − ∇h
0
([z]
η
)k
2
≤
h
0
(z)
2
,
44
Catalyst for First-order Convex Optimization
where the first inequality comes from the relation (Nesterov, 2004, Theorem 2.1.5) using
the fact h
0
is (1/η)-smooth
k∇h
0
(z) − ∇h
0
([z]
η
)k
2
≤
1
η
hz − [z]
η
, ∇h
0
(z) − ∇h
0
([z]
η
)i.
Thus,
h([z]
η
) − h
∗
≤
1
2(κ + µ)
kuk
2
≤
1
2(κ + µ)
kh
0
(z)k
2
.
As a result,
kh
0
(z)k ≤
√
2κε ⇒ h([z]
η
) − h
∗
≤ ε.
B.2 Proof of Proposition 5
Proof We simply use Theorem 3 and specialize it to the choice of parameters. The
initialization α
0
=
√
q leads to a particularly simple form of the algorithm, where α
k
=
√
q
for all k ≥ 0. Therefore, the sequence (A
k
)
k≥0
from Theorem 3 is also simple since we
indeed have A
k
= (1 −
√
q)
k
. Then, we remark that γ
0
= µ(1 −
√
q) and thus, by strong
convexity of f,
S
0
= (1 −
√
q)
f(x
0
) − f
∗
+
µ
2
kx
0
− x
∗
k
2
≤ 2(1 −
√
q)(f(x
0
) − f
∗
).
Therefore,
p
S
0
+ 3
k
X
j=1
r
ε
j
A
j−1
≤
q
2(1 −
√
q)(f(x
0
) − f
∗
) + 3
k
X
j=1
r
ε
j
A
j−1
=
q
2(1 −
√
q)(f(x
0
) − f
∗
)
1 +
k
X
j=1
s
1 − ρ
1 −
√
q
!
| {z }
η
j
=
q
2(1 −
√
q)(f(x
0
) − f
∗
)
η
k+1
− 1
η − 1
≤
q
2(1 −
√
q)(f(x
0
) − f
∗
)
η
k+1
η − 1
.
45
Lin, Mairal and Harchaoui
Therefore, Theorem 3 combined with the previous inequality gives us
f(x
k
) − f
∗
≤ 2A
k−1
(1 −
√
q)(f(x
0
) − f
∗
)
η
k+1
η − 1
2
= 2
η
η − 1
2
(1 − ρ)
k
(f(x
0
) − f
∗
)
= 2
√
1 − ρ
√
1 − ρ −
p
1 −
√
q
!
2
(1 − ρ)
k
(f(x
0
) − f
∗
)
= 2
1
√
1 − ρ −
p
1 −
√
q
!
2
(1 − ρ)
k+1
(f(x
0
) − f
∗
).
Since
√
1 − x+
x
2
is decreasing in [0, 1], we have
√
1 − ρ+
ρ
2
≥
p
1 −
√
q +
√
q
2
. Consequently,
f(x
k
) − f
∗
≤
8
(
√
q − ρ)
2
(1 − ρ)
k+1
(f(x
0
) − f
∗
).
B.3 Proof of Proposition 6
Proof The initialization α
0
= 1 leads to γ
0
= κ and S
0
=
κ
2
kx
∗
− x
0
k
2
. Then,
r
γ
0
2
kx
0
− x
∗
k
2
+ 3
k
X
j=1
r
ε
j
A
j−1
≤
r
κ
2
kx
0
− x
∗
k
2
+ 3
k
X
j=1
r
(j + 1)
2
ε
j
2
(from Lemma 21)
≤
r
κ
2
kx
0
− x
∗
k
2
+
p
f(x
0
) − f
∗
k
X
j=1
1
(j + 1)
1+γ/2
,
where the last inequality uses Lemma 21 to upper-bound the ratio ε
j
/A
j
. Moreover,
k
X
j=1
1
(j + 1)
1+γ/2
≤
∞
X
j=2
1
j
1+γ/2
≤
Z
∞
1
1
x
1+γ/2
dx =
2
γ
.
Then applying Theorem 3 yields
f(x
k
) − f
∗
≤ A
k−1
r
κ
2
kx
0
− x
∗
k
2
+
2
γ
p
f(x
0
) − f
∗
2
≤
8
(k + 1)
2
κ
2
kx
0
− x
∗
k
2
+
4
γ
2
(f(x
0
) − f
∗
)
.
The last inequality uses (a + b)
2
≤ 2(a
2
+ b
2
).
46
Catalyst for First-order Convex Optimization
B.4 Proof of Lemma 11
Proof We abbreviate τ
M
by τ and C = C
M
(h(z
0
) − h
∗
) to simplify the notation. Set
T
0
=
1
τ
log
1
1 − e
−τ
C
ε
.
For any t ≥ 0, we have
E[h(z
t
) − h
∗
] ≤ C(1 − τ)
t
≤ C e
−tτ
.
By Markov’s inequality,
P[h(z
t
) − h
∗
> ε] = P[T (ε) > t] ≤
E[h(z
t
) − h
∗
]
ε
≤
C e
−tτ
ε
.
Together with the fact P ≤ 1 and t ≥ 0. We have
P[T (ε) ≥ t + 1] ≤ min
C
ε
e
−tτ
, 1
.
Therefore,
E[T (ε)] =
∞
X
t=1
P[T (ε) ≥ t] =
T
0
X
t=1
P[T (ε) ≥ t] +
∞
X
t=T
0
+1
P[T (ε) ≥ t]
≤ T
0
+
∞
X
t=T
0
C
ε
e
−tτ
= T
0
+
C
ε
e
−T
0
τ
∞
X
t=0
e
−tτ
= T
0
+
C
ε
e
−τT
0
1 − e
−τ
= T
0
+ 1.
A simple calculation shows that for any τ ∈ (0, 1),
τ
2
≤ 1 − e
−τ
and then
E[T (ε)] ≤ T
0
+ 1 =
1
τ
log
1
1 − e
−τ
C
ε
+ 1 ≤
1
τ
log
2C
τε
+ 1.
B.5 Proof of coerciveness property of the proximal operator
Lemma 22 Given a µ-strongly convex function f : R
p
→ R and a positive parameter κ > 0.
For any x, y ∈ R
p
, the following inequality holds,
κ
κ + µ
hy − x, p(y) − p(x)i ≥ kp(y) − p(x)k
2
,
where p(x) = arg min
z∈R
p
n
f(z) +
κ
2
kz − xk
2
o
.
47
Lin, Mairal and Harchaoui
Proof By the definition of p(x), we have 0 ∈ ∂f(p(x)) + κ(p(x) − x), meaning that
κ(x − p(x)) ∈ ∂f(p(x)). By strong convexity of f ,
hκ(y − p(y)) − κ(x −p(x)), p(y) −p(x)i ≥ µkp(y) − p(x)k
2
.
Rearranging the terms yields the desired inequality.
As a consequence,
κ
κ + µ
(y
k
− y
k−1
) − (p(y
k
) − p(y
k−1
))
2
=
κ
κ + µ
(y
k
− y
k−1
)
2
− 2
κ
κ + µ
hy
k
− y
k−1
, p(y
k
) − p(y
k−1
)i + kp(y
k
) − p(y
k−1
)k
2
≤
κ
κ + µ
(y
k
− y
k−1
)
2
≤ ky
k
− y
k−1
k
2
.
Appendix C. Catalyst for MISO/Finito/SDCA
In this section, we present the application of Catalyst to MISO/Finito (Mairal, 2015; Defazio
et al., 2014b), which may be seen as a variant of SDCA (Shalev-Shwartz and Zhang, 2016).
The reason why these algorithms require a specific treatment is due to the fact that their
linear convergence rates are given in a different form than (12); specifically, Theorem 4.1
of Lin et al. (2015a) tells us that MISO produces a sequence of iterates (z
t
)
t≥0
for minimizing
the auxiliary objective h(z) = f(z) +
κ
2
kz − yk
2
such that
E[h(z
t
)] − h
∗
≤ C
M
(1 − τ
M
)
t+1
(h
∗
− d
0
(z
0
)),
where d
0
is a lower-bound of h defined as the sum of a simple quadratic function and the
composite regularization ψ. More precisely, these algorithms produce a sequence (d
t
)
t≥0
of such lower-bounds, and the iterate z
t
is obtained by minimizing d
t
in closed form. In
particular, z
t
is obtained from taking a proximal step at a well chosen point w
t
, providing
the following expression,
z
t
= prox
ψ/(κ+µ)
(w
t
).
Then, linear convergence is achieved for the duality gap
E[h(z
t
) − h
∗
] ≤ E[h(z
t
) − d
t
(z
t
)] ≤ C
M
(1 − τ
M
)
t
(h
∗
− d
0
(z
0
)).
Indeed, the quantity h(z
t
)−d
t
(z
t
) is a natural upper-bound on h(z
t
)−h
∗
, which is simple to
compute, and which can be naturally used for checking the criterions (C1) and (C2). Con-
sequently, the expected complexity of solving a given problem is slightly different compared
to Lemma 11.
Lemma 23 (Accuracy vs. complexity) Let us consider a strongly convex objective h
and denote (z
t
)
t≥0
the sequence of iterates generated by MISO/Finito/SDCA. Consider the
48
Catalyst for First-order Convex Optimization
complexity T (ε) = inf{t ≥ 0, h(z
t
) − d
t
(z
t
) ≤ ε}, where ε > 0 is the target accuracy and h
∗
is the minimum value of h. Then,
E[T (ε)] ≤
1
τ
M
log
2C
M
(h
∗
− d
0
(z
0
))
τ
M
ε
+ 1,
where d
0
is a lower bound of f built by the algorithm.
For the convergence analysis, the outer-loop complexity does not change as long as the
algorithm finds approximate proximal points satisfying criterions (C1) and (C2). It is then
sufficient to control the inner loop complexity. As we can see, we now need to bound the
dual gap h
∗
−d
0
(z
0
) instead of the primal gap h(z
0
) −h
∗
, leading to slightly different warm
start strategies. Here, we show how to restart MISO/Finito.
Proposition 24 (Warm start for criterion (C1)) Consider applying Catalyst with the
same parameter choices as in Proposition 12 to MISO/Finito. At iteration k + 1 of Algo-
rithm 2, assume that we are given the previous iterate x
k
in p
ε
k
(y
k−1
), the corresponding
dual function d(x) and its prox-center w
k
satisfying x
k
= prox
ψ/(κ+µ)
(w
k
). Then, initialize
the sequence (z
t
)
t≥0
for minimizing h
k+1
= f +
κ
2
k · −y
k
k
2
with,
z
0
= prox
ψ/(κ+µ)
w
k
+
κ
κ + µ
(y
k
− y
k−1
)
,
and initialize the dual function as
d
0
(x) = d(x) +
κ
2
kx − y
k
k
2
−
κ
2
kx − y
k−1
k
2
.
Then,
1. when f is µ-strongly convex, we have h
∗
k+1
− d
0
(z
0
) ≤ Cε
k+1
with the same constant
as in (21) and (22), where d
0
is the dual function corresponding to z
0
;
2. when f is convex with bounded level sets, there exists a constant B > 0 identical to
the one of (23) such that
h
∗
k+1
− d
0
(z
0
) ≤ B.
Proof The proof is given in Lemma D.5 of Lin et al. (2015a), which gives
h
∗
k+1
− d
0
(z
0
) ≤ ε
k
+
κ
2
2(κ + µ)
ky
k
− y
k−1
k
2
.
This term is smaller than the quantity derived from (24), leading to the same upper bound.
Proposition 25 (Warm start for criterion (C2)) Consider applying Catalyst with the
same parameter choices as in Proposition 15 to MISO/Finito. At iteration k + 1 of Al-
gorithm 2, we assume that we are given the previous iterate x
k
in g
δ
k
(y
k−1
) and the
49
Lin, Mairal and Harchaoui
corresponding dual function d(x). Then, initialize the sequence (z
t
)
t≥0
for minimizing
h
k+1
= f +
κ
2
k · −y
k
k
2
by
z
0
= prox
ψ/(κ+µ)
y
k
−
1
κ + µ
∇f
0
(y
k
)
,
where f = f
0
+ ψ and f
0
is the smooth part of f, and set the dual function d
0
by
d
0
(x) = f
0
(y
k
) + h∇f
0
(y
k
), x − y
k
i +
κ + µ
2
kx − y
k
k
2
+ ψ(x).
Then,
h
∗
k+1
− d
0
(z
0
) ≤
(L + κ)
2
2(µ + κ)
kp(y
k
) − y
k
k
2
. (31)
Proof Since p(y
k
) is the minimum of h
k+1
, the optimality condition provides
−∇f
0
(p(y
k
)) − κ(p(y
k
) − y
k
) ∈ ∂ψ(p(y
k
)).
Thus, by convexity,
ψ(p(y
k
)) + h−∇f
0
(p(y
k
)) − κ(p(y
k
) − y
k
), z
0
− p(y
k
)i ≤ ψ(z
0
),
f
0
(p(y
k
)) +
κ
2
kp(y
k
) − y
k
k
2
+ h∇f
0
(p(y
k
)) + κ(p(y
k
) − y
k
), y
k
− p(y
k
)i ≤ f
0
(y
k
).
Summing up gives
h
∗
k+1
≤ f
0
(y
k
) + ψ(z
0
) + h∇f
0
(p(y
k
)) + κ(p(y
k
) − y
k
), z
0
− y
k
i.
As a result,
h
∗
k+1
− d
0
(z
0
) ≤ f
0
(y
k
) + ψ(z
0
) + h∇f
0
(p(y
k
)) + κ(p(y
k
) − y
k
), z
0
− y
k
i − d
0
(z
0
)
= h∇f
0
(p(y
k
)) + κ(p(y
k
) − y
k
) − ∇f
0
(y
k
), z
0
− y
k
i −
κ + µ
2
kz
0
− y
k
k
2
≤
1
2(κ + µ)
k∇f
0
(p(y
k
)) − ∇f
0
(y
k
)
| {z }
k·k≤Lkp(y
k
)−y
k
k
+κ(p(y
k
) − y
k
)k
2
≤
(L + κ)
2
2(µ + κ)
kp(y
k
) − y
k
k
2
.
The bound obtained from (31) is similar to the one form Proposition 15, and differs
only in the constant factor. Thus, the inner loop complexity in Section 4.2.2 still holds
for MISO/Finito up to a constant factor. As a consequence, the global complexity of
MISO/Finito applied to Catalyst is similar to one obtained by SVRG, yielding an acceler-
ation for ill-conditioned problems.
50
Catalyst for First-order Convex Optimization
References
A. Agarwal and L. Bottou. A lower bound for the optimization of finite sums. In Proceedings
of the International Conferences on Machine Learning (ICML), 2015.
Z. Allen-Zhu. Katyusha: The first direct acceleration of stochastic gradient methods. In
Proceedings of Symposium on Theory of Computing (STOC), 2017.
Y. Arjevani and O. Shamir. Dimension-free iteration complexity of finite sum optimization
problems. In Advances in Neural Information Processing Systems (NIPS), 2016.
A. Auslender. Numerical methods for nondifferentiable convex optimization. In Nonlinear
Analysis and Optimization, volume 30, pages 102–126. Springer, 1987.
F. Bach, R. Jenatton, J. Mairal, and G. Obozinski. Optimization with sparsity-inducing
penalties. Foundations and Trends in Machine Learning, 4(1):1–106, 2012.
A. Beck and M. Teboulle. A fast iterative shrinkage-thresholding algorithm for linear inverse
problems. SIAM Journal on Imaging Sciences, 2(1):183–202, 2009.
D. P. Bertsekas. Convex Optimization Algorithms. Athena Scientific, 2015.
A. Chambolle and T. Pock. A remark on accelerated block coordinate descent for computing
the proximity operators of a sum of convex functions. SMAI Journal of Computational
Mathematics, 1:29–54, 2015.
R. Correa and C. Lemar´echal. Convergence of some algorithms for convex minimization.
Mathematical Programming, 62(1):261–275, 1993.
A. Defazio. A simple practical accelerated method for finite sums. In Advances in Neural
Information Processing Systems (NIPS), 2016.
A. Defazio, F. Bach, and S. Lacoste-Julien. SAGA: A fast incremental gradient method with
support for non-strongly convex composite objectives. In Advances in Neural Information
Processing Systems (NIPS), 2014a.
A. Defazio, J. Domke, and T. S. Caetano. Finito: A faster, permutable incremental gra-
dient method for big data problems. In Proceedings of the International Conferences on
Machine Learning (ICML), 2014b.
O. Devolder, F. Glineur, and Y. Nesterov. First-order methods of smooth convex optimiza-
tion with inexact oracle. Mathematical Programming, 146(1-2):37–75, 2014.
R. Frostig, R. Ge, S. M. Kakade, and A. Sidford. Un-regularizing: approximate proximal
point and faster stochastic algorithms for empirical risk minimization. In Proceedings of
the International Conferences on Machine Learning (ICML), 2015.
M. Fuentes, J. Malick, and C. Lemar´echal. Descentwise inexact proximal algorithms
for smooth optimization. Computational Optimization and Applications, 53(3):755–769,
2012.
51
Lin, Mairal and Harchaoui
P. Giselsson and M. F¨alt. Nonsmooth minimization using smooth envelope functions.
arXiv:1606.01327, 2016.
O. G¨uler. On the convergence of the proximal point algorithm for convex minimization.
SIAM Journal on Control and Optimization, 29(2):403–419, 1991.
O. G¨uler. New proximal point algorithms for convex minimization. SIAM Journal on
Optimization, 2(4):649–664, 1992.
B. He and X. Yuan. An accelerated inexact proximal point algorithm for convex minimiza-
tion. Journal of Optimization Theory and Applications, 154(2):536–548, 2012.
R. Johnson and T. Zhang. Accelerating stochastic gradient descent using predictive variance
reduction. In Advances in Neural Information Processing Systems (NIPS), 2013.
G. Lan and Y. Zhou. An optimal randomized incremental gradient method. Mathematical
Programming, 2017.
C. Lemar´echal and C. Sagastiz´abal. Practical aspects of the Moreau–Yosida regularization:
Theoretical preliminaries. SIAM Journal on Optimization, 7(2):367–385, 1997.
H. Lin, J. Mairal, and Z. Harchaoui. A universal catalyst for first-order optimization. In
Advances in Neural Information Processing Systems (NIPS), 2015a.
Q. Lin, Z. Lu, and L. Xiao. An accelerated randomized proximal coordinate gradient
method and its application to regularized empirical risk minimization. SIAM Journal on
Optimization, 25(4):2244–2273, 2015b.
J. Mairal. Incremental majorization-minimization optimization with application to large-
scale machine learning. SIAM Journal on Optimization, 25(2):829–855, 2015.
J. Mairal. End-to-end kernel learning with supervised convolutional kernel networks. In
Advances in Neural Information Processing Systems (NIPS), 2016.
B. Martinet. Br`eve communication. R´egularisation d’in´equations variationnelles par ap-
proximations successives. Revue fran¸caise d’informatique et de recherche op´erationnelle,
s´erie rouge, 4(3):154–158, 1970.
J.-J. Moreau. Fonctions convexes duales et points proximaux dans un espace hilbertien.
CR Acad. Sci. Paris S´er. A Math, 255:2897–2899, 1962.
A. Nemirovskii and D. B. Yudin. Problem complexity and method efficiency in optimization.
John Wiley & Sons, 1983.
Y. Nesterov. A method of solving a convex programming problem with convergence rate
O(1/k
2
). Soviet Mathematics Doklady, 27(2):372–376, 1983.
Y. Nesterov. Introductory Lectures on Convex Optimization: A Basic Course. Springer,
2004.
52
Catalyst for First-order Convex Optimization
Y. Nesterov. Efficiency of coordinate descent methods on huge-scale optimization problems.
SIAM Journal on Optimization, 22(2):341–362, 2012.
Y. Nesterov. Gradient methods for minimizing composite functions. Mathematical Pro-
gramming, 140(1):125–161, 2013.
C. Paquette, H. Lin, D. Drusvyatskiy, J. Mairal, and Z. Harchaoui. Catalyst acceleration for
gradient-based non-convex optimization. In Proceedings of the International Conference
on Artificial Intelligence and Statistics (AISTATS), 2018.
N. Parikh and S. P. Boyd. Proximal algorithms. Foundations and Trends in Optimization,
1(3):123–231, 2014.
P. Richt´arik and M. Tak´aˇc. Iteration complexity of randomized block-coordinate descent
methods for minimizing a composite function. Mathematical Programming, 144(1-2):1–38,
2014.
R. T. Rockafellar. Monotone operators and the proximal point algorithm. SIAM Journal
on Control and Optimization, 14(5):877–898, 1976.
S. Salzo and S. Villa. Inexact and accelerated proximal point algorithms. Journal of Convex
Analysis, 19(4):1167–1192, 2012.
M. Schmidt, N. Le Roux, and F. Bach. Convergence rates of inexact proximal-gradient
methods for convex optimization. In Advances in Neural Information Processing Systems
(NIPS), 2011.
M. Schmidt, N. Le Roux, and F. Bach. Minimizing finite sums with the stochastic average
gradient. Mathematical Programming, 160(1):83–112, 2017.
D. Scieur, A. d’ Aspremont, and F. Bach. Regularized nonlinear acceleration. In Advances
in Neural Information Processing Systems (NIPS), 2016.
S. Shalev-Shwartz and T. Zhang. Proximal stochastic dual coordinate ascent. preprint
arXiv:1211.2717, 2012.
S. Shalev-Shwartz and T. Zhang. Accelerated proximal stochastic dual coordinate ascent
for regularized loss minimization. Mathematical Programming, 155(1):105–145, 2016.
A. Sidi. Vector Extrapolation Methods with Applications. Society for Industrial and Applied
Mathematics, 2017.
M. V. Solodov and B. F. Svaiter. A unified framework for some inexact proximal point
algorithms. Numerical Functional Analysis and Optimization, 22(7-8):1013–1035, 2001.
A. Themelis, L. Stella, and P. Patrinos. Forward-backward envelope for the sum of
two nonconvex functions: Further properties and nonmonotone line-search algorithms.
arXiv:1606.06256, 2016.
B. E. Woodworth and N. Srebro. Tight complexity bounds for optimizing composite objec-
tives. In Advances in Neural Information Processing Systems (NIPS), 2016.
53
Lin, Mairal and Harchaoui
L. Xiao and T. Zhang. A proximal stochastic gradient method with progressive variance
reduction. SIAM Journal on Optimization, 24(4):2057–2075, 2014.
K. Yosida. Functional analysis. Berlin-Heidelberg, 1980.
Y. Zhang and L. Xiao. Stochastic primal-dual coordinate method for regularized empirical
risk minimization. In Proceedings of the International Conferences on Machine Learning
(ICML), 2015.
H. Zou and T. Hastie. Regularization and variable selection via the elastic net. Journal of
the Royal Statistical Society: Series B (Statistical Methodology), 67(2):301–320, 2005.
54
