
DolphinAack: Inaudible Voice Commands
Guoming Zhang
∗
Zhejiang University
Chen Yan
∗
Zhejiang University
Xiaoyu Ji
†
Zhejiang University
Tianchen Zhang
Zhejiang University
tianchen-[email protected]
Taimin Zhang
Zhejiang University
ztm1992[email protected]
Wenyuan Xu
†
Zhejiang University
ABSTRACT
Speech recognition (SR) systems such as Siri or Google Now have be-
come an increasingly popular human-computer interaction method,
and have turned various systems into voice controllable systems
(VCS). Prior work on attacking VCS shows that the hidden voice
commands that are incomprehensible to people can control the
systems. Hidden voice commands, though ‘hidden’, are nonethe-
less audible. In this work, we design a completely inaudible attack,
DolphinAttack
, that modulates voice commands on ultrasonic
carriers (e.g.,
f >
20 kHz) to achieve inaudibility. By leveraging
the nonlinearity of the microphone circuits, the modulated low-
frequency audio commands can be successfully demodulated, recov-
ered, and more importantly interpreted by the speech recognition
systems. We validate
DolphinAttack
on popular speech recogni-
tion systems, including Siri, Google Now, Samsung S Voice, Huawei
HiVoice, Cortana and Alexa. By injecting a sequence of inaudible
voice commands, we show a few proof-of-concept attacks, which
include activating Siri to initiate a FaceTime call on iPhone, activat-
ing Google Now to switch the phone to the airplane mode, and even
manipulating the navigation system in an Audi automobile. We pro-
pose hardware and software defense solutions. We validate that it
is feasible to detect
DolphinAttack
by classifying the audios using
supported vector machine (SVM), and suggest to re-design voice
controllable systems to be resilient to inaudible voice command
attacks.
KEYWORDS
Voice Controllable Systems, Speech Recognition, MEMS Micro-
phones, Security Analysis, Defense
1 INTRODUCTION
Speech recognition (SR) technologies allow machines or programs
to identify spoken words and convert them into machine-readable
∗
Guoming and Chen are co-rst authors.
†
Corresponding faculty authors.
Permission to make digital or hard copies of all or part of this work for personal or
classroom use is granted without fee provided that copies are not made or distributed
for prot or commercial advantage and that copies bear this notice and the full citation
on the rst page. Copyrights for components of this work owned by others than ACM
must be honored. Abstracting with credit is permitted. To copy otherwise, or republish,
to post on servers or to redistribute to lists, requires prior specic permission and/or a
CCS ’17, October 30-November 3, 2017, Dallas, TX, USA
© 2017 Association for Computing Machinery.
ACM ISBN 978-1-4503-4946-8/17/10. ..$15.00
https://doi.org/10.1145/3133956.3134052
formats. It has become an increasingly popular human-computer
interaction mechanism because of its accessibility, eciency, and
recent advances in recognition accuracy. As a result, speech recog-
nition systems have turned a wide variety of systems into voice
controllable systems (VCS): Apple Siri [
5
] and Google Now [
21
]
allow users to initiate phone calls by voices; Alexa [
4
] has enabled
users to instruct an Amazon Echo to order takeouts, schedule a Uber
ride, etc. As researchers devote much of their eort into improving
the performance of SR systems, what is less well understood is
how speech recognition and the voice controllable systems behave
under intentional and sneaky attacks.
Prior work [
10
,
61
] has shown that obfuscated voice commands
which are incomprehensible to human can be understood by SR
systems, and thus may control the systems without being detected.
Such voice commands, though ‘hidden’, are nonetheless audible and
remain conspicuous. This paper aims at examining the feasibility
of the attacks that are dicult to detect, and the paper is driven by
the following key questions: Can voice commands be
inaudible
to
human while still being audible to devices and intelligible to speech
recognition systems? Can injecting a sequence of inaudible voice com-
mands lead to unnoticed security breaches to the voice controllable
systems? To answer these questions, we designed
DolphinAttack
,
an approach to inject inaudible voice commands at VCS by exploit-
ing the ultrasound channel (i.e.,
f >
20 kHz) and the vulnerability
of the underlying audio hardware.
Inaudible voice commands may appear to be unfeasible with
the following doubts. (a) How can inaudible sounds be audible to
devices? The upper bound frequency of human voices and human
hearing is 20 kHz. Thus, most audio-capable devices (e.g., phones)
adopt audio sampling rates lower than 44 kHz, and apply low-pass
lters to eliminate signals above 20 kHz [
32
]. Previous work [
61
]
considers it impossible to receive voices above 20 kHz. (b) How
can inaudible sounds be intelligible to SR systems? Even if the ultra-
sound is received and correctly sampled by hardware, SR systems
will not recognize signals that do not match human tonal features,
and therefore unable to interpret commands. (c) How can inaudible
sounds cause unnoticed security breach to VCS? The rst step towards
controlling VCSs is to activate them. Many VCSs (e.g., smartphones
and smart home devices) implement the always-on feature that
allows them to be activated by speaker-dependent wake words, i.e.,
such systems utilize voice recognition to authenticate a user. A ran-
dom voice command will not pass the voice recognition. We solved
all these problems, and we show that the
DolphinAttack
voice
commands, though totally inaudible and therefore imperceptible
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
103

to human, can be received by the audio hardware of devices, and
correctly understood by speech recognition systems. We validated
DolphinAttack
on major speech recognition systems, including
Siri, Google Now, Samsung S Voice [
43
], Huawei HiVoice [
65
], Cor-
tana [37], and Alexa.
Inaudible voice commands question the common design assump-
tion that adversaries may at most try to manipulate a VCS vocally
and can be detected by an alert user. Furthermore, we characterize
the security consequences of such an assumption by asking the
following: to what extent a sequence of inaudible voice commands
can compromise the security of VCSs. To illustrate, we show that
DolphinAttack
can achieve the following sneaky attacks purely
by a sequence of inaudible voice commands:
(1)
Visiting a malicious website. The device can open a malicious
website, which can launch a drive-by-download attack or
exploit a device with 0-day vulnerabilities.
(2)
Spying. An adversary can make the victim device initiate
outgoing video/phone calls, therefore getting access to the
image/sound of device surroundings.
(3)
Injecting fake information. An adversary may instruct the vic-
tim device to send fake text messages and emails, to publish
fake online posts, to add fake events to a calendar, etc.
(4)
Denial of service. An adversary may inject commands to turn
on the airplane mode, disconnecting all wireless communi-
cations.
(5)
Concealing attacks. The screen display and voice feedback
may expose the attacks. The adversary may decrease the
odds by dimming the screen and lowering the volume.
We have tested these attacks on 16 VCS models including Apple
iPhone, Google Nexus, Amazon Echo, and automobiles. Each attack
is successful on at least one SR system. We believe this list is by
far not comprehensive. Nevertheless, it serves as a wake-up call to
reconsider what functionality and levels of human interaction shall
be supported in voice controllable systems.
In summary, our contributions are listed as follows.
•
We present
DolphinAttack
that can inject covert voice com-
mands at state-of-the-art speech recognition systems by ex-
ploiting inaudible sounds and the property of audio circuits.
We validate
DolphinAttack
on 7 popular speech recognition
systems (e.g., Siri, Google Now, Alexa) across 16 common
voice controllable system platforms.
•
We show that adversaries can inject a sequence of inaudible
voice commands to activate always-on system and achieve
various malicious attacks. Tested attacks include launching
Facetime on iPhones, playing music on an Amazon Echo and
manipulating the navigation system in an Audi automobile.
•
We suggest both hardware-based and software-based defense
strategies to alleviate the attacks, and we provide suggestions
to enhance the security of voice controllable systems.
2 BACKGROUND AND THREAT MODEL
In this section, we introduce popular voice controllable systems,
and discuss their architecture with a focus on MEMS microphones.
!
"
#
$
Figure 1: The architecture of a state-of-the-art VCS that can
take voice commands as inputs and execute commands.
2.1 Voice Controllable System
A typical voice controllable system consists of three main sub-
systems: voice capture, speech recognition, and command execution,
as illustrated in Fig. 1. The voice capture subsystem records am-
bient voices, which are amplied, ltered, and digitized, before
being passed into the speech recognition subsystem. Then, the raw
captured digital signals are rst pre-processed to remove frequen-
cies that are beyond the audible sound range and to discard signal
segments that contain sounds too weak to be identied. Next, the
processed signals enter the speech recognition system.
Typically, a speech recognition system works in two phases:
activation and recognition. During the activation phase, the system
cannot accept arbitrary voice inputs, but it waits to be activated. To
activate the system, a user has to either say pre-dened wake words
or press a special key. For instance, Amazon echo takes “Alexa” as
the activation wake word. Apple Siri can be activated by pressing
and holding the home button for about one second or by “Hey
Siri” if the “Allow Hey Siri” feature is enabled
1
. To recognize the
wake words, the microphones continue recording ambient sounds
until a voice is collected. Then, the systems will use either speaker-
dependent or speaker-independent speech recognition algorithm
to recognize the voice. For instance, the Amazon Echo exploits
speaker-independent algorithms and accepts ‘Alexa’ spoken by any
one as long as the voice is clear and loud. In comparison, Apple Siri
is speaker dependent. Siri requires to be trained by a user and only
accepts “Hey Siri” from the same person. Once activated, the SR
system enters the recognition phase and will typically use speaker-
independent algorithms to convert voices into texts, i.e., commands
in our cases.
Note that a speaker-dependent SR is typically performed locally
and a speaker-independent SR is performed via a cloud service [
28
].
To use the cloud service, the processed signals are sent to the servers,
which will extract features (typically Mel-frequency cepstral coe-
cients [
10
,
27
,
62
]) and recognize commands via machine learning
algorithms (e.g., the Hidden Markov Models or neural networks).
Finally, the commands are sent back.
Given a recognized command, the command execution system
will launch the corresponding application or execute an operation.
The acceptable commands and corresponding actions are system
dependent and dened beforehand. Popular voice controllable sys-
tems include smartphones, wearable devices, smart home devices,
1
For older generation of iPhones such as iPhone 4s and iPhone 6, the “Allow Hey Siri”
mode is only available when the device is charging.
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
104

Figure 2: An illustration of the electret condenser micro-
phone (ECM) and MEMS microphone structure.
and automobiles. Smartphones allow users to perform a wide range
of operation via voice commands, such as dialing a phone number,
sending short messages, opening a webpage, setting the phone to
the airplane mode, etc. Modern automobiles accept an elaborate set
of voice commands to activate and control a few in-car features,
such as GPS, the entertainment system, the environmental controls,
and mobile phones. For instance, if “call 1234567890” is recognized,
an automobile or a smartphone may start dialing the phone number
1234567890.
Many security studies on voice controllable systems focus on
attacking either the speech recognition algorithms [
10
] or command
execution environment (e.g., malware). This paper aims at the voice
capturing subsystem, which will be detailed in the next subsection.
2.2 Microphone
A voice capture subsystem records audible sounds and is mainly a
microphone, which is a transducer that converts airborne acoustic
waves (i.e., sounds) to electrical signals. One of the oldest and most
popular types of microphones is called condenser microphones,
which convert the sound waves into electrical signals via capacity
changes. Both Electret Condenser Microphones (ECMs) and Micro
Electro Mechanical Systems (MEMS) [
2
,
3
,
29
,
52
,
53
] versions are
available on the market. Due to the miniature package sizes and low
power consumption, MEMS microphones dominate voice control-
lable devices, including smartphones, wearable devices. Thus, this
paper focuses mainly on MEMS microphones and will report results
on ECMs briey. Nevertheless, MEMS and ECMs work similarly.
As shown in Fig. 2(b), a MEMS microphone contains membrane (a
movable plate) and a complementary perforated back-plate (a xed
plate) [
54
]. In the presence of a sound wave, the air pressure caused
by the sound wave passes through the holes on the back-plate and
reaches the membrane, which is a thin solid structure that exes
in response to the change in air pressure [
64
]. This mechanical
deformation leads to a capacitive change. Since a nearly constant
charge is maintained on the capacitor, the capacitance changes will
produce an AC signal. In this way, air pressure is converted into
an electrical signal for further processing. Similarly, as shown in
Fig. 2(a), an ECM microphone utilizes the capacity formed by a
exible membrane and a xed plate to record sound waves.
Designed to capture audible sounds, microphones, low-pass l-
ters (LPFs), and ADC in the voice capture subsystem are all designed
to suppress signals out of the frequency range of audible sounds (i.e.,
20 Hz to 20 kHz). According to datasheets, the sensitivity spectrum
of microphones is between 20 Hz to 20 kHz, and ideally signals in
any other frequency range shall be ltered. Even if a signal higher
OK,GoogleSiri
S Voice
Cortana
Alexa
Hi, Voice
Amplifier LPF
ADC
AD ConverterMicrophone
Figure 3: An illustration on the modulated tone traversing
the signal pathway of a voice capture device in terms of FFT.
than 20 kHz is recorded by the microphone, it is supposed to be
removed by the LPF. Finally, the sampling rate of the ADC is typi-
cally 44.1 kHz, and the digitized signal’s frequency is limited below
22 kHz according to the Nyquist sampling theorem.
2.3 Threat Model
The adversary’s goal is to inject voice commands into the voice
controllable systems without owners’ awareness, and execute unau-
thenticated actions. We assume that adversaries have no direct ac-
cess to the targeted device, own equipment that transmits acoustic
signals, and cannot ask the owner to perform any tasks.
No Target Device Access.
We assume that an adversary may
target at any voice controllable systems of her choices, but she has
no direct access to the target devices. She cannot physically touch
them, alter the device settings, or install malware. However, we
assume that she is fully aware of the characteristics of the target
devices. Such knowledge can be gained by rst acquiring the device
model and then by analyzing the device of the same model before
launching attacks.
No Owner Interaction.
We assume that the target devices may
be in the owner’s vicinity, but may not be in use and draw no
attention (e.g., on the other side of a desk, with screen covered,
or in a pocket). In addition, the device may be unattended, which
can happen when the owner is temporarily away (e.g., leaving an
Amazon Echo in a room). Alternatively, a device may be stolen, and
an adversary may try every possible method to unlock the screen.
Nevertheless, the adversaries cannot ask owners to perform any
operation, such as pressing a button or unlocking the screen.
Inaudible.
Since the goal of an adversary is to inject voice com-
mands without being detected, she will use the sounds inaudible
to human, i.e., ultrasounds (
f >
20 kHz). Note that we did not use
high-frequency sounds (18 kHz
< f <
20 kHz) because they are
still audible to kids.
Attacking Equipment.
We assume that adversaries can acquire
both the speakers designed for transmitting ultrasound and com-
modity devices for playing audible sounds. An attacking speaker is
in the vicinity of the target devices. For instance, she may secretly
leave a remote controllable speaker around the victim’s desk or
home. Alternatively, she may be carrying a portable speaker while
walking by the victim.
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
105
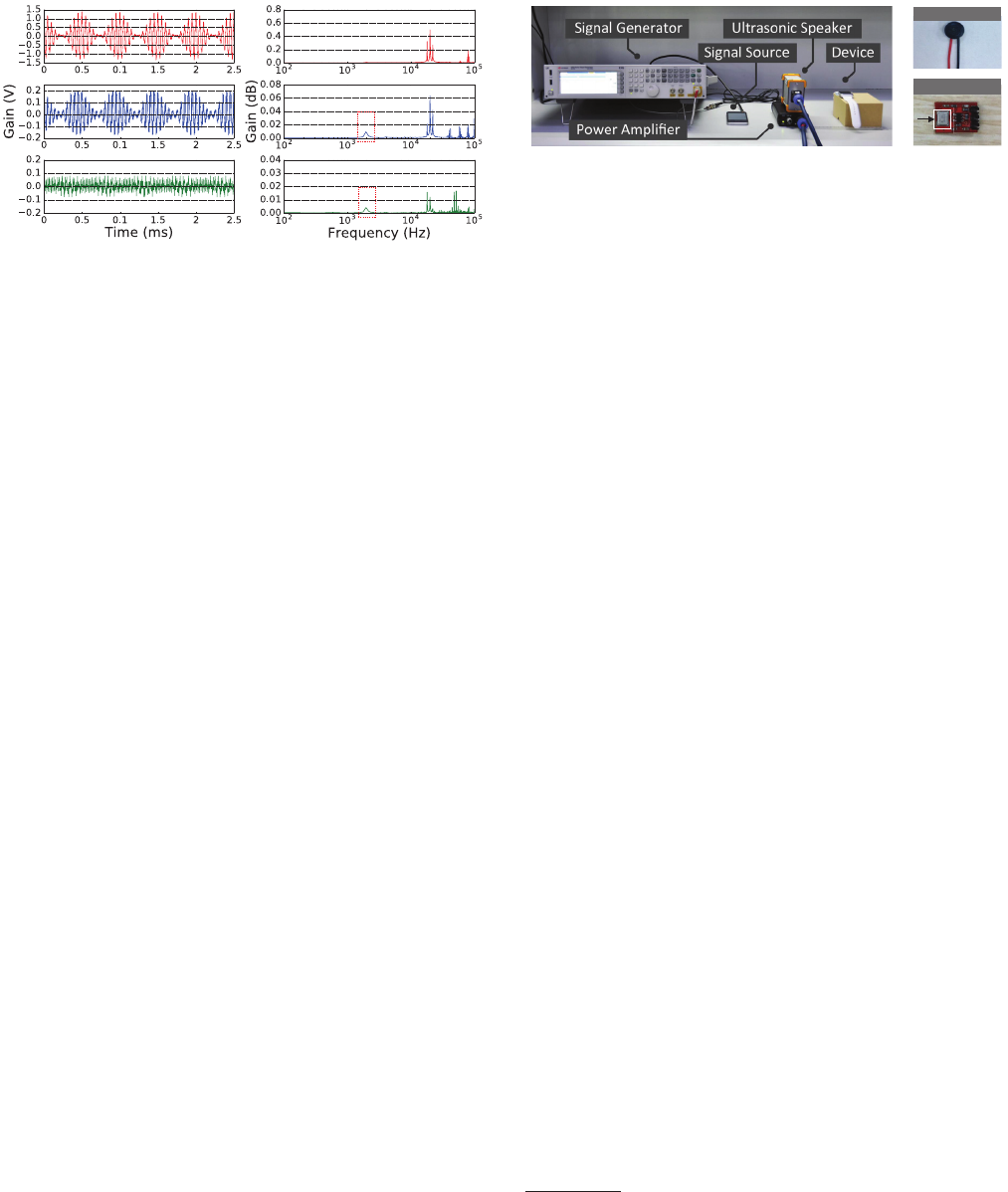
Figure 4: Evaluation of the nonlinearity eect. The time and
frequency domain plots for the original signal, the output
signal of the MEMS microphone, and the output signal of
the ECM microphone. The presence of baseband signals at
2 kHz shows that nonlinearity can demodulate the signals.
3 FEASIBILITY ANALYSIS
The fundamental idea of
DolphinAttack
is (a) to modulate the
low-frequency voice signal (i.e., baseband) on an ultrasonic car-
rier before transmitting it over the air, and (b) to demodulate the
modulated voice signals with the voice capture hardware at the
receiver. Since we have no control on the voice capture hardware,
we have to craft the modulated signals in such a way that it can be
demodulated to the baseband signal using the voice capture hard-
ware as it is. Given that microphone modules always utilize LPF to
suppress undesired high-frequency signals, the demodulation shall
be accomplished prior to LPF.
Since the signal pathway of voice capture hardware starts from a
microphone, one or more ampliers, LPF, to ADC, the potential com-
ponents for demodulation are microphones and ampliers. We look
into the principle of both to accomplish
DolphinAttack
. Although
electric components such as ampliers are designed to be linear,
in reality they exhibit
nonlinearity
. With this nonlinearity prop-
erty, the electric component is able to create new frequencies [
25
].
Although the nonlinearity for amplier modules is reported and
utilized, it remains unknown whether a microphone, including both
the ECM microphone and the MEMS one possesses such a property.
To investigate, we rst theoretically model the nonlinearity for
a microphone module, and then show the nonlinearity eect on
real microphone modules.
3.1 Nonlinearity Eect Modeling
A microphone converts mechanical sound waves into electrical
signals. Essentially, a microphone can be roughly considered as
a component with square-law non-linearity in the input/output
signal transfer characteristics [
1
,
13
]. Ampliers are known to have
nonlinearity, which can produce demodulated signals in the low-
frequency range [
20
]. In this paper, we study the nonlinearity of
microphones and we can model it as the following. Let the input
signal be s
in
(t), the output signal s
ou t
(t) is:
s
ou t
(t) = As
in
(t) + Bs
2
in
(t) (1)
where
A
is the gain for the input signal and
B
is the gain for the
quadratic term
s
2
in
. A linear component takes a sinusoidal input
ECM MicrophoneECM Microphone
MEMS Microphone
Figure 5: An illustration of the benchtop experimental setup
for investigating the feasibility of receiving ultrasounds
with ECM and MEMS microphones. This benchtop setup is
used for validating the feasibility of attacking various VCSs
as well.
signals of frequency
f
and outputs a sinusoidal signal with the same
frequency
f
. In comparison, the nonlinearity of electric devices
can produce harmonics and cross-products
2
. Although they are
typically considered undesirable distortions [
31
], the devices with
nonlinearity are able to generate new frequencies and with a crafted
input signal they can downconvert the signal as well as recover the
baseband signal.
Suppose the wanted voice control signal is m(t), we choose the
modulated signal on a carrier with central frequency f
c
to be
s
in
(t) = m(t)cos(2πf
c
t)+ cos(2πf
c
t) (2)
That is, amplitude modulation is used. Without loss of generality, let
m(t)
be a simple tone, i.e.,
m(t) = cos(
2
πf
m
t)
. After applying Eq. (2)
to Eq. (1) and taking the Fourier transform, we can conrm that
the output signal contains the intended frequency component
f
m
together with the fundamental frequency components of
s
in
(i.e.,
f
c
− f
m
,
f
c
+ f
m
, and
f
c
), harmonics, and other cross products (i.e.,
f
m
,
2
(f
c
−f
m
),
2
(f
c
+ f
m
),
2
f
c
,
2
f
c
+ f
m
,
and 2
f
c
−f
m
). After a LPF, all
high-frequency components will be removed and the
f
m
frequency
component will remain, which completes the downconversion, as
shown in Fig. 3.
3.2 Nonlinearity Eect Evaluation
Given the theoretical calculation of the nonlinearity eect of the
microphone module and its inuence on the input signal after
modulation, in this section, we verify the nonlinearity eect on real
microphones. We test both types of microphones: ECM and MEMS
microphones.
3.2.1 Experimental Setup. The experimental setup is shown in
Fig. 5. We use an iPhone SE smartphone to generate a 2 kHz voice
control signal, i.e. the baseband signal. The baseband signal is then
inputted to a vector signal generator [
57
], which modulates the
baseband signal onto a carrier. After amplied by a power amplier,
the modulated signal is transmitted by a high-quality full-band
ultrasonic speaker Vifa [
9
]. Note that we choose the carriers ranging
from 9 kHz to 20 kHz, because the signal generator cannot generate
signals at the frequencies lower than 9 kHz.
On the receiver side, we test an ECM microphone that was ex-
tracted from a headphone and an ADMP401 MEMS microphone [
16
].
2
Harmonics are frequencies that are integer multiples of the fundamental frequency
components, and cross-products are multiplicative or conjunctive combinations of
harmonics and fundamental frequency components.
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
106
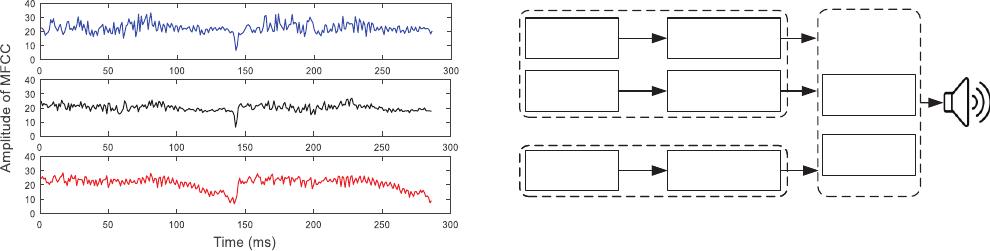
Figure 6: The MFCC for three sound clips of “Hey”. From top
to bottom: the TTS generated voice, the recorded voice as the
TTS voice is played in audible sounds, the recorded voice as
the TTS voice is modulated to 25 kHz.
As is shown in Fig. 5, the ADMP401 microphone module contains
a preamplier. To understand the characteristics of microphones,
we measure the signals outputted by the microphone instead of by
the preamplier.
3.2.2 Results. We studied the nonlinearity using two types of
signals: single tones and voices with multiple tones.
Single Tone.
Fig. 4 shows the result when we use a 20 kHz
carrier, which conrms that the nonlinearity of the microphone
manages to demodulate the baseband signals. The top two gures
show the original signal from the speaker in the time domain and
the frequency domain, whereby the carrier frequency (20 kHz) and
an upper side band as well as a lower sideband (20
±
2 kHz) appear
nicely. The two gures in the second row show the output signal
from the MEMS microphone and the bottom two gures depict the
output signal from the ECM microphone. Even though the signals
were attenuated, especially for ECM microphones, the baseband
(2 kHz) in the frequency domain for both microphones conrm
the success of demodulation. Note that the frequency domain plots
include several high-frequency harmonics, which will be ltered
by the LPF and shall not aect the speech recognition.
Voices.
Even though we can demodulate a signal tone success-
fully, voices are a mix of numerous tones at various frequencies and
it is unknown whether a demodulated voice signal remains similar
to the original one. Thus, we calculated Mel-frequency cepstral co-
ecients (MFCC), one of the most widely used features of sounds,
of three sound clips of “Hey”: (a) the original voice generated by
a text-to-speech (TTS) engine, (b) the voice recorded by a Sam-
sung Galaxy S6 Edge as an iPhone 6 plus played the original TTS
voice, and (c) the voice recorded by a Samsung S6 Edge as the TTS
voices are modulated and played by the full band ultrasonic speaker
Vifa [
9
]. As Fig. 6 shows, the MFCC of all three cases are similar. To
quantify the similarity, we calculate Mel-Cepstral Distortion (MCD)
between the original one and the recorded ones, which is 3.1 for
case (b) and 7.6 for case (c). MCD quanties the distortion between
two MFCCs, and the smaller the better. Typically, the two voices
are considered to be acceptable to voice recognition systems if their
Concatenative
Synthesis
Voice
Recording
TTS Module
Activation
Commands
TTS Module
Control
Commands
TTS Module
Control
Commands
Activation Command Generation
Control Command Generation
Powerful
Modulator
Portable
Modulator
Amplitude
Modulation
Figure 7: Architecture of the transmitter modules. The trans-
mitter mainly includes the command generation modules
and the modulation module.
MCD values are smaller than 8 [
23
], and thus the result encour-
ages us to carry out further study on
DolphinAttack
against voice
controllable systems.
4 ATTACK DESIGN
DolphinAttack
utilizes inaudible voice injection to control VCSs
silently. Since attackers have little control of the VCSs, the key of a
successful attack is to generate inaudible voice commands at the
attacking transmitter. In particular,
DolphinAttack
has to generate
the baseband signals of voice commands for both activation and
recognition phases of the VCSs, modulate the baseband signals such
that they can be demodulated at the VCSs eciently, and design
a portable transmitter that can launch
DolphinAttack
anywhere.
The basic building blocks of
DolphinAttack
are shown in Fig. 7,
and we discuss these details in the following subsections. Without
loss of generality, we discuss design details by using Siri as a case
study, and the technology can be applied to other SR systems (e.g.,
Google Now, HiVoice) easily.
4.1 Voice Command Generation
Siri works in two phases: activation and recognition. It requires acti-
vation before accepting voice commands, and thus we generate two
types of voice commands: activation commands and general con-
trol commands. To control a VCS,
DolphinAttack
has to generate
activation commands before injecting general control commands.
4.1.1 Activation Commands Generation. A successful activation
command has to satisfy two requirements: (a) containing the wake
words “Hey Siri”, and (b) toning to the specic voice of the user
that was trained for Siri.
Creating an activation command with both requirements is chal-
lenging, unless a user happens to speak “Hey Siri” when an attacker
is nearby and manages to create a clear recording. In practice, an
attacker can at most record arbitrary words by chances. Generating
“Hey Siri” of the specic voice using existing speech synthesis tech-
niques [
38
] and features extracted from the recordings is extremely
dierent, if ever possible, because it is unclear what set of features
are utilized by Siri for voice identication. As such, we design two
methods to generate activation commands for two scenarios, re-
spectively: (a) an attacker cannot nd the owner of Siri (e.g., an
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
107
MFCC
Matching
“Hey Siri”
Recorded
Sentences
HH S IH EY R IY
“he” “cake”“city” “carry”
“Hey”
“Siri”
+
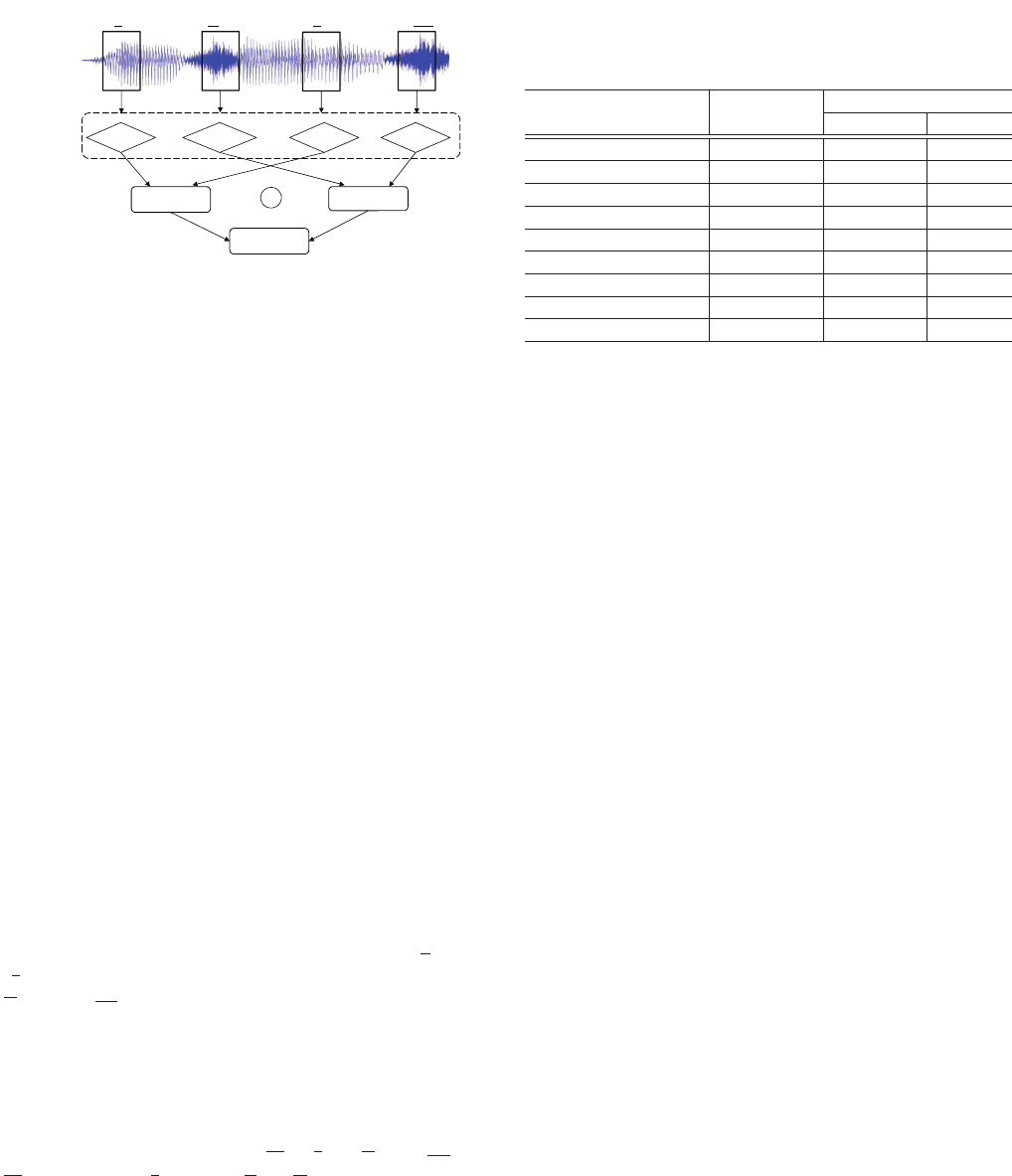
Figure 8: Concatenative synthesis of an activation command.
The MFCC feature for each segment in a recorded sentence
is calculated and compared with the phonemes in the activa-
tion command. After that, the matched voice segments are
shuled and concatenated in a right order.
attacker acquires a stolen smartphone), and (b) an attacker can
obtain a few recordings of the owner’s voice.
(1) TTS-based Brute Force.
The recent advancement in TTS
technique makes it easy to convert texts to voices. Thus, even if an
attacker has no chances to obtain any voice recordings from the
user, she can generate a set of activation commands that contain
wake words by TTS (Text to Speech) systems. This is inspired by
the observation that two users with similar vocal tones can activate
the other’s Siri. Thus, as long as one of the activation commands
in the set has a voice that is close enough to the owner, it suces
to activate Siri. In
DolphinAttack
, we prepare a set of activation
commands with various tone and timbre with the help of existing
TTS systems (summarized in Tab. 1), which include Selvy Speech,
Baidu, Google, etc. In total, we obtain 90 types of TTS voices. We
choose the Google TTS voice to train Siri and the rest for attacking.
(2) Concatenative Synthesis.
When an attacker can record a
few words from the owner of the Siri but not necessary “Hey Siri”,
we propose to synthesize a desired voice command by searching
for relevant phonemes from other words in available recordings.
There are roughly 44 phonemes in English, and the wake words
“Hey Siri” use 6 of them (i.e., HH, EY, S, IH, R, IY). Many words
pronounce the same as “Hey” or “Si” or “ri”, and it is possible to
splice them together. For example, we can concatenate “
h
e” and
“c
a
ke” to obtain “Hey”. Similarly, “Siri” can be a combination of
“
ci
ty” and “ca
rry
”. As illustrated in Fig. 8, We rst search for single
or combined phonemes in a recorded sentence and then extracts
the interested segments if a match is found. Finally, the matched
phonemes are assembled.
To evaluate the feasibility of this scheme, we conduct the fol-
lowing experiments. We use the Google TTS to generate “Hey Siri”
for training the SR system, and we generate two sets of candidate
voices to synthesize “Hey Siri”: 1. “
he
”, “c
a
ke”, “
ci
ty”, “ca
rry
”; 2.
“
he
is a boy”, “eat a c
a
ke”, “in the
ci
ty”, “
re
ad after me”. After syn-
thesizing the activation commands, we test them on an iPhone 4S
using the same experimental setup as shown in Fig. 5. Both of the
synthesized “Hey Siri” can activate Siri successfully.
Table 1: The list of TTS systems used for attacking the Siri
trained by the Google TTS system, and the evaluation results
on activation and control commands.
TTS Systems voice type #
# of successful types
Call 12..90 Hey Siri
Selvy Speech [51] 4 4 2
Baidu [8] 1 1 0
Sestek [45] 7 7 2
NeoSpeech [39] 8 8 2
Innoetics [59] 12 12 7
Vocalware [63] 15 15 8
CereProc [12] 22 22 9
Acapela [22] 13 13 1
Fromtexttospeech [58] 7 7 4
4.1.2 General Control Commands Generation. General control
commands can be any commands that launch applications (e.g.,
“call 911”, “open www.google.com”) or congure the devices (e.g.,
“turn on airplane mode”). Unlike the activation commands, an SR
system does not authenticate the identities of control commands.
Thus, an attacker can choose the text of any control command and
utilize TTS systems to generate the command.
4.1.3 Evaluation. We test both activation and control commands.
Without loss of generality, we generate both activation and control
commands by utilizing the TTS systems summarized in Tab. 1. In
particular, we download two voice commands from the websites
of these TTS systems: “Hey Siri” and “call 1234567890”. For activa-
tion, we use the “Hey Siri” from the Google TTS system to train
Siri, and the rest for testing. We play the voice commands by an
iPhone 6 Plus and the benchtop devices (shown in Fig. 5), and test
on an iPhone 4S. The activation and recognition results for both
commands are summarized in Tab. 1. The results show that the
control commands from any of the TTS systems can be recognized
by the SR system. 35 out of 89 types of activation commands can
activate Siri, resulting in a success rate of 39%.
4.2 Voice Commands Modulation
After generating the baseband signal of the voice commands, we
need to modulate them on ultrasonic carriers such that they are in-
audible. To leverage the nonlinearity of microphones,
DolphinAttack
has to utilize amplitude modulation (AM).
4.2.1 AM Modulation Parameters. In AM, the amplitude of the
carrier wave varies in proportion to the the baseband signal, and
amplitude modulation produces a signal with its power concen-
trated at the carrier frequency and two adjacent sidebands, as is
shown in Fig. 9. In the following, we describe how to select AM
parameters in DolphinAttack.
(1) Depth.
Modulation depth
m
is dened as
m = M/A
where A
is the carrier amplitude, and M is the modulation amplitude, i.e., M
is the peak change in the amplitude from its unmodulated value.
For example, if
m =
0
.
5, the carrier amplitude varies by 50% above
(and below) its unmodulated level. Modulation depth is directly
related to the utilization of the nonlinearity eect of microphones,
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
108
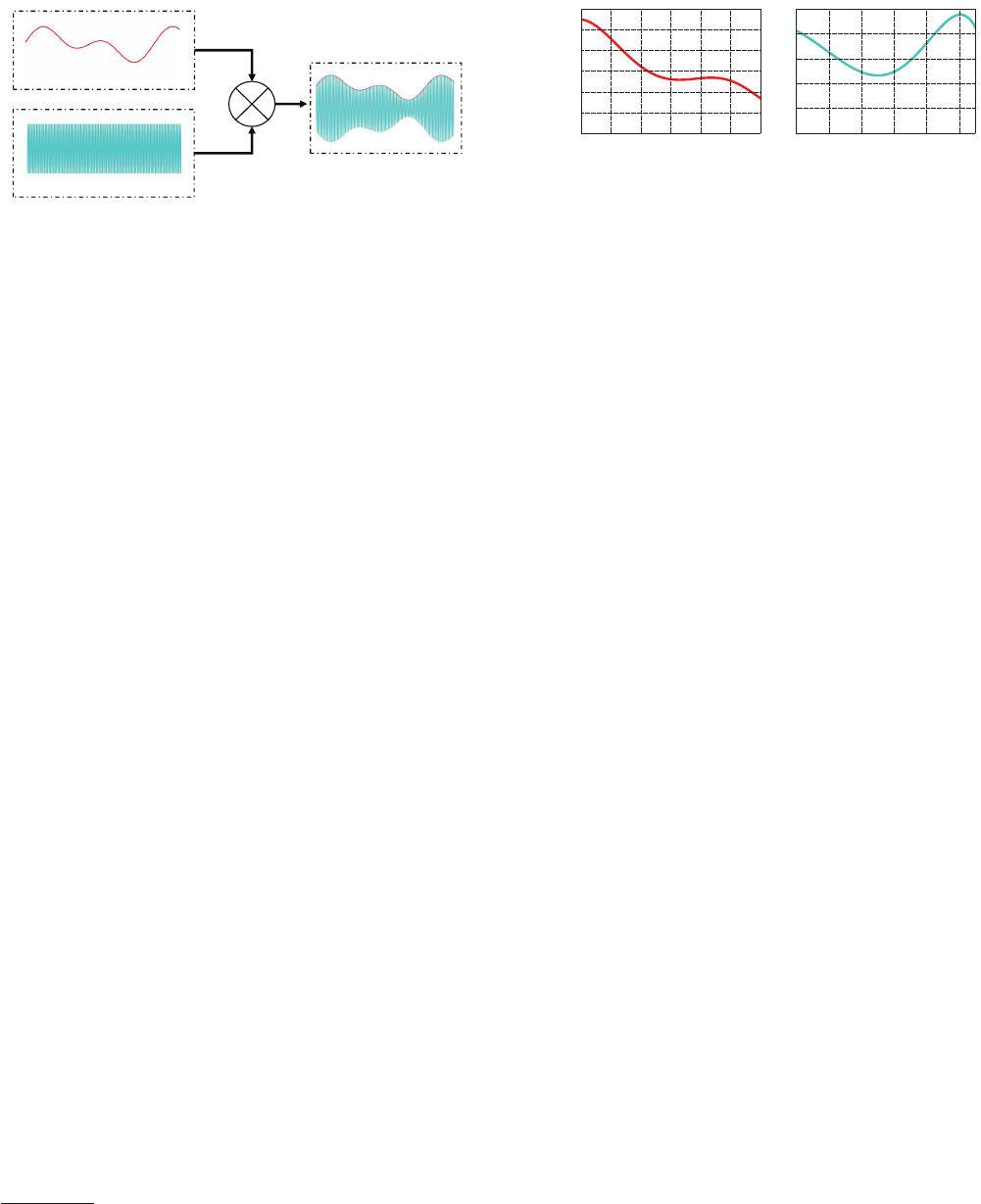
澶濕濧濙濖濕濢濘
澷濕濦濦濝濙濦
Figure 9: An illustration of modulating a voice command
onto an ultrasonic carrier using AM modulation.
and our experiments show that the modulation depth is hardware
dependent (detailed in Sec. 5).
(2) Carrier Frequency.
The selection of the carrier frequency depends on several factors:
the frequency range of ultrasounds, the bandwidth of the baseband
signal, the cut-o frequency of the low pass lter and the frequency
response of the microphone on the VCS, as well as the frequency
response of the attacking speaker. The lowest frequency of the
modulated signal should be larger than 20 kHz to ensure inaudibility.
Let the frequency range of a voice command be
w
, the carrier
frequency
f
c
has to satisfy the condition
f
c
− w >
20 kHz. For
instance, given that the bandwidth of the baseband is 6 kHz, the
carrier frequency has to be larger than 26 kHz to ensure that the
lowest frequency is larger than 20 kHz. One may consider to use
the carrier that is right below 20 kHz, because these frequencies
are inaudible to most people except for young kids. However, such
carriers (e.g., < 20 kHz) will not be eective. This is because when
the carrier frequency and lower sideband are below the cut-o
frequency of the low-pass lter, they will not be ltered. Therefore,
the recovered voices are dierent from the original signals, and the
speech recognition systems will fail to recognize the commands.
Similar to many electric devices, microphones are frequency se-
lective, e.g., the gains at various frequencies vary. For eciency, the
carrier frequency shall be the one that have the highest product of
the gains at both the speaker and the VCS microphone. To discover
the best carrier frequency, we measure the frequency response of
the speaker and microphones, i.e., given the same stimulus, we mea-
sure the output magnitude at various frequencies. Fig. 10 shows the
frequency response of the ADMP 401 MEMS microphone and the
speaker on a Samsung Galaxy S6 Edge
3
. The gains of the micro-
phones and speakers do not necessarily decrease with the increase
of frequencies, and thus eective carrier frequencies may not be
monotonous.
(3) Voice Selection.
Various voices map to various baseband
frequency ranges. For example, a female voice typically has a wider
frequency band than what a male voice has, which results in a larger
probability of frequency leakage over audible frequency range, i.e.,
the lowest frequency of the modulated signal may be smaller than
20 kHz. Thus, if possible, a voice with a small bandwidth shall be
selected to create baseband voice signals.
3
We used a professional ultrasonic microphone and speaker to assist measurement.
15 20 25 30 35 40 45
Frequency (kHz)
−12
−10
−8
−6
−4
−2
0
Gain (dB)
15 17 19 21 23 25
Frequency (kHz)
−5
−4
−3
−2
−1
0
Figure 10: The frequency responses of the ADMP401 MEMS
microphone (left) and the Samsung Galaxy S6 Edge speaker
(right).
4.3 Voice Commands Transmitter
We design two transmitters: (a) a powerful transmitter that is driven
by a dedicated signal generator (shown in Fig. 5) and (b) a portable
transmitter that is driven by a smartphone (shown in Fig. 11). We
utilize the rst one to validate and quantify the extent to which
DolphinAttack
can accomplish various inaudible voice commands,
and we use the second one to validate the feasibility of a walk-by
attack. Both transmitters consist of three components: a signal
source, a modulator, and a speaker. The signal source produces
baseband signals of the original voice commands, and outputs to
the modulator, which modulates the voice signal onto a carrier wave
of frequency
f
c
in forms of amplitude modulation (AM). Finally,
the speaker transforms the modulated signal into acoustic waves,
and note that the sampling rate of the speaker has to be larger than
2(f
c
+ w) to avoid signal aliasing.
4.3.1 The Powerful Transmier with A Signal Generator. We
utilize a smartphone as the signal source and the vector signal
generator described in Fig. 5 as the modulator. Note that the signal
generator has a sampling range of 300 MHz, much larger than
ultrasonic frequencies, and can modulate signals with predened
parameters. The speaker of the powerful transmitter is a wide-band
dynamic ultrasonic speaker named Vifa [9].
4.3.2 The Portable Transmier with a Smartphone. The portable
transmitter utilizes a smartphone to transmit the modulated signals.
Since we found that the best carrier frequencies for many devices
are larger than 24 kHz as is depicted in Tab. 3, a majority of smart-
phones cannot accomplish the task. Most smartphones support at
most a 48 kHz sampling rate and can only transmit a modulated
narrow-band signal with the carrier frequency of at most 24 kHz.
To build a portable transmitter that works for a wide range of VCSs,
we acquired a Samsung Galaxy S6 Edge, which supports a sampling
rate up to 192 kHz. Unfortunately, the on-board speaker of Sam-
sung Galaxy S6 attenuates the signal with a frequency larger than
20 kHz. To alleviate the problem, we use narrow-band ultrasonic
transducers [
56
] as the speaker and add an amplier prior to the
ultrasonic transducer as shown in Fig. 11. As such, the eective
attack range is extended.
5 FEASIBILITY EXPERIMENTS ACROSS VCS
We validate
DolphinAttack
experimentally on 16 popular voice
controllable systems and 7 speech recognition systems, and seek an-
swers to three questions: (a) Will the attacks work against dierent
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
109
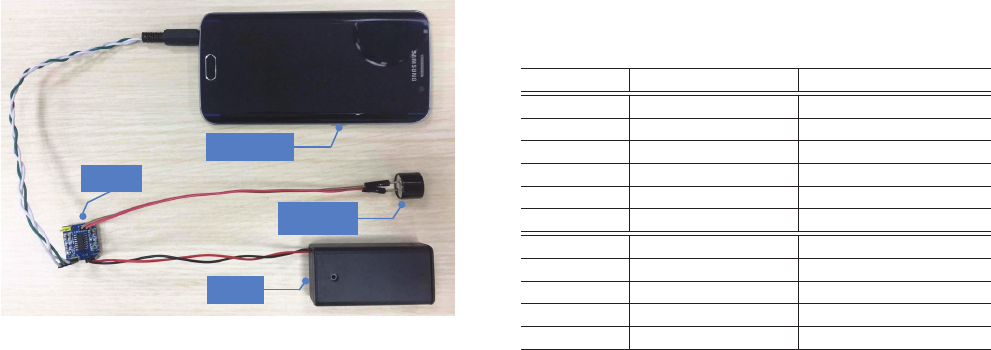
Figure 11: Portable attack implementation with a Samsung
Galaxy S6 Edge smartphone, an ultrasonic transducer and
a low-cost amplier. The total price for the amplier, the
ultrasonic transducer plus the battery is less than $3.
speech recognition systems on various operation systems and hard-
ware platforms? (b) How do dierent software and hardware aect
the performance of attacks? (c) What are the key parameters in
crafting a successful attack? This section describes the experiment
design, setup, and results in detail.
5.1 System Selection
We examine our
DolphinAttack
attacks on various state-of-the-
art speech recognition systems and o-the-shelf VCSs, which are
listed in Tab. 3. The list does not intend to be exhaustive, but rather
provides a representative set of VCSs that can be acquired for ex-
periments with our best eort.
Our approach in selecting the target systems is twofold — soft-
ware and hardware. First of all, we select major speech recognition
systems that are publicly available, e.g., Siri, Google Now, Alexa,
Cortana, etc. Unlike ordinary software, SR systems (especially pro-
prietary ones) are highly hardware and OS dependent. For example,
Siri can only be found and used on Apple products; Alexa is lim-
ited to Amazon devices; Cortana runs exclusively on Windows
machines. Nevertheless, we select and experiment on the hardware
whichever the SR systems are compatible with. To explore the hard-
ware inuence on the attack performance, we examine the attacks
on dierent hardware models running the same SR system, e.g., Siri
on various generations of iPhones.
In summary, we select VCS and SR systems that are popular on
the consumer market with active users and cover various applica-
tion areas and usage scenarios. In Tab. 3, we summarize the selected
VCSs for experiments, which can be classied into three categories
— personal devices (wearables, smartphones, tablets, computers),
smart home devices, and vehicles.
5.2 Experiment Setup
We test our attacks on each of the selected voice controllable system
and speech recognition system with the same experiment setup
Table 2: The list of systems and voice commands being tested
in Tab. 3.
Attack Device/System Command
Recognition Phones & Wearable Call 1234567890
Recognition iPad FaceTime 1234567890
Recognition MacBook & Nexus 7 Open dolphinattack.com
Recognition Windows PC Turn on airplane mode
Recognition Amazon Echo Open the back door
Recognition Vehicle (Audi Q3) Navigation
∗
Activation Siri Hey Siri
Activation Google Now Ok Google
Activation Samsung S Voice Hi Galaxy
Activation Huawei HiVoice Hello Huawei
∗
Activation Alexa Alexa
∗
The command is spoken in Chinese due to the lack of English support on these
devices.
and equipment, and report their behavior when injecting inaudible
voice commands with three goals:
• Examining the feasibility of attacks.
• Quantifying the parameters in tuning a successfully attack.
• Measuring the attack performance.
Equipment.
Unless specied, all experiments utilize the default
experiment equipment: a powerful transmitter as shown in Fig. 5,
which consists of a smartphone as the signal source, a signal gener-
ator as the modulator, and a wide-band dynamic ultrasonic speaker
named Vifa [
9
] as the speaker to play inaudible voice commands.
Since the powerful transmitter is able to transmit signals with a
wide range of carriers (from 9 kHz to 50 kHz), we use it for feasibility
study. In comparison, the portable transmitter utilizes narrow-band
speakers, and its transmission frequencies are limited by the avail-
able narrow-band speakers. In our case, our portable transmitter
can transmit signals at the frequencies of 23 kHz, 25 kHz, 33 kHz,
40 kHz, and 48 kHz.
Setup.
Unless constrained by the device size, we position the
selected device in front of our benchtop attack equipment at varying
distances on a table, with the device microphone facing right toward
the speaker. Both the device and the speaker are elevated to the same
heights (i.e., 10 cm above the table) to avoid mechanical coupling.
All experiments except the one with automobiles are conducted
in our laboratory with an average background noise of 55 dB SPL
(sound pressure level), and we conrm that no interfering sound
exists within the test frequency band (20 kHz – 50 kHz). We play
the inaudible voice commands through the powerful transmitter,
and observe the results on the device screen or from device acoustic
response.
Generally, multiple microphones are installed on a device to
pick up voices from all directions. It is a common case that all the
microphones are used in speech recognition. In our experiments,
we specically test the one that shows the best demodulation eect.
Voice Commands.
Two categories of voice commands are pre-
pared for two types of attacks, activation and recognition. For those
systems supporting voice activation, we try to activate them with
inaudible wake word commands. To examine whether the inaudible
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
110
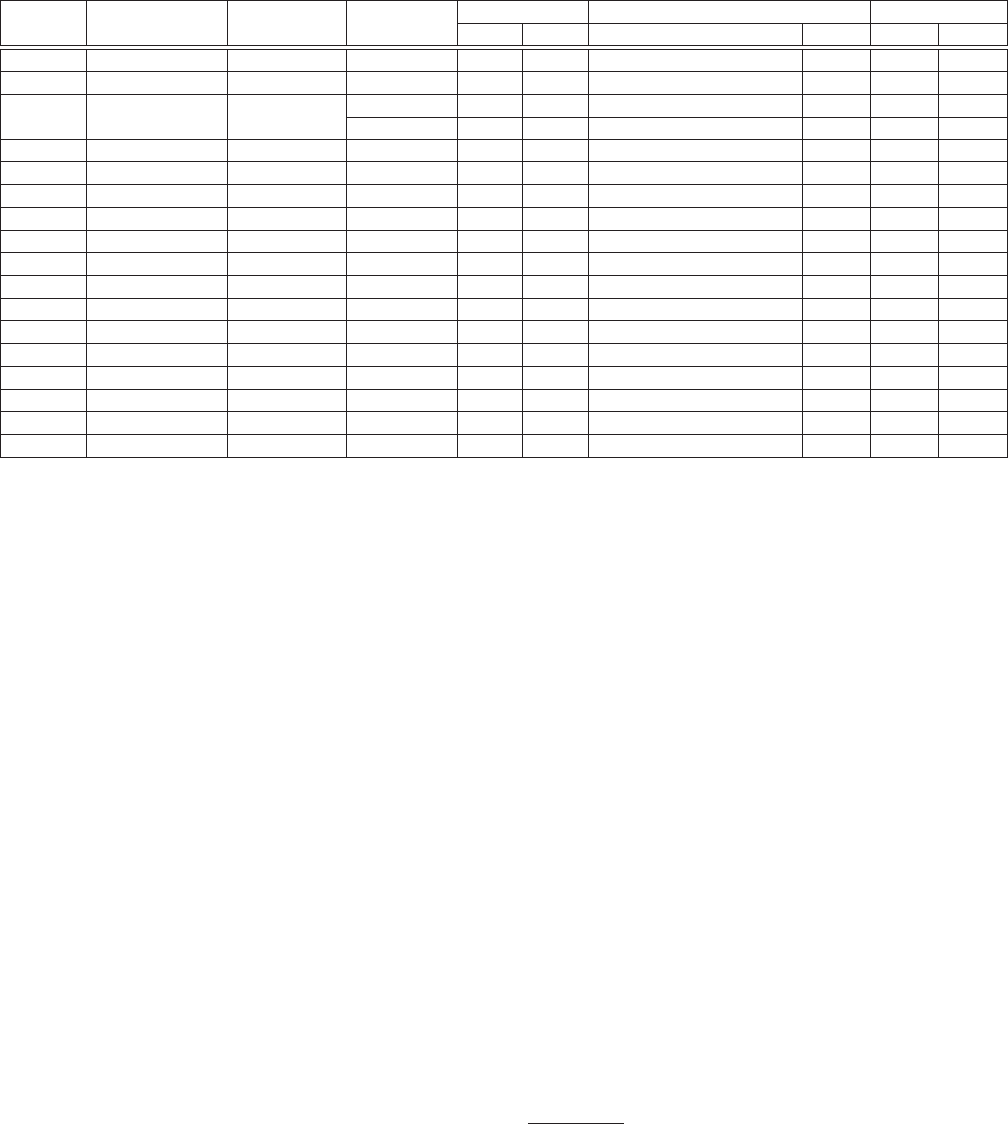
Table 3: Experiment devices, systems, and results.
The examined attacks include recognition (executing control commands when the
SR systems are manually activated) and activation (when the SR systems are unactivated). The modulation parameters and maximum attack
distances are acquired for recognition attacks in an oce environment with a background noise of 55 dB SPL on average.
Manuf. Model OS/Ver. SR System
Attacks Modulation Parameters Max Dist. (cm)
Recog. Activ. f
c
(kHz) & [Prime f
c
] ‡ Depth Recog. Activ.
Apple iPhone 4s iOS 9.3.5 Siri
√ √
20–42 [27.9] ≥ 9% 175 110
Apple iPhone 5s iOS 10.0.2 Siri
√ √
24.1 26.2 27 29.3 [24.1] 100% 7.5 10
Apple iPhone SE iOS 10.3.1
Siri
√ √
22–28 33 [22.6] ≥ 47% 30 25
Chrome
√
N/A 22–26 28 [22.6] ≥ 37% 16 N/A
Apple iPhone SE † iOS 10.3.2 Siri
√ √
21–29 31 33 [22.4] ≥ 43% 21 24
Apple iPhone 6s ∗ iOS 10.2.1 Siri
√ √
26 [26] 100% 4 12
Apple iPhone 6 Plus ∗ iOS 10.3.1 Siri ×
√
— [24] — — 2
Apple iPhone 7 Plus ∗ iOS 10.3.1 Siri
√ √
21 24-29 [25.3] ≥ 50% 18 12
Apple watch watchOS 3.1 Siri
√ √
20–37 [22.3] ≥ 5% 111 164
Apple iPad mini 4 iOS 10.2.1 Siri
√ √
22–40 [28.8] ≥ 25% 91.6 50.5
Apple MacBook macOS Sierra Siri
√
N/A 20-22 24-25 27-37 39 [22.8] ≥ 76% 31 N/A
LG Nexus 5X Android 7.1.1 Google Now
√ √
30.7 [30.7] 100% 6 11
Asus Nexus 7 Android 6.0.1 Google Now
√ √
24–39 [24.1] ≥ 5% 88 87
Samsung Galaxy S6 edge Android 6.0.1 S Voice
√ √
20–38 [28.4] ≥ 17% 36.1 56.2
Huawei Honor 7 Android 6.0 HiVoice
√ √
29–37 [29.5] ≥ 17% 13 14
Lenovo ThinkPad T440p Windows 10 Cortana
√ √
23.4–29 [23.6] ≥ 35% 58 8
Amazon Echo ∗ 5589 Alexa
√ √
20-21 23-31 33-34 [24] ≥ 20% 165 165
Audi Q3 N/A N/A
√
N/A 21–23 [22] 100% 10 N/A
‡
Prime
f
c
is the carrier wave frequency that exhibits highest baseband amplitude after demodulation. — No result
†
Another iPhone SE with identical technical spec.
∗
Experimented with the front/top microphones on devices.
voice commands can be correctly recognized by the speech recog-
nition systems, we select a few English commands that are human
intelligible as listed in Tab. 2. Since no commands are supported
across all devices, we prepare a set of commands to cover all devices.
For each command, we try two audio sources: the synthetic voices
from TTS engines, and the genuine human voices spoken by the
authors.
Sound Pressure Level.
Though the sound generated for at-
tacks are inaudible to human, we nonetheless measure the sound
pressure level (SPL) in decibels using a free eld measurement mi-
crophone [
50
]. The received SPL for the ultrasound is measured at
10 cm away from the Vifa [9] speaker and is 125 dB.
Attacks.
In recognition attacks, the SR systems are manually
activated beforehand. While in activation attacks, physical inter-
actions with the devices are not permitted. The attacks are only
considered successful and the distances are only recorded when
the recognized texts from SR systems totally match with the attack
commands.
Modulation Parameters.
We argue that the modulation pa-
rameters may have an inuence on the attack performance. We
consider two factors in the amplitude modulation: the carrier wave
frequency
f
c
and the modulation depth. To quantify their inuence,
we place the devices 10 cm away from the wide-band ultrasonic
speaker Vifa [9] using the Google TTS engine as the baseband au-
dio source, and measure three values: (a)
f
c
range — the range of
carrier wave frequency in which recognition attacks are successful
and 100% accurate. (b) Prime
f
c
— the
f
c
that exhibits the high-
est baseband
4
amplitude after demodulation. (c) AM depth — the
modulation depth at the prime
f
c
when recognition attacks are
successfully and 100% accurate.
5.3 Feasibility Results
Tab. 3 summarizes the experiment results. From Tab. 3, we can con-
clude that
DolphinAttack
works with nearly all of the examined
SR systems and devices. In particular, the inaudible voice commands
can be correctly interpreted by the SR systems on all the tested
hardware, and the activation is successful on all VCSs that require
activation. The results, however, do show that devices and systems
require various parameters to accomplish the same attack eect.
We discuss our ndings as follows.
Hardware Dependence.
The basic principle of
DolphinAttack
is to inject inaudible voice commands before digitization compo-
nents. Therefore, the feasibility of
DolphinAttack
depends heavily
on the audio hardware rather than the speech recognition systems.
For example, various devices from the same manufacturer running
Siri show the great variance in the attack success rate, the maximum
attack distance, and modulation parameters. This is because vari-
ous models adopt dierent hardware (e.g., microphones, ampliers,
lters), which lead to variation in the digitized audios that are input
to the same SR system. Our experiment on two identical devices
(iPhone SE) exhibits similar attack parameters and results. Thus, it
4
For simplicity, the baseband signal for nding prime
f
c
is a 400 Hz single tone which
resides in human voice frequency.
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
111
20 25 30 35 40 45
Carrier Wave Frequency (kHz)
-90
-80
-70
-60
-50
-40
-30
Amplitude (dB)
1st harmonic
2nd harmonic
3rd harmonic
Figure 12: Amplitude of the demodulated 400 Hz baseband
signal (1st harmonic) and its higher order harmonics on
Nexus 7, with varying carrier wave frequency f
c
.
is feasible for an adversary to study the hardware beforehand to
achieve satisfying attack results.
SR System Dependence.
We nd that various SR systems may
handle the same audios dierently. We tested the voice search in
Google Chrome running on an iPhone SE. The results in Table 3
show that the
f
c
range of Google Chrome overlaps with the
f
c
range in Siri experiment, which suggests that our attacks are hard-
ware dependent. However, the dierences in
f
c
, AM depth, and
recognition distances are resulted from the SR systems.
Recognition versus Activation.
Various devices and SR sys-
tems can react dierently to recognition and activation attacks in
terms of the attack distance. For some devices (8 devices), activa-
tion attacks can be achieved at a larger distance than recognition
attacks, while for other devices (6 devices), the eective range of
successful activation attacks is smaller than the recognition attacks.
In addition, we observe that for many of the devices, appending
the activation commands (e.g., “Hey Siri”) before the control com-
mands can increase the probability for correct recognition, possibly
because the activation commands are trained specially by the SR
systems to be recognized in the always-on mode.
Commands Matter.
The length and content of a voice com-
mand can inuence the success rate and the maximum distance
of attacks. We are rigorous in the experiments by demanding ev-
ery single word within a command to be correctly recognized,
though this may be unnecessary for some commands. For instance,
“Call/FaceTime 1234567890” and “Open dolphinattack.com” is harder
to be recognized than “Turn on airplane mode” or “How’s the
weather today?”. In the former scenarios, both the execution words
“call”, “open” and the content (number, url) have to be correctly
recognized. However, for the latter scenarios, only recognizing
key words such as “airplane” and “weather” shall be enough for
executing the original commands. The attack performance can
be improved if the attack command is short and common to SR
systems.
Carrier Wave Frequency. f
c
is the dominant factor that aects
the attack success rate, and it also shows great variation across
devices. For some devices, the
f
c
range within which recognition
0 10203040506070809010
0
AM Depth (%)
-85
-80
-75
-70
-65
-60
-55
-50
-45
Amplitude (dB)
1st harmonic
2nd harmonic
3rd harmonic
Figure 13: Amplitude of the demodulated 400 Hz baseband
signal (1st harmonic) and its higher order harmonics on
Nexus 7, with varying modulation depth.
attacks are successful can be as wide as 20–42 kHz (e.g., iPhone
4s), or as narrow as a few single frequency points (e.g., iPhone 5s).
We attribute this diversity to the dierence of frequency response
and frequency selectivity for these microphones as well as the
nonlinearity of audio processing circuits.
For instance, the
f
c
range of Nexus 7 is from 24 to 39 kHz, which
can be explained from two aspects. The
f
c
is no higher than 39 kHz
because the frequency response of the Vifa speaker over 39 kHz is
low and the one of Nexus 7 microphone is low as well. Thus, in com-
bination, a carrier higher than 39 kHz is no longer ecient enough
to inject inaudible voice commands. The
f
c
cannot be smaller than
24 kHz because of the nonlinearity of the microphone frequency
response. We observe that the inaudible voice commands become
unacceptable to SR systems when the amplitude of the harmonics
of the baseband are larger than the one of baseband. For instance,
given the baseband of a 400 Hz tone, we measure the demodu-
lated signal (i.e., the 400 Hz baseband) on a Nexus 7, and observe
harmonics at 800 Hz (2nd harmonic), 1200 Hz (3rd harmonic) and
even higher, which are possibly caused by the nonlinearity of audio
processing circuits. As shown in Fig. 12, when the
f
c
is less than
23 kHz, the 2nd and 3rd harmonics are stronger than the 1st har-
monic, which will distort the baseband signal and make it hard for
SR systems to recognize. The Prime
f
c
that leads to the best attack
performance, is the frequency that exhibits both a high baseband
signal and low harmonics. On Nexus 7, the Prime f
c
is 24.1 kHz.
Modulation Depth.
Modulation depth aects the amplitude of
demodulated baseband signal and its harmonics, as shown in Fig. 13.
As the modulation depth gradually increases from 0 to 100%, the
demodulated signals become stronger, which in turn increase the
SNR and the attack success rate, with a few exceptions (e.g., when
the harmonics distort the baseband signal more than the cases of
a lower AM depth). We report the minimum depth for successful
recognition attacks on each device in Tab. 3.
Attack Distance.
The attack distances vary from 2 cm to a
maximum value of 175 cm and show a great variation across devices.
Notably, the maximum distance that we can achieve for both attacks
is 165 cm on Amazon Echo. We argue that the distance can be
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
112

Hey Siri Call 1234567890 Turn on airplane mode
0.0
0.2
0.4
0.6
0.8
1.0
Recognition rate
English
Chinese
German
French
Spanish
Figure 14: The recognition rates of voice commands in ve
languages.
increased with the equipment that can generate a sound with higher
pressure levels and exhibit better acoustic directionality, or by using
shorter and more recognizable commands.
Eorts and Challenges.
We faced challenges in conducting
the above experiments. Apart from acquiring the devices, measur-
ing each parameter is time-consuming and labor-intensive due to
the lack of audio measurement feedback interface. For example, to
measure the Prime
f
c
, we analyze the demodulation results on vari-
ous devices using audio spectrum analyzing software on dierent
platforms: iOS [
30
], macOS [
34
], Android [
41
], and Windows [
35
].
For devices not supporting installing spectrum software such as
Apple watch and Amazon Echo, we utilize the calling and command
log playback function, and measure the audio on another relaying
device.
5.4 Summary
We summarize our experiments as follows.
(1)
We validated recognition and activation attacks across 16
various devices and 7 speech recognition systems, and suc-
ceeded on nearly all of them.
(2)
We measured the attack performance on all devices, and
some of them suce for real attacks in daily scenarios. For
instance, we can launch
DolphinAttack
from almost 2 me-
ters away against an iPhone 4s and Amazon Echo.
(3)
We measured, examined, and discussed the parameters in-
volved in the attack performance, including SR systems, de-
vice hardware, voice commands, f
c
, AM depth, etc.
6 IMPACT QUANTIFICATION
In this section, we evaluate the performance of
DolphinAttack
in
terms of languages, background noises, sound pressure levels, and
attack distances using the powerful transmitter (i.e., the benchtop
setup shown in Fig. 5). In addition, we evaluate the eectiveness of
walk-by attacks using the portable devices.
6.1 Inuence of Languages
To examine the eectiveness of
DolphinAttack
with regard to
languages, we select three voice commands in ve languages. The
voice commands include an activation command (“Hey Siri”) and
two control commands (“Call 1234567890” and “Turn on airplane
Table 4: The impact of background noises for sentence recog-
nition evaluated with an Apple watch.
Scene Noises (dB)
Recognition rates
Hey Siri Turn on airplane mode
Oce 55–65 100% 100%
Cafe 65–75 100% 80%
Street 75–85 90% 30%
mode”), which represent three attacks against SR systems: activat-
ing SR systems, initiating to spy on the user, and denial of service
attacks. Each voice command is tested in English, Chinese, German,
French, and Spanish, respectively.
We launch
DolphinAttack
against an Apple watch that is paired
with an iPhone 6 Plus running iOS 10.3.1. For each voice command
in each language, we repeat it for 10 times and calculate the average
success rate. The distance is set to 20 cm, the measured background
noise is 55 dB. We exploit a 25 kHz carrier frequency and 100% AM
depth.
Fig. 14 shows the recognition results of the three voice commands
in the given languages. As we can see that the recognition rate
of various languages and voice commands are almost the same.
In particular, the recognition rate of all the voice commands in
English and Spanish is 100%, and the average recognition rate of
the three voice commands across all languages are 100%, 96%, 98%,
respectively. Moreover, the recognition rate for activation (i.e., “Hey
Siri”) is higher than the one of control commands “Call 1234567890”
and “Turn on airplane mode”). This is because the length of the
activation command is shorter than the control commands. In any
case, the results show that our approach is eective for various
languages and voice commands.
6.2 Impact of Background Noises
Speech recognition is known to be sensitive to background noises
and is recommended to be used in a quiet environment. Thus, we
examine inaudible voice command injection via
DolphinAttack
in three scenarios: at an oce, in a cafe, and on the street. To
ensure that the experiment can be repeatable, we simulate the
three scenarios by playing background sounds at a chosen SPL and
evaluate their impact on the recognition rates. We choose an Apple
watch as the attack target, and measure the background noise by a
mini sound meter.
From Tab. 4, we can see that recognition rates for activation com-
mand are over 90% for all the three scenes while the recognition
rates of the control command (“Turn on airplane mode”) decrease
with the increase of ambient noise levels. That is because the ac-
tivation command is shorter than the control command. With the
increase of the word count for a control command, the recognition
rate drops quickly because failure to recognize any word could
render the command recognition unsuccessful.
6.3 Impact of Sound Pressure Levels
For both audible and inaudible sounds, a higher SPL leads to a
better quality of recorded voices and thus a higher recognition rate.
This is because a higher SPL always means a larger signal-to-noise
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
113
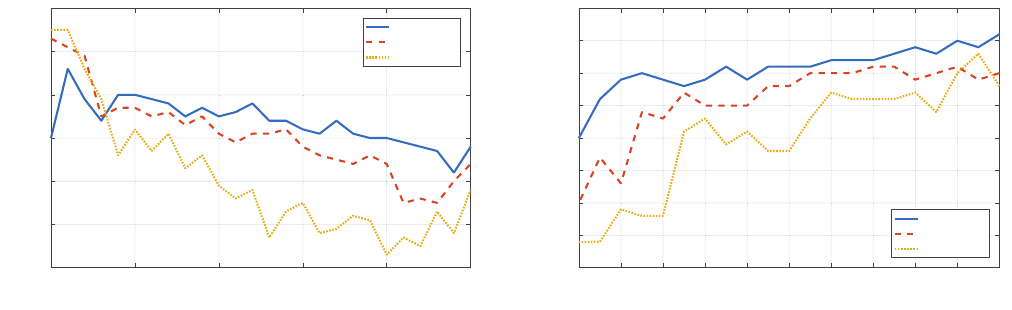
112.0 112.5 113.0 113.5 114.0 114.5
SPL (dB)
0.0
0.2
0.4
0.6
0.8
1.0
Recognition rate
11 Words Sentence
Words
(a) The recognition rates of the Galaxy S6 Edge
98 100 102 104 106 108
SPL (dB)
0.0
0.2
0.4
0.6
0.8
1.0
Recognition rate
11 Words Sentence
Words
(b) The recognition rates of the Apple watch
Figure 15: The impact of sound pressure levels on the recognition rates for two portable devices.
24 26 28 30 32 34 36 38 40
Distance (cm)
0.0
0.2
0.4
0.6
0.8
1.0
Recognition rate
Call 1..0
Hi Galaxy
(a) The recognition rates of the Galaxy S6 Edge
70 80 90 100 110 120
Distance (cm)
0.0
0.2
0.4
0.6
0.8
1.0
Recognition rate
Call 1..0
Hey Siri
(b) The recognition rates of the Apple watch
Figure 16: The impact of attack distances on the recognition rates for two portable devices.
ratio (SNR) for given noise levels. To explore the impact of SPLs on
DolphinAttack
, we test the control command (“Call 1234567890”)
on both the Apple watch and a Galaxy S6 Edge smartphone. In all
experiments, the speaker is placed 10 cm from the target device, and
the mini sound meter is placed alongside the speaker to measure
the environment noise.
We quantify the impact of SPLs with two granularities: sentence
recognition rates and word recognition rates. Sentence recognition
rates calculate the percentage of successfully recognized commands.
Only if every word in the command is recognized correctly, the
command is considered to be recognized. Word recognition rates are
the percentage of words that are correctly interpreted. For example,
if the command “call 1234567890” is recognized as “call 1234567”,
the words recognition rate is 63.6% (7/11).
Fig. 15 (a) (b) show the impact of the SPLs on both types of
recognition rates. Not surprisingly, given the same SPL, the word
recognition rates are always larger than the sentence recognition
rates until both reach 100%. For the Apple watch, both recognition
rates become 100% once the SPL is larger than 106.2 dB. In compar-
ison, the minimum SPL for the Galaxy S6 Edge to achieve a 100%
recognition rate is 113.96 dB, which is higher than that of the Apple
watch. This is because the Apple watch outperforms the Galaxy S6
Edge in terms of demodulating inaudible voice commands.
6.4 Impact of Attack Distances
In this section, an activation command (either “Hey Siri” or “Hi
Galaxy”) and a control command (“Call 1234567890”) are used to
test the recognition rates at various distances. We evaluate the
recognition rates of two commands on an Apple watch and a Galaxy
S6 Edge, and we depict the results in Fig. 16.
In general, the recognition rates of the activation command are
higher than that of the control command, because the activation
command contains a smaller number of words than the control
command. The Apple watch can be activated with a success rate of
100% from 100 cm away, and the Galaxy S6 Edge can be activated
with 100% from 25 cm. We believe that the dierence between the
two devices is because Apple watches are worn on the wrist and
are designed to accept voice commands from a longer distance than
a smartphone.
6.5 Evaluation of Portable Device Attacks
In this section, we evaluate the eectiveness of portable device
attacks.
Setup
. We use the Galaxy S6 Edge smartphone running Android
6.0.1 as the attack device and an Apple watch as the victim device
which is paired with an iPhone 6 Plus. The attack voice command is
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
114
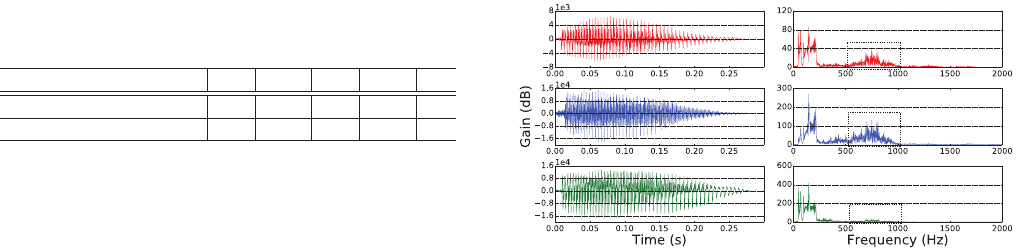
Table 5: Portable device attack results. Attacking an Apple
watch using a Galaxy S6 Edge smartphone that is 2 cm away.
f
c
(kHz) 20 21 22 23 24
Word recognition rate 80% 100% 16% 100% 0%
Sentence recognition rate 80% 100% 0% 100% 0%
“turn on airplane mode”. We set
f
c
to be {20, 21, 22, 23, 24} kHz, re-
spectively. The AM depth is 100%, and the sampling rate is 192 kHz.
The baseband signal has a maximum frequency of 3 kHz.
Results
. As shown in Tab. 5, we successfully “turned on airplane
mode” on the Apple watch at the 23 kHz carrier frequency. Note
that 20 kHz and 21 kHz are also successful. However, there are
frequency leakages below 20 kHz and it sounds like crickets and
can be heard. The word and sentence recognition rates are 100%.
With the increase of
f
c
, the Apple watch fails to recognize the voice
command because of frequency selectivity of the speaker.
To extend the attack distance, we utilize a low-power audio am-
plier (3 Watt) module to drive an ultrasonic transducer, as is shown
in Fig. 11. With the amplier module, the maximum distance of
eective attacks is increased to 27 cm. Note that the attack dis-
tance can be further extended with professional devices and more
powerful ampliers.
The adversary can launch a remote attack utilizing a victim’s de-
vice. For example, an adversary can upload an audio or video clip in
which the voice commands are embedded in a website, e.g. YouTube.
When the audio or video is played by the victims’ devices, the sur-
rounding voice controllable systems such as Google Home assistant,
Alexa, and mobile phones may be triggered unconsciously.
7 DEFENSES
In this section, we discuss the defense strategies to address the
aforementioned attacks from both the hardware and software per-
spectives.
7.1 Hardware-Based Defense
We propose two hardware-based defense strategies: microphone
enhancement and baseband cancellation.
Microphone Enhancement.
The root cause of inaudible voice
commands is that microphones can sense acoustic sounds with a
frequency higher than 20 kHz while an ideal microphone should not.
By default, most MEMS microphones on mobile devices nowadays
allow signals above 20 kHz [
2
,
3
,
29
,
52
,
53
]. Thus, a microphone
shall be enhanced and designed to suppress any acoustic signals
whose frequencies are in the ultrasound range. For instance, the
microphone of iPhone 6 Plus can resist to inaudible voice commands
well.
Inaudible Voice Command Cancellation.
Given the legacy
microphones, we can add a module prior to LPF to detect the mod-
ulated voice commands and cancel the baseband with the mod-
ulated voice commands. In particular, we can detect the signals
within the ultrasound frequency range that exhibit AM modulation
characteristics, and demodulate the signals to obtain the baseband.
For instance, in the presence of inaudible voice command injec-
tion, besides the demodulated baseband signals
m(t)
, the recorded
Figure 17: Original (top), recorded (middle) and recovered
(bottom) voice signals. The modulated voice command dif-
fers from both the original signal and the recorded one in
the frequency range between 500 and 1000 Hz.
analog voice signals shall include the original modulated signal:
v(t) = Am(t)cos(
2
πf
c
t) + cos(
2
πf
c
t),
where
A
is the gain for the
input signal
m(t)
. By down-converting
v(t)
to obtain
Am(t)
and
adjusting the amplitude, we can subtract the baseband signal. Note
that such a command cancellation procedure will not aect the
normal operation of a microphone, since there will be no correla-
tion between the captured audible voice signals and noises in the
ultrasound range.
7.2 Software-Based Defense
Software-based defense looks into the unique features of modulated
voice commands which are distinctive from genuine ones.
As shown in Fig. 17, the recovered (demodulated) attack signal
shows dierences from both the original signal and the recorded
one in the high frequency ranging from 500 to 1000 Hz. The original
signal is produced by the Google TTS engine, the carrier frequency
for modulation is 25 kHz. Thus, we can detect
DolphinAttack
by
analyzing the signal in the frequency range from 500 to 1000 Hz.
In particular, a machine learning based classier shall detect it.
To validate the feasibility of detecting
DolphinAttack
, we utilize
supported vector machine (SVM) as the classier, and extracted
15 features in the time and frequency domains from audios. We
generated 12 voice commands (i.e., “Hey Siri”): 8 types of voices
from the NeoSpeech TTS engine and 4 types of voices from the
Selvy TTS engine. With each type, we obtained two samples: one is
recorded and the other is recovered. In total, we have 24 samples. To
train a SVM classier, we use 5 recorded audios as positive samples
and 5 recovered audios as negative samples. The rest 14 samples are
used for testing. The classier can distinguish the recovered audios
from recorded ones with 100% true positive rate (7/7) and 100%
true negative rate (7/7). The result using a simple SVM classier
indicating that software-based defense strategy can be used to
detect DolphinAttack.
8 RELATED WORK
Security of voice controllable systems.
An increasing amount
of research eort is devoted into studying the security of voice
controllable systems [
10
,
18
,
28
,
38
,
61
]. Kasmi et al. [
28
] introduced
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
115
a voice command injection attack against modern smartphones by
applying intentional electromagnetic interference on headphone
cables, while in this paper, we inject voice commands by utilizing
the nonlinearity of microphones over ultrasounds. Mukhopadhyay
et al. [
38
] demonstrated voice impersonation attacks on state-of-
the-art automated speaker verication algorithms. They built a
model of the victim’s voice based on the samples from the victim.
Diao et al. [
18
] designed permission bypass attacks from a zero-
permission Android application through phone speakers. Hidden
voice commands and Cocaine noodles [
10
,
61
] use audible and man-
gled audio commands to attack speech recognition systems. Under
these attacks, the victims can observe the obfuscated voice com-
mands sometimes.
DolphinAttack
is motivated by these attacks,
but is completely inaudible and imperceptible and we show it is
possible to launch DolphinAttack using portable devices.
Security of sensor-equipped devices.
Commercial devices
equipped with various sensors (e.g., smartphones, wearables, and
tablets) are gaining their popularity. Along with the growing trend
of ubiquitous mobile devices are the security concerns. Many re-
searchers [
14
,
15
,
46
,
60
] focus on studying possible attacks against
sensors on smart devices. Among which, sensor spoong (i.e., the
injection of a malicious signal into a victim sensor) has attracted
much attention and is considered one of the most critical threats
to sensor-equipped devices. Shin et al. investigate and classify sen-
sor spoong attacks [
46
] into three categories: regular channel
attacks (replay attack) [
19
,
26
,
66
], transmission channel attacks,
and side channel attacks [
11
,
14
,
15
,
47
,
49
]. Dean et al. [
14
,
15
]
demonstrated that MEMS gyroscopes are susceptible to high-power
high-frequency acoustic noises when acoustic frequency compo-
nents are close to the resonating frequency of the gyroscope’s
sensing mass. Utilizing on-board sensors, Gu et al. [
24
] designed a
cryptographic key generation mechanism by using vibration mo-
tors and accelerometers. Our work focuses on microphones, which
can be considered as one type of sensors.
Privacy leakage through sensors.
Michalevsky et al. [
36
] uti-
lized MEMS gyroscopes to measure acoustic signals, which reveal
the speaker information. Schlegel et al. [
44
] designed a Trojan that
can extract high-value data from audio sensors of smartphones.
Owusu et al. [
40
] utilized the accelerometer readings as a side
channel to extract the entire sequences of entered text on a smart-
phone touchscreen keyboard without requiring special privileges.
Aviv et al. [
6
] demonstrated that accelerometer sensors can reveal
user taps and gesture-based input. Dey et al. [
17
] studied how to
ngerprint smartphones utilizing the imperfections of on-board
accelerometers, and the ngerprints can act as an identier to track
the smartphone’s owner. Simon et al. [
48
] utilized video cameras
and microphones to infer PINs entered on a number-only soft key-
board on a smartphone. Li et al. [
33
] can verify the capture time and
location of the photos with the sun position estimated based on the
shadows in the photo and sensor readings of the cameras. Sun et
al. [55] presented a video-assisted keystroke inference framework
to infer a tablet user’s inputs from surreptitious video recordings of
the tablet motion. Backes et al. [
7
] showed it is possible to recover
what a dot matrix printer processing English text is printing based
on the printer’s acoustic noises. Similarly, we study how to utilize
microphone vulnerabilities for security and privacy breaches.
Roy et al. [
42
] presented BackDoor, which constructs an acous-
tic (but inaudible) communication channel between two speakers
and a microphone over ultrasound bands. In particular, BackDoor
utilizes two ultrasonic speakers to transmit two frequencies. Af-
ter passing through the microphone’s non-linear diaphragm and
power-amplier, the two signals create a “shadow” in the audible
frequency range, which could carry data. However, the “shadow” is
a single tone instead of a voice command that consists of a rich set
of tones. In comparison, we show it is possible to use one speaker to
inject inaudible commands to SR systems, causing various security
and privacy issues.
9 CONCLUSION
In this paper, we propose
DolphinAttack
, an inaudible attack to SR
systems.
DolphinAttack
leverages the AM (amplitude modulation)
technique to modulate audible voice commands on ultrasonic carri-
ers by which the command signals can not be perceived by human.
With
DolphinAttack
, an adversary can attack major SR systems
including Siri, Google Now, Alexa, and etc. To avoid the abuse of
DolphinAttack
in reality, we propose two defense solutions from
the aspects of both hardware and software.
ACKNOWLEDGMENTS
This work has been funded in part by 360 Technology Inc., NSFC
61472358, NSFC 61702451, NSF CNS-0845671, and the Fundamental
Research Funds for the Central Universities 2017QNA4017.
REFERENCES
[1]
Muhammad Taher Abuelma’atti. 2003. Analysis of the eect of radio frequency
interference on the DC performance of bipolar operational ampliers. IEEE
Transactions on Electromagnetic Compatibility 45, 2 (2003), 453–458.
[2]
Akustica. 2014. AKU143 Top Port, analog silicon MEMS microphone. http://www.
mouser.com/ds/2/720/DS37-1.01%20AKU143%20Datasheet-552974.pdf. (2014).
[3]
Akustica. 2014. AKU242 digital silicon MEMS microphone. http://www.mouser.
com/ds/2/720/PB24-1.0%20-%20AKU242%20Product%20Brief-770082.pdf. (2014).
[4] Amazon. 2017. Alexa. https://developer.amazon.com/alexa. (2017).
[5] Apple. 2017. iOS-Siri-Apple. https://www.apple.com/ios/siri/. (2017).
[6]
Adam J. Aviv, Benjamin Sapp, Matt Blaze, and Jonathan M. Smith. 2012. Prac-
ticality of accelerometer side channels on smartphones. In Proceedings of the
Computer Security Applications Conference. 41–50.
[7]
Michael Backes, Markus Dürmuth, Sebastian Gerling, Manfred Pinkal, and Caro-
line Sporleder. 2010. Acoustic side-channel attacks on printers.. In Proceedings of
the USENIX Security Symposium. 307–322.
[8] Baidu. 2017. Baidu Translate. http://fanyi.baidu.com/. (2017).
[9]
Avisoft Bioacoustics. 2017. Ultrasonic Dynamic Speaker Vifa. http://www.avisoft.
com/usg/vifa.htm. (2017).
[10]
Nicholas Carlini, Pratyush Mishra, Tavish Vaidya, Yuankai Zhang, Micah Sherr,
Clay Shields, David Wagner, and Wenchao Zhou. 2016. Hidden voice commands.
In Proceedings of the USENIX Security Symposium.
[11]
Simon Castro, Robert Dean, Grant Roth, George T Flowers, and Brian Grantham.
2007. Inuence of acoustic noise on the dynamic performance of MEMS gyro-
scopes. In Proceedings of the ASME International Mechanical Engineering Congress
and Exposition. American Society of Mechanical Engineers, 1825–1831.
[12] CereProc. 2017. CereProc Text-to-Speech. https://www.cereproc.com/. (2017).
[13]
Gordon KC Chen and James J Whalen. 1981. Comparative RFI performance of
bipolar operational ampliers. In Proceedings of the IEEE International Symposium
on Electromagnetic Compatibility. IEEE, 1–5.
[14]
Robert Neal Dean, Simon Thomas Castro, George T Flowers, Grant Roth, Anwar
Ahmed, Alan Scottedward Hodel, Brian Eugene Grantham, David Allen Bittle,
and James P Brunsch. 2011. A characterization of the performance of a MEMS
gyroscope in acoustically harsh environments. IEEE Transactions on Industrial
Electronics 58, 7 (2011), 2591–2596.
[15]
Robert N Dean, George T Flowers, A Scotte Hodel, Grant Roth, Simon Castro,
Ran Zhou, Alfonso Moreira, Anwar Ahmed, Rifki Rifki, Brian E Grantham, et al
.
2007. On the degradation of MEMS gyroscope performance in the presence of
high power acoustic noise. In Proceedings of the IEEE International Symposium on
Industrial Electronics. 1435–1440.
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
116
[16]
Analog Devices. 2011. ADMP401: Omnidirectional microphone with bottom
port and analog output obsolete data sheet. http://www.analog.com/media/en/
technical-documentation/obsolete-data-sheets/ADMP401.pdf. (2011).
[17]
Sanorita Dey, Nirupam Roy, Wenyuan Xu, Romit Roy Choudhury, and Srihari
Nelakuditi. 2014. AccelPrint: Imperfections of Accelerometers Make Smart-
phones Trackable.. In Proceedings of the Network and Distributed System Security
Symposium (NDSS).
[18]
Wenrui Diao, Xiangyu Liu, Zhe Zhou, and Kehuan Zhang. 2014. Your voice
assistant is mine: How to abuse speakers to steal information and control your
phone. In Proceedings of the ACM Workshop on Security and Privacy in Smartphones
& Mobile Devices. ACM, 63–74.
[19]
Aurélien Francillon, Boris Danev, and Srdjan Capkun. 2011. Relay attacks on
passive keyless entry and start systems in modern cars. In Proceedings of the
Network and Distributed System Security Symposium (NDSS).
[20]
Javier Gago, Josep Balcells, David GonzÁlez, Manuel Lamich, Juan Mon, and
Alfonso Santolaria. 2007. EMI susceptibility model of signal conditioning circuits
based on operational ampliers. IEEE Transactions on Electromagnetic Compati-
bility 49, 4 (2007), 849–859.
[21]
Google. 2016. Google Now. http://www.androidcentral.com/google-now. (2016).
[22]
Acapela Group. 2017. Acapela text to speech demo. http://www.acapela-group.
com/. (2017).
[23]
CMU Speech Group. 2012. Statistical parametirc sythesis and voice conversion
techniques. http://festvox.org/11752/slides/lecture11a.pdf. (2012).
[24]
Weixi Gu, Zheng Yang, Longfei Shangguan, Xiaoyu Ji, and Yiyang Zhao. 2014.
Toauth: Towards automatic near eld authentication for smartphones. In Pro-
ceedings of the IEEE 13th International Conference on Trust, Security and Privacy
in Computing and Communications (TrustCom). IEEE, 229–236.
[25]
Paul Horowitz and Wineld Hill. 1989. The art of electronics. Cambridge Univ.
Press.
[26]
Rob Millerb Ishtiaq Roufa, Hossen Mustafaa, Sangho Ohb Travis Taylora,
Wenyuan Xua, Marco Gruteserb, Wade Trappeb, and Ivan Seskarb. 2010. Se-
curity and privacy vulnerabilities of in-car wireless networks: A tire pressure
monitoring system case study. In Proceedings of the USENIX Security Symposium.
11–13.
[27]
Chadawan Ittichaichareon, Siwat Suksri, and Thaweesak Yingthawornsuk. 2012.
Speech recognition using MFCC. In Proceedings of the International Conference
on Computer Graphics, Simulation and Modeling (ICGSM). 28–29.
[28]
Chaouki Kasmi and Jose Lopes Esteves. 2015. IEMI threats for information
security: Remote command injection on modern smartphones. IEEE Transactions
on Electromagnetic Compatibility 57, 6 (2015), 1752–1755.
[29]
Knowles. 2013. SPU0410LR5H-QB Zero-Height SiSonicTM Microphone. http:
//www.mouser.com/ds/2/218/-532675.pdf. (2013).
[30]
Dexus Pawel Krzywdzinski. 2017. Ultrasonic analyzer for iPad and iPhone.
http://iaudioapps.com/page1/page1.html. (2017).
[31]
Denis Foo Kune, John Backes, Shane S Clark, Daniel Kramer, Matthew Reynolds,
Kevin Fu, Yongdae Kim, and Wenyuan Xu. 2013. Ghost talk: Mitigating EMI signal
injection attacks against analog sensors. In Proceedings of the IEEE Symposium
on Security and Privacy (S&P). IEEE, 145–159.
[32]
Hyewon Lee, Tae Hyun Kim, Jun Won Choi, and Sunghyun Choi. 2015. Chirp
signal-based aerial acoustic communication for smart devices. In Proceedings
of the IEEE International Conference on Computer Communications (INFOCOM).
IEEE, 2407–2415.
[33]
Xiaopeng Li, Wenyuan Xu, Song Wang, and Xianshan Qu. 2017. Are You Lying:
Validating the Time-Location of Outdoor Images. In Proceedings of the Inter-
national Conference on Applied Cryptography and Network Security. Springer,
103–123.
[34]
Dog Park Software Ltd. 2017. iSpectrum - Macintosh Audio Spectrum Analyzer.
https://dogparksoftware.com/iSpectrum.html. (2017).
[35]
Ivo Mateljan. 2017. Audio measurement and analysis software. http://www.
artalabs.hr/. (2017).
[36]
Yan Michalevsky, Dan Boneh, and Gabi Nakibly. 2014. Gyrophone: Recognizing
Speech from Gyroscope Signals. In Proceedings of the USENIX Security Symposium.
1053–1067.
[37]
Microsoft. 2017. What is Cortana? https://support.microsoft.com/en-us/help/
17214/windows-10-what-is. (2017).
[38]
Dibya Mukhopadhyay, Maliheh Shirvanian, and Nitesh Saxena. 2015. All your
voices are belong to us: Stealing voices to fool humans and machines. In Pro-
ceedings of the European Symposium on Research in Computer Security. Springer,
599–621.
[39]
NeoSpeech. 2017. NeoSpeech Text-to-Speech. http://www.neospeech.com/.
(2017).
[40]
Emmanuel Owusu, Jun Han, Sauvik Das, Adrian Perrig, and Joy Zhang. 2006.
ACCessory: password inference using accelerometers on smartphones. (2006).
[41]
Carl Reinke. 2017. Spectroid. https://play.google.com/store/apps/details?id=org.
intoorbit.spectrum&hl=en. (2017).
[42]
Nirupam Roy, Haitham Hassanieh, and Romit Roy Choudhury. 2017. Backdoor:
Making microphones hear inaudible sounds. In Proceedings of the 15th Annual
International Conference on Mobile Systems, Applications, and Services. ACM, 2–14.
[43]
Samsung. 2017. What is S Voice? http://www.samsung.com/global/galaxy/
what-is/s-voice/. (2017).
[44]
Roman Schlegel, Kehuan Zhang, Xiao-yong Zhou, Mehool Intwala, Apu Kapadia,
and XiaoFeng Wang. 2011. Soundcomber: A Stealthy and Context-Aware Sound
Trojan for Smartphones. In Proceedings of the Network and Distributed System
Security Symposium (NDSS), Vol. 11. 17–33.
[45] Sestek. 2017. Sestek TTS. http://www.sestek.com/. (2017).
[46]
Hocheol Shin, Yunmok Son, Youngseok Park, Yujin Kwon, and Yongdae Kim. 2016.
Sampling race: bypassing timing-based analog active sensor spoong detection
on analog-digital systems. In Proceedings of the USENIX Workshop on Oensive
Technologies (WOOT). USENIX Association.
[47]
Yasser Shoukry, Paul Martin, Paulo Tabuada, and Mani Srivastava. 2013. Non-
invasive spoong attacks for anti-lock braking systems. In Proceedings of the Inter-
national Workshop on Cryptographic Hardware and Embedded Systems. Springer,
55–72.
[48]
Laurent Simon and Ross Anderson. 2013. PIN skimmer: inferring PINs through
the camera and microphone. In Proceedings of the ACM Workshop on Security and
Privacy in Smartphones & Mobile Devices. 67–78.
[49]
Yunmok Son, Hocheol Shin, Dongkwan Kim, Young-Seok Park, Juhwan Noh,
Kibum Choi, Jungwoo Choi, Yongdae Kim, et al
.
2015. Rocking drones with
intentional sound noise on gyroscopic sensors. In Proceedings of the USENIX
Security Symposium. 881–896.
[50]
Cry Sound. 2017. CRY343 free eld measurment microphone. http://www.
crysound.com/product_info.php?4/35/63. (2017).
[51]
Selvy Speech. 2017. Demo-Selvy TTS. http://speech.selvasai.com/en/
text-to-speech-demonstration.php. (2017).
[52]
STMicroelectronics. 2014. MP23AB02BTR MEMS audio sensor, high-
performance analog bottom-port microphone. http://www.mouser.com/ds/2/
389/mp23ab02b-955093.pdf. (2014).
[53]
STMicroelectronics. 2016. MP34DB02 MEMS audio sensor omnidirectional digital
microphone. http://www.mouser.com/ds/2/389/mp34db02-955149.pdf. (2016).
[54]
STMicroelectronics. 2017. Tutorial for MEMS microphones. http:
//www.st.com/content/ccc/resource/technical/document/application_
note/46/0b/3e/74/cf/fb/4b/13/DM00103199.pdf/les/DM00103199.pdf/jcr:
content/translations/en.DM00103199.pdf. (2017).
[55]
Jingchao Sun, Xiaocong Jin, Yimin Chen, Jinxue Zhang, Yanchao Zhang, and Rui
Zhang. 2016. VISIBLE: Video-Assisted keystroke inference from tablet backside
motion. In Proceedings of the Network and Distributed System Security Symposium
(NDSS).
[56]
Jinci Technologies. 2017. Open structure product review. http://www.jinci.cn/
en/goods/112.html. (2017).
[57]
Keysight Technologies. 2017. N5172B EXG X-Series RF Vector Signal Generator,
9 kHz to 6 GHz. http://www.keysight.com/en/pdx-x201910-pn-N5172B. (2017).
[58]
From Text to Speech. 2017. Free online TTS service. http://www.fromtexttospeech.
com/. (2017).
[59]
Innoetics Text to Speech Technologies. 2017. Innoetics Text-to-Speech. https:
//www.innoetics.com/. (2017).
[60]
Timothy Trippel, Or Weisse, Wenyuan Xu, Peter Honeyman, and Kevin Fu. 2017.
WALNUT: Waging doubt on the integrity of mems accelerometers with acoustic
injection attacks. In Proceedings of the IEEE European Symposium on Security and
Privacy (EuroS&P). IEEE, 3–18.
[61]
Tavish Vaidya, Yuankai Zhang, Micah Sherr, and Clay Shields. 2015. Cocaine
Noodles: Exploiting the gap between human and machine speech recognition. In
Proceedings of the USENIX Workshop on Oensive Technologies (WOOT). USENIX
Association.
[62]
Olli Viikki and Kari Laurila. 1998. Cepstral domain segmental feature vector
normalization for noise robust speech recognition. Speech Communication 25, 1
(1998), 133–147.
[63] Vocalware. 2017. Vocalware TTS. https://www.vocalware.com/. (2017).
[64]
Xiaohui Wang, Yanjing Wu, and Wenyuan Xu. 2016. WindCompass: Determine
Wind Direction Using Smartphones. In Proceedings of the 13th Annual IEEE
International Conference on Sensing, Communication, and Networking (SECON).
IEEE, 1–9.
[65]
Xdadevelopers. 2017. HiVoice app, what is it for? https://forum.xda-developers.
com/honor-7/general/hivoice-app-t3322763. (2017).
[66]
Chen Yan, Wenyuan Xu, and Jianhao Liu. 2016. Can you trust autonomous
vehicles: Contactless attacks against sensors of self-driving vehicle. DEF CON
(2016).
Session A3: Adversarial Machine Learning
CCS’17, October 30-November 3, 2017, Dallas, TX, USA
117
