This paper is included in the Proceedings of the
16th USENIX Symposium on Operating Systems
Design and Implementation.
July 11–13, 2022 • Carlsbad, CA, USA
978-1-939133-28-1
Open access to the Proceedings of the
16th USENIX Symposium on Operating
Systems Design and Implementation
is sponsored by
Trinity: High-Performance Mobile Emulation
through Graphics Projection
Di Gao, Hao Lin, Zhenhua Li, Chengen Huang, and Yunhao Liu, Tsinghua University;
Feng Qian, University of Minnesota; Liangyi Gong, CNIC, CAS; Tianyin Xu, UIUC
htt ps://www.usenix.org/conference/osdi22/presentation/gao

Trinity: High-Performance Mobile Emulation through Graphics Projection
Di Gao
†∗
, Hao Lin
†∗
, Zhenhua Li
†
, Chengen Huang
†
, Yunhao Liu
†
Feng Qian
§
, Liangyi Gong
‡
, Tianyin Xu
¶
†
Tsinghua University
§
University of Minnesota
‡
CNIC, CAS
¶
UIUC
Abstract
Mobile emulation, which creates full-fledged software mo-
bile devices on a physical PC/server, is pivotal to the mo-
bile ecosystem, especially for PC-based mobile gaming, app
debugging, and malware detection. Unfortunately, existing
mobile emulators perform poorly on graphics-intensive apps
in terms of either efficiency or compatibility or both. To ad-
dress this, we introduce graphics projection, a novel graphics
virtualization mechanism that adds a small-size projection
space inside the guest memory of a virtual mobile device.
The projection space processes graphics operations involving
control contexts and resource handles without host interac-
tions. Novel flow control and data teleporting mechanisms are
devised to match the decoupled graphics processing rates of
the virtual device and the host GPU to maximize performance.
The resulting new Android emulator, dubbed Trinity, exhibits
an average of 93.3% native hardware performance and 97.2%
app support, in some cases outperforming other emulators
by more than an order of magnitude. It has been adopted by
Huawei DevEco Studio, a major Android IDE with millions
of developers.
1 Introduction
Mobile emulation has been a keystone of the mobile ecosys-
tem. Developers today typically debug their apps on generic
mobile emulators (e.g., Google’s Android Emulator, or GAE
for short) rather than on heterogeneous real devices. Also,
various dedicated mobile emulators (e.g., Bluestacks [
14]
and DAOW [
55]) are used to detect malware in app mar-
kets [
21, 44, 54], to enable mobile gaming on PCs [14, 55],
and to empower the emerging notion of cloud gaming [36].
1.1 Motivation
To create full-fledged software mobile devices on a physical
PC/server, mobile emulators usually adopt the classic virtu-
alization framework [33, 40,45, 46] where a mobile OS runs
in a virtual machine (VM), referred to as the guest, hosted
on a PC/server, referred to as the host. However, traditional
virtualization techniques are initially designed to work on
headless servers or common PCs without requiring strong
UI interactions within the VM, while real-world mobile apps
∗
Co-primary authors. Zhenhua Li is the corresponding author.
are highly interactive [37] and thus expecting mobile emu-
lators to have powerful graphics processing capabilities (as
provided by real mobile phones) [55]. This capability gap is
further aggravated by the substantial architectural differences
between the graphics stacks of desktop and mobile OSes [15].
Over the years, several approaches have been proposed to
fill the gap. Perhaps the most intuitive is solely relying on
a CPU to carry out a GPU’s functions. For example, as a
user-space library residing in mobile OSes (e.g., Android),
SwiftShader [26] helps a CPU mimic the processing routines
of a GPU. This achieves the best compatibility since any
mobile app can thus seamlessly run under a wide variety of
environments even without actual graphics hardware, but at
the cost of poor efficiency since a CPU is never suited to
handling the highly parallel (graphics) rendering tasks.
To improve the emulation efficiency, a natural approach is
multiplexing the host GPU within a PC/server through API
remoting [18, 50], which intercepts high-level graphics API
calls at the guest and then executes them on the host GPU with
dedicated RPC protocols and guest-host I/O pipes. Unfortu-
nately, the resulting products ( e.g., GAE) cannot smoothly
run many common apps, let alone “heavy” (i.e., graphics-
intensive) apps for AR/VR viewing and 3D gaming. This
shortcoming stems from frequent VM Exits to the host to
execute API calls, introducing a considerable “tromboning”
effect [19] on the control and data flows. This results in addi-
tional idle waiting at the guest, as it must wait not only for the
API call to complete, but also for the added process of exiting
to the host and returning back to the guest.
To mitigate the issue, device emulation [17] moves the vir-
tualization boundary from the API level to the driver level.
It forwards guest-side graphics driver commands to the host
with a shared memory region inside the guest kernel to realize
their effects with the host GPU. Compared to high-level APIs,
driver commands are much fewer, more capable, and mostly
asynchronous [17], so device emulation effectively reduces
guest-host control/data exchanges and idle waiting. However,
the translation from API calls to driver commands degrades
critical high-level abstractions such as windows and threads
to low-level memory addresses and register values. Due to
the loss of high-level information, driver commands must
be sequentially executed at the host, degrading guest-side
multi-threaded rendering to host-side single-threaded render-
ing. Hence, the resulting emulators (e.g., QEMU-KVM) can
smoothly run regular apps but not heavy ones.
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 285
Another approach is to break guest-host isolation by re-
moving the virtualization layer so apps can directly use the
GPU, as embodied in DAOW [
55]. This requires manually
translating Linux system calls used by Android to Windows
ones. Unfortunately, many apps cannot run on DAOW be-
cause many (
∼
46%) system calls are not translated due to the
huge engineering efforts required for full system calls’ trans-
lation. Also, the supported apps must run under the protection
of additional sophisticated security defenses to compensate
for the lack of guest-host isolation.
1.2 Contribution
We present Trinity, a novel mobile emulator that simultane-
ously achieves high efficiency and compatibility. Our guiding
principle is to decouple the guest-host control and data ex-
changes and make them as asynchronous as possible when
multiplexing the host GPU under the virtualization frame-
work, so that frequent VM Exits for synchronous host-side
execution of API calls can be largely reduced. For this pur-
pose, we propose to add a projection space inside the guest
memory, where we selectively maintain a “projected” subset
of control contexts (termed shadow contexts) and resource
handles. Such contexts and handles are derived but different
from the real ones required by a physical GPU to perform ren-
dering, so as to reflect and reproduce the effects of guest-side
graphics operations (i.e., API calls). Thus, the vast majority
(99.93%) of graphics API calls do not need synchronous exe-
cution at the host, while consuming less than 1 MB memory
for even a heavy 3D app.
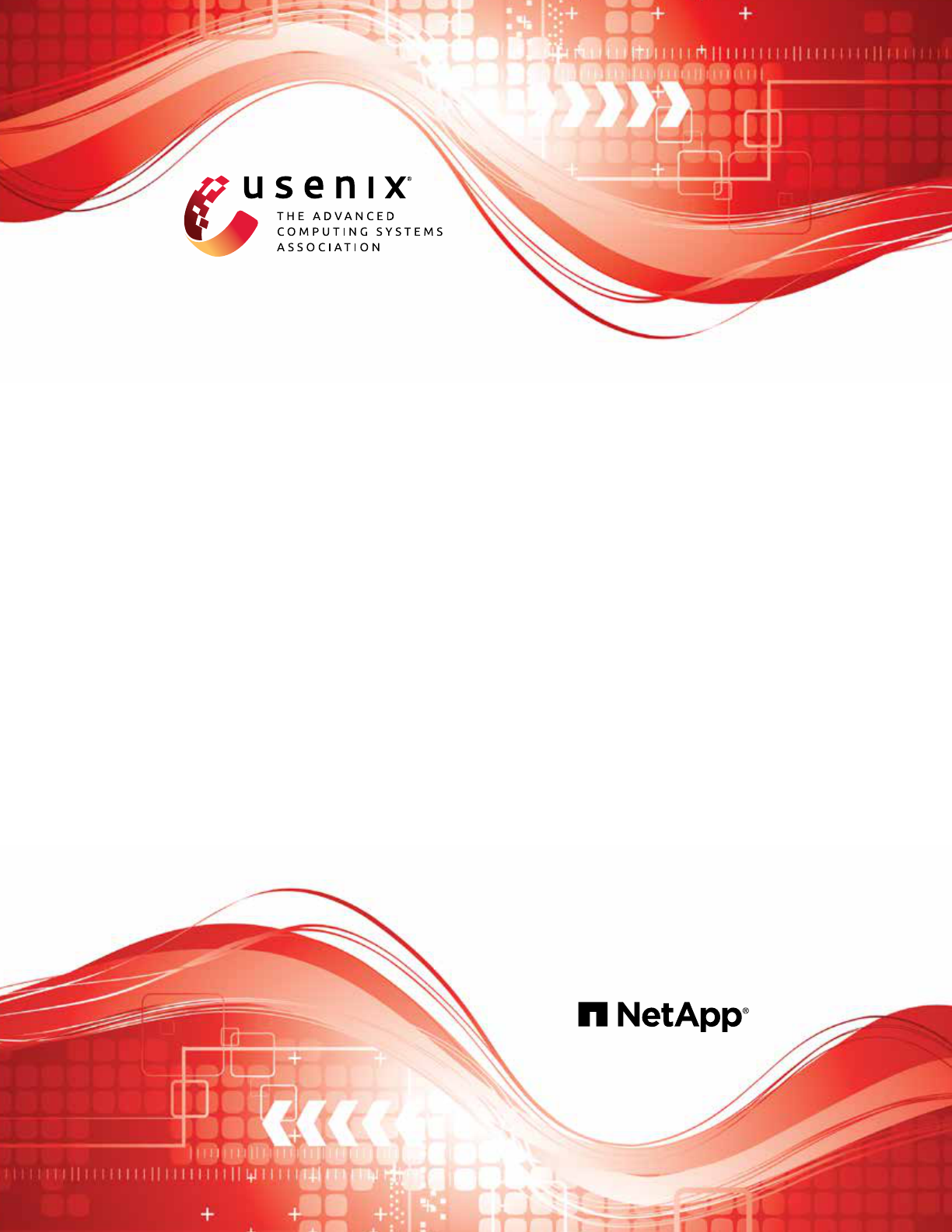
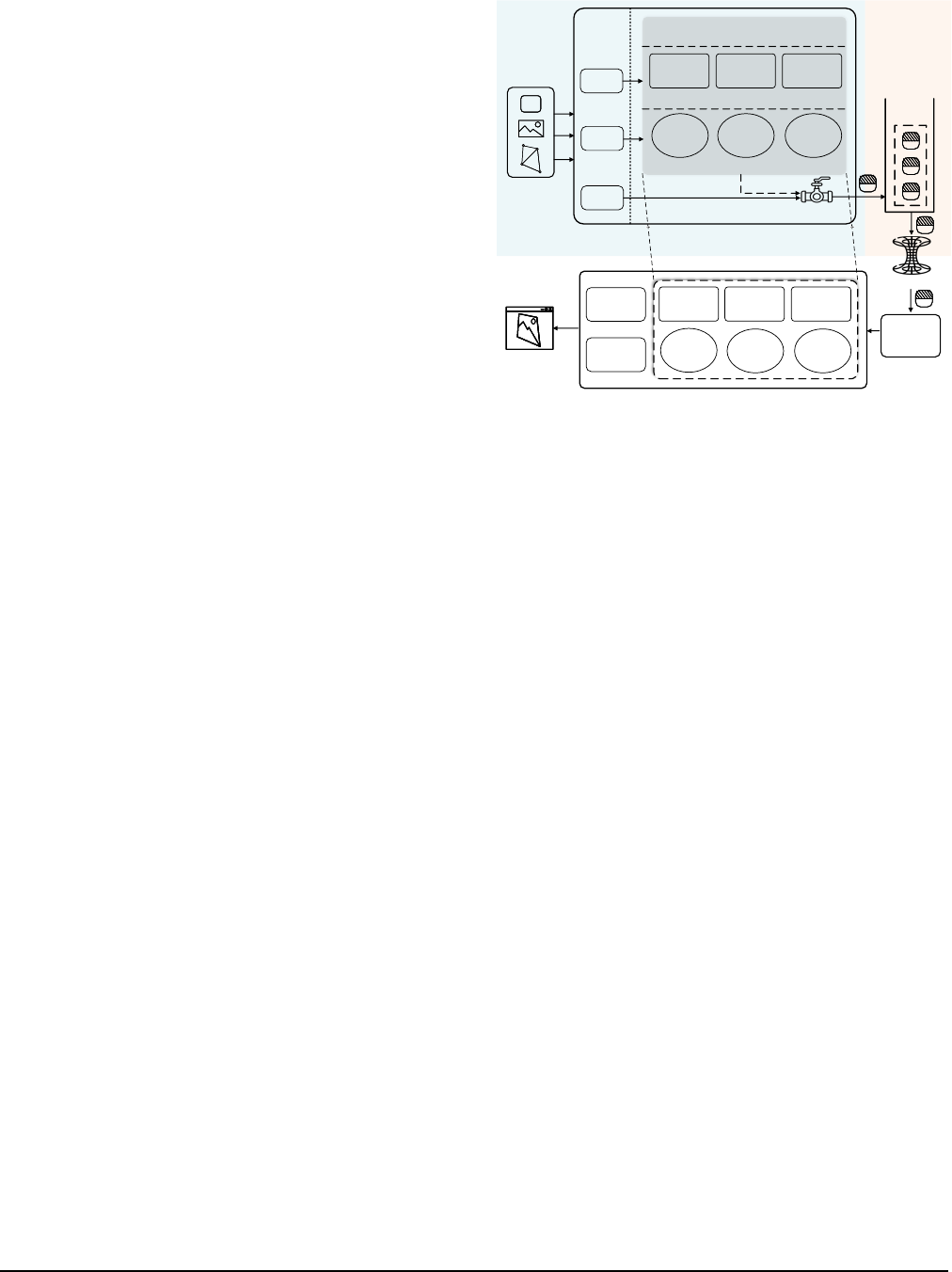
Concretely, when an Android app wants to draw a trian-
gle on a physical phone, it sequentially issues three types of
graphics API calls: context setting (Type-1), resource manage-
ment (Type-2), and drawing (Type-3). Type-1 prepare the can-
vas and bind resource handles; Type-2 populate the handles’
underlying resources with the triangle’s vertex coordinates,
filling colors/patterns, etc.; Type-3 instruct the GPU to render
and display the triangle. In contrast, as shown in Figure 1,
when the app runs in Trinity, Type-1 and Type-2 calls are first
executed only in the projection space, i.e., their effects are
temporarily reflected on the shadow contexts and resource
handles. Later upon drawing calls (Type-3), their effects are
delivered to the host to realize actual rendering.
Combined with graphics projection, an elastic flow control
algorithm is devised in Trinity to orchestrate the execution
speeds of control flows at both the guest and host sides. Re-
garding the guest-host data flows, we find that the major chal-
lenge of rapidly delivering them lies in the high dynamics
of system status and data volume (e.g., bursty data flows are
common in graphics operations). To this end, we find that the
dynamic situations in fact follow only a few patterns, each
of which requires specific data aggregation, persistence, and
arrival notification strategies. Therefore, we implement all
the required strategies, and utilize static timing analysis [12]
App
Projection Space
Shadow
Contexts
Resource
Handles
Host GPU
Contexts Resources
GPU
Rendering
Guest
Host
Virtualization Boundary
Type-1
Graphics
API Call
Type-2
Graphics
API Call
Type-3
Graphics
API Call
Type-1
Type-2
Figure 1: Basic workflow of Trinity.
to estimate which strategy is best suited to a data flow. With
these efforts, we achieve high emulation efficiency for Trinity.
Similar to GAE, Trinity is also implemented atop QEMU
(for general device extensibility) and hosts the Android OS,
with 118K lines of C/C++ code. We evaluate its performance
using standard graphics benchmarks, the top-100 3D apps
from Google Play, and 10K apps randomly selected from
Google Play. We also compare the results with six mainstream
emulators: GAE, QEMU-KVM, Windows Subsystem for An-
droid, VMware Workstation, Bluestacks, and DAOW. The
evaluation shows that Trinity can achieve 80%∼110% (aver-
aging at 93.3%) native hardware performance, outperforming
the other emulators by 1.4
×
to 20
×
. For compatibility, Trinity
can run the top-100 3D apps and 97.2% of the 10K randomly
selected apps. To our knowledge, Trinity is the first and the
only Android emulator that can smoothly run heavy 3D apps
without losing compatibility (or security).
Software/Code/Data Availability.
Trinity has recently been
adopted by Huawei DevEco Studio [28], a major Android
IDE (integrated development environment) with millions of
developers. Currently, it is going through the beta test run for
minor functional adjustments and bug fixes. The binary, code,
and measurement data involved in this work are released at
https://TrinityEmulator.github.io/.
2 Understanding Mobile Graphics APIs
We first delve into the three types of APIs in OpenGL ES, the
de facto graphics framework of Android (§
2.1), and then mea-
sure real-world 3D apps to obtain an in-depth understanding
of their graphics workloads (§
2.2).
2.1 Background
Figure 2 shows a basic OpenGL ES program for drawing a
triangle. The program creates a graphics buffer in a GPU’s
graphics memory using a Type-2 API—
glGenBuffers
, pop-
ulates the buffer with the coordinate data of the triangle’s
286 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association
float vertices[9] = { 0.0f, 0.5f, 0.0f, // First vertex
-0.5f, -0.5f, 0.0f, // Second vertex
0.5f, -0.5f, 0.0f // Third vertex
}; // Triangle vertices’ (x, y, z) coordinates
float *vtx_mapped_buf; // Address of the mapped buffer
void populate_buffer() {
glBufferData(GL_ARRAY_BUFFER, sizeof(vertices),
0, GL_DYNAMIC_DRAW);
...
// Type-2: query the buffer size
int buf_size;
glGetBufferParameteriv(GL_ARRAY_BUFFER,
GL_BUFFER_SIZE, &buf_size);
// Type-2: map the buffer to main memory space
vtx_mapped_buf = glMapBufferRange(GL_ARRAY_BUFFER,
0, buf_size, GL_MAP_WRITE_BIT);
memcpy(vtx_mapped_buf, vertices, buf_size);
// Type-2: unmap the buffer
glUnmapBuffer(GL_ARRAY_BUFFER);
}
(a) Populate the bound graphics buffer by latent mapping.
uint vertex_buffer_handle; // Graphics buffer handle
void draw() {
...
// Type-2: allocate a buffer and generate its handle
glGenBuffers(1, &vertex_buffer_handle);
// Type-1: bind the buffer to context
glBindBuffer(GL_ARRAY_BUFFER, vertex_buffer_handle);
populate_buffer();
...
// Type-3: draw the triangle
glDrawArrays(GL_TRIANGLES, 0, 3);
...
}
1. The buffer’s handle is bound to the context
2. All subsequent
operations do not
need to specify the
handle again
(b) Draw the triangle.
Figure 2: OpenGL ES code snippet for drawing a triangle.
vertices through a Type-1 API—
glBindBuffer
and a Type-
2 API—
glMapBufferRange
, and then instructs the GPU to
draw the triangle using a Type-3 API—glDrawArrays.
Type-1: Context Setting.
To manipulate or use the allocated
graphics buffer, instead of passing the buffer’s handle to every
API call, the program first calls
glBindBuffer
, which binds
the handle to a thread-local context, i.e., the transparent, global
state of the thread. Then, all the subsequent buffer-related API
calls (e.g., the buffer population call
glBufferData
and the
drawing call
glDrawArrays
that uses the buffer data to draw)
will be directly applied to the bound buffer, without needing
to specify the buffer handle in their call parameters.
The above process is called context setting, which config-
ures critical information of the current thread’s context. This
programming paradigm avoids repeatedly transferring context
information from the main memory to the GPU, particularly
when the information is rarely modified. In general, the con-
text information that requires setup includes the current oper-
ation target, render configurations, and resource attributes.
The operation target identifies the object that subsequent API
calls will affect, e.g., in Figure 2 the buffer handle becomes
the operation target of subsequent API calls after it is bound
to the context. Render configurations define certain rendering
behaviors, e.g., whether to perform validation of pixel values
after a frame is rendered. Resource attributes correspond to
resources’ internal information, e.g., formats of images and
data alignment specifications.
Type-2: Resource Management.
Resources involved in
graphics rendering include graphics buffers that store ver-
tice and texture data (“what to draw”), shader programs that
produce special graphics effects such as geometrical transfor-
mation (“how to draw”), and sync objects that set time-wise
sync points (“when to draw”). Graphics buffers hold most of
the graphics data and thus require careful management. To
populate a buffer with graphics data, there are mainly two
approaches—immediate copy and latent mapping.
With regard to immediate copy, data are passed into the
glBufferData
API’s third call parameter and copied from
the main memory to the bound graphics buffer, i.e., the buffer
underlying
vertex_buffer_handle
. This approach is easy
to implement but involves synchronous, time-consuming
memory copies. In contrast, Figure
2 shows the latent map-
ping approach, where
glBufferData
is called but no data are
passed to it;
glMapBufferRange
instead maps the graphics
buffer to a main memory address, i.e.,
vtx_mapped_buf
. The
data can then be directly stored in the mapped main memory
space, without needing to synchronously trigger memory-to-
GPU copies. The data are latently copied to the graphics
buffer by the GPU’s hardware copy engine (a DMA device)
usually when
glUnmapBuffer
is called to release the address
mapping, thus being more flexible and efficient.
Type-3: Drawing.
After the contexts and resources are pre-
pared, the drawing phase is usually realized with just a few
API calls, e.g.,
glDrawArrays
as shown in Figure 2. Such
APIs are all designed to be asynchronous in the first place, so
that the graphics processing throughput of a hardware GPU
can be maximized. When a drawing call is issued, the call is
simply pushed into the GPU’s command queue rather than
being executed synchronously.
Apart from the above operations for rendering a single
frame, graphics apps often need to render continuous frames
(i.e., animations) in practice. To this end, a modern graphics
app usually follows the delta timing principle [16] of graphics
programming, where the app measures the rendering time of
the current frame (referred to as the frame’s delta time) to
decide which scene should be rendered next. For example,
when a game app renders the movement of a game character,
the app would measure the delta time of the current frame to
compute how far the character should move (i.e., the charac-
ter’s coordinate change) in the next frame based on the delta
time and the character’s moving speed.
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 287
0 5K 10K 15K 20K 25K
Number of API Calls
0.2
0.4
0.6
0.8
1.0
CDF
Mean=2,188
Median=1,587
Min=39
Max=27,609
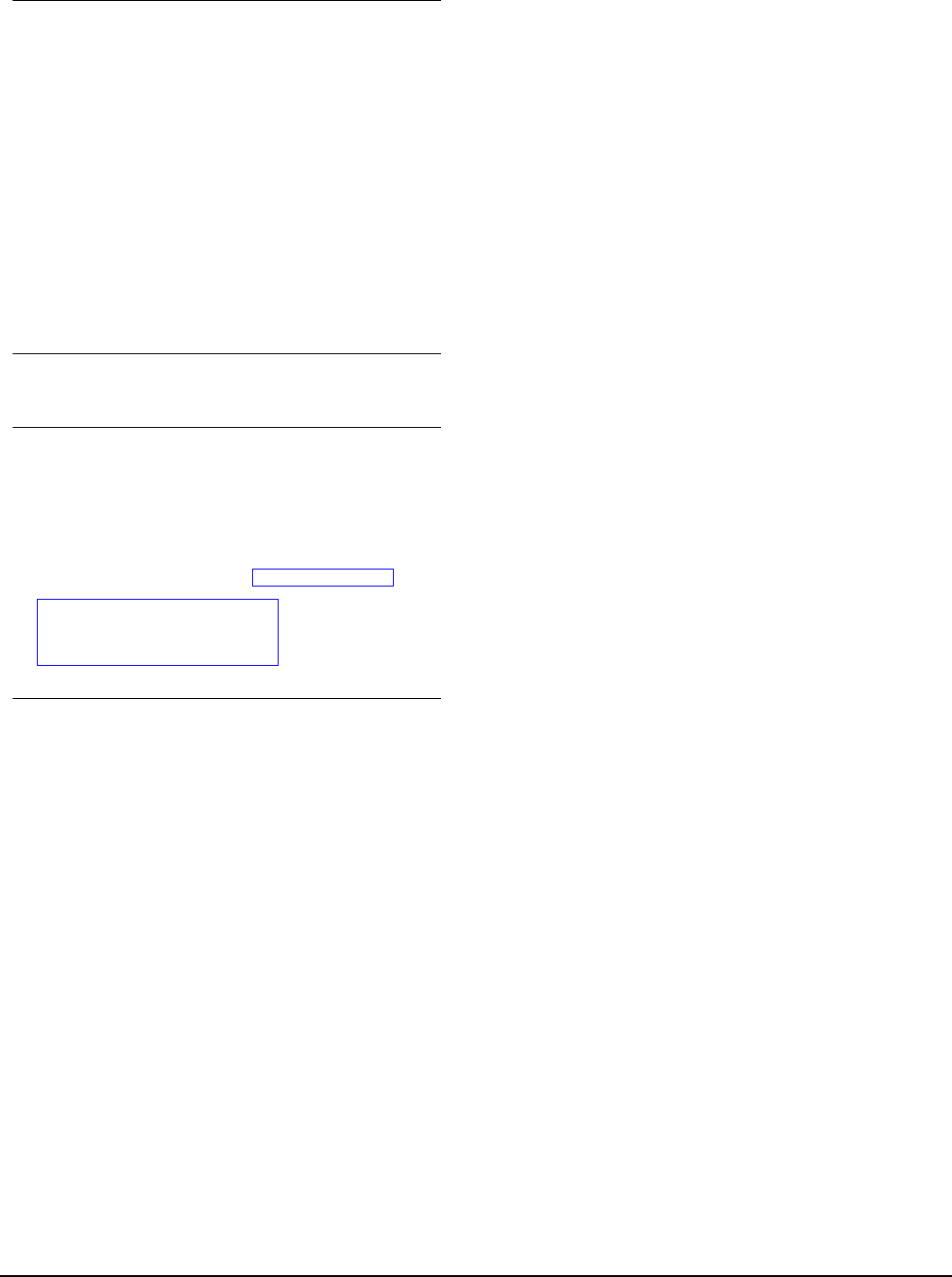
Figure 3: Number of API calls issued
for rendering a single frame.
0 20 40 60 80 100
Percentage (%)
0.2
0.4
0.6
0.8
1.0
CDF
Mean=49.10
Median=49.91
Min=3.18
Max=95.36
Mean=44.09
Median=44.32
Min=1.39
Max=96.80
Mean=6.81
Median=5.78
Min=0.00
Max=40.77
Type-1 Type-2 Type-3
Figure 4: Percentages of specific types
of API calls for the top-100 3D apps.
0 25 50 75 100 125 150 175
Size (MB)
0.2
0.4
0.6
0.8
1.0
CDF
Mean=22.15
Median=0.99
Min=0.03
Max=1,090.49
Figure 5: Graphics data amount gener-
ated per second by top-100 3D apps.
Graphics APIs beyond OpenGL.
While the above descrip-
tions focus on OpenGL (ES), we find that the API seman-
tics of other existing graphics frameworks (such as Vulkan)
have similar characteristics. Their APIs can also be cate-
gorized into the aforementioned three types. For example,
in Vulkan
VKInstance
is used for managing context infor-
mation,
vkCreateBuffer
is called for allocating buffer re-
sources, and vkCmdDraw issues drawing commands.
This is not surprising, but stems from a common GPU’s in-
ternal design. Like a CPU, a GPU usually leverages dedicated
state registers for determining the current operation targets
and parameters (i.e., contexts), based on which an array of
computation cores perform rendering and computing tasks in
parallel. Special high-bandwidth graphics memory is often
embedded in a GPU for holding a large amount of graphics
resources (e.g., vertex and texture), therefore mitigating the
memory wall issue observed in a CPU [53], i.e., the speed
disparity between memory accesses and computations. Cor-
respondingly, the three types of graphics API calls are then
used for manipulating these essential hardware components
throughout a rendering thread’s lifecycle.
2.2 Real-World Graphics Workloads
To obtain a deeper understanding of modern graphics work-
loads in terms of both control flow and data flow, we measure
the top-100 3D apps (which are all game apps) from Google
Play as of 11/20/2021 [51] by examining the distributions of
their API calls and the sizes of their generated graphics data.
We instrument vanilla Android 11’s system graphics library
to log the API calls and count the graphics data of a test app
during its run time. For each game app, we play a full game
set (whose specific operations depend on the app’s content) to
record the runtime API invocation data. The experiments are
conducted on a (middle-end) Google Pixel 5a device, which
is equipped with a Qualcomm Snapdragon 765G SoC, 6 GB
memory, 128 GB storage, and 1080p display.
Figure 3 shows that an average of 2,187 API calls are issued
for rendering a single frame. For most (88%) of the frames,
the number of API calls is larger than 1,000. Figure 4 depicts
the percentages of specific types of API calls. As shown,
the distribution is quite skewed—Type-1 and Type-2 occupy
the vast majority (around 94% on average), while Type-3
take up merely 6% on average. Additionally, we find that
despite being the majority, most Type-1 and Type-2 calls do
not have immediate effects on the final rendering results until
Type-3 calls are issued. For example, graphics data stored
in a graphics buffer are usually not used by the GPU before
certain drawing calls are issued.
With respect to data flow, there also exists considerable
disparity in the graphics data amount generated per second,
as indicated in Figure
5. While 90% of the graphics data
generated per second are less than 60 MB in size, the peak data
rate can be as high as 1.06 GB/second, revealing significant
data rate dynamics in real-world graphics workloads.
2.3 Implications for Mobile Emulation
Type-1 and Type-2 calls are relatively cheap when executed
natively, but this may not be the case in a virtualized environ-
ment. If a Type-1 or Type-2 call is synchronously executed on
the host GPU, it can be expensive to first exit the guest, then
wait for the host to execute the call, and then return back to
the guest. This “tromboning” process adds substantial latency
to what might otherwise be an inexpensive call, especially
when Type-1 and Type-2 calls are very frequent.
To mitigate the problem, an intuitive approach is using a
buffer to batch void API calls, i.e., calls that do not return any
values, so that not only the void Type-1 and Type-2 calls are
delayed, but the asynchronous nature of Type-3 calls (which
are all void calls) can also be exploited. However, the resulting
efficiency improvement is limited by the proportion of void
API calls, i.e., only 41.4% according to our measurement.
Thus, it is no wonder that GAE, which takes this approach to
improve efficiency, cannot smoothly run many common apps.
In hopes of fundamentally addressing the problem, we
make the following key observation—resource-related opera-
tions (involving all Type-2 and most Type-1 operations) are
fully handle-based. That is to say, these operations only in-
teract with indirect, lightweight resource handles in the main
288 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association
memory, rather than the actual resources lying in the GPU’s
graphics memory. As demonstrated in Figure 2, a resource
handle is merely an unsigned integer. In hardware GPU envi-
ronments, this greatly facilitates the manipulation of graphics
resources (without actually holding them in the main mem-
ory), thus avoiding frequently exchanging a large volume of
graphics data between the main memory and the graphics
memory. Note that the two memories are isolated hardware
components connected via a relatively slow PCI bus.
We can exploit this key insight to accelerate mobile emula-
tion, given that guest and host are also isolated by virtualiza-
tion. We “project” a selective subset of contexts and resource
handles, which are necessary for realizing actual rendering at
the host GPU, onto the address spaces of guest processes; the
resulting contexts after projection are termed shadow contexts.
With the help of shadow contexts and resource handles, most
(void and non-void) APIs can be asynchronously executed
at the host. Moreover, certain Type-1 and Type-2 API calls
(mostly used for querying context and resource information)
can be directly accomplished within the projection space,
completely eliminating their execution at the host.
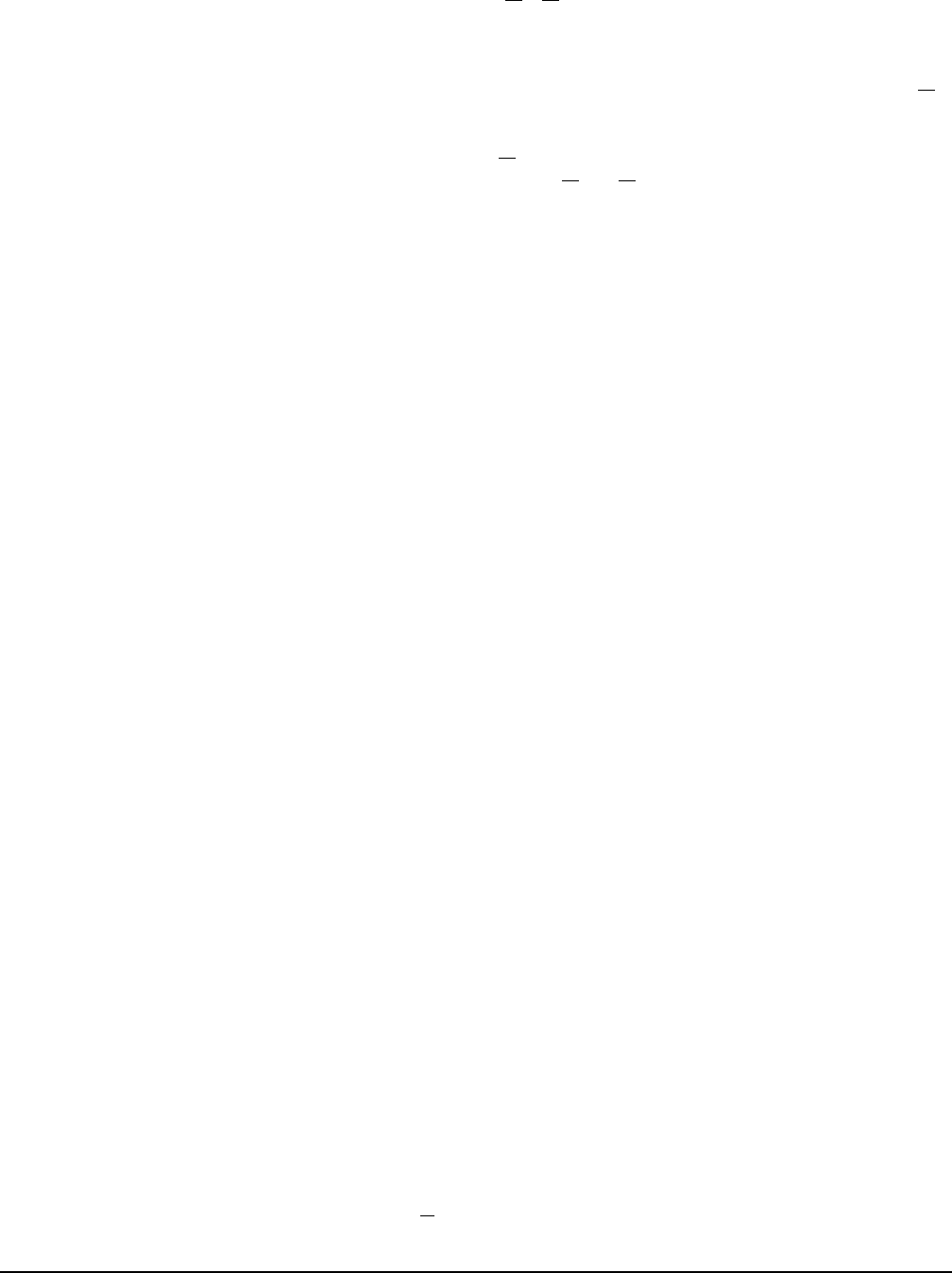
3 System Overview
Figure 6 depicts Trinity’s system architecture. It uses virtu-
alization to isolate guest and host execution environments
to retain strong compatibility and security. At the heart of
Trinity lies a small-size graphics projection space, which is
allocated inside the memory of a guest app/system process.
Within the space, we maintain a special set of shadow contexts
and resource handles which correspond to a subset of control
contexts and resources inside a hardware GPU (cf. §4).
Once Type-1 or Type-2 API calls issued from a guest pro-
cess are executed in the projection space, the shadow contexts
and resource handles will reflect and preserve their effects.
Control flow then returns to the guest process for executing its
next program logic without synchronously waiting for host-
side execution of the API calls (as conducted by API remot-
ing). Meanwhile, the host contexts are asynchronously aligned
with the shadow contexts; mappings are asynchronously es-
tablished between resource handles and host resources.
Since synchronous host-side API execution is avoided,
rather than exiting to the host to deliver data, the host can
choose to asynchronously fetch the guest data required for
API execution from the guest memory space through polling
(cf. §6.1), thus reducing frequent VM Exits. Later when the
guest process issues Type-3 API calls, they are also asyn-
chronously executed at the host as they are designed to be
asynchronous. In this manner, the originally time-consuming
guest-host interactions can be effectively decomposed into
interleaved and mostly asynchronous guest-projection inter-
actions and projection-host interactions.
For example, when running the program in Figure 2, Trinity
directly generates a buffer handle upon the Type-2 API call
Host
01011
11010
01011
11010
APP
Operation
Target
Resource
Attributes
Render
Configs
Buffer
Handle
Shader
Handle
Sync
Handle
Projection Space
Shadow Contexts
Resource Handles
Type-1
Type-2
Type-3
Graphics
API
Customized Graphics Library
Guest
Kernel
...
Guest
Userland
Data
Queue
Flow Control
Rendered
Pixels
Hardware GPU
Execution
Status
Trinity
Window
Operation
Target
Resource
Attributes
Render
Configs
Teleporting
Render
Engine
Graphics
Buffer
Shader
Program
Sync
Object
Figure 6: Architectural overview of Trinity.
glGenBuffers
, which is then sent to the host. When the pro-
gram finishes sending the handle, its control flow continues;
meanwhile, the host asynchronously allocates a buffer and
its handle by also calling
glGenBuffers
in a dedicated host
rendering thread using the host-side desktop OpenGL library,
whose APIs are a superset of OpenGL ES APIs.
The relation between the host handle and the guest one is
recorded in a hash table at the host. When
glBindBuffer
(Type-1) is called with the guest handle, Trinity adjusts the
shadow context information of the currently bound buffer han-
dle, and then sends the bound guest handle to the host. When
the guest finishes sending the handle, the host asynchronously
looks up the corresponding host handle in the hash table, and
then calls
glBindBuffer
at the host to bind the host buffer
(handle) in the rendering thread.
When
glMapBufferRange
(Type-2) is called, Trinity al-
locates a guest memory space and returns it to the guest
program. When
glUnmapBuffer
(Type-2) is called, Trinity
transfers the data in the guest memory space to the host, as
no further modifications can be made to the data then. At the
host side, the real buffer is then asynchronously populated
with the data also through
glMapBufferRange
. Finally, upon
glDrawArrays
(Type-3), Trinity asynchronously executes it
at the host rendering thread, so as to instruct the host GPU to
realize actual rendering with the graphics buffer’s data.
To sum up, Trinity’s projection space provides two key
advantages. First, it helps to avoid synchronous host-side
execution of APIs (as in API remoting), even for non-void
calls (such as
glGenBuffers
) that need to be processed im-
mediately, so that expensive VM Exits can also be reduced.
Second, it can resolve the API calls for querying context and
resource information, such as
glGetBufferParameteriv
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 289

in Figure 2, without sending them to the host. Quantitatively,
99.93% calls do not need synchronous host-side API exe-
cution, among which 26% are directly resolved at the guest
(cf. §8.3). Although the projection space can involve pro-
cessing certain calls twice—once at the guest and once at
the host, this is done with relatively cheap operations whose
extra costs are more than outweighed by the savings from
reduced synchronous host-side execution of the APIs and the
accompanied VM Exits.
To maximize Trinity’s graphics processing throughput, all
the above guest-side and host-side operations are coordinated
by an elastic flow control algorithm (§5). Furthermore, the
projection-host interactions are accomplished via a data tele-
porting method (§6) that attempts to maximize the data deliv-
ery throughput under high data and system dynamics.
4 Graphics Projection
We present the construction and maintenance of shadow con-
texts (§4.1) and resource handles (§4.2), i.e., the key data
structures that format the projection space.
4.1 Shadow Context
In §2.1, we have introduced that Type-1 APIs are usually used
to manipulate three types of context information: 1) operation
target, 2) render configurations, and 3) resource attributes.
Apart from the above, as shown in Figure
6, context infor-
mation in a real GPU environment also includes 4) rendered
pixels and 5) execution status. Here rendered pixels refer to
the rendered pixels stored in graphics memory, and execution
status is the current status of the GPU’s command queues.
For a shadow context, we carefully select to maintain
the following three types of context information: 1) oper-
ation target, 2) render configurations, and 3) resource at-
tributes. Consequently, with the above information, subse-
quent reads of context information can be directly fulfilled
with the shadow contexts without resorting to the host. The
shadow context is maintained based on Type-1 calls issued
by a guest process. For example, when the process calls
glBindBuffer
(as shown in Figure 2) to bind a buffer han-
dle (
vertex_buffer_handle
) as the current operation tar-
get, the operation target maintained in the shadow context
(usually an integer) will be modified to the buffer handle.
The other two pieces of context information we choose
not to maintain, i.e., rendered pixels and execution status, are
related to a hardware GPU’s internal states. Managing such
information requires frequent interactions with the host GPU,
thus incurring prohibitively high overhead. If such informa-
tion is actually required, it will be retrieved from the host
synchronously. Fortunately, such cases occur with a pretty
low (0.07% on average) probability during an app’s rendering
(according to our measurement in §2.2). Even when such
cases occur, we make considerable efforts to minimize the
incurred time overhead by carefully designing the data tele-
porting method, which will be detailed in §6.
Similar to a CPU context, a rendering context is tightly
coupled with the thread model of an OS. At any given point
of time, a thread is bound to a single rendering context, while
a rendering context can be shared among multiple rendering
threads of a process to realize cooperative rendering. Thus,
in the graphics projection space of a process, we maintained
shadow contexts on a per-thread basis, while keeping a refer-
ence to the possible shared contexts.
4.2 Resource Handle
As introduced in §2.1, resources involved in graphics ren-
dering include graphics buffers, shader programs and sync
objects. Compared to contexts, the allocation of resource
handles and management of actual resources often require
more judicious data structure and algorithm design, as well
as guest-host cooperation, since they can easily induce in-
efficient memory usage and implicit synchronization, thus
impairing system performance.
Handle Allocation.
As mentioned before, all the graphics
resources are managed through resource handles by modern
GPUs. Guided by this, when a guest process requests for a
resource allocation, we directly return a handle generated by
us, which is not backed with a real host GPU resource upon
handle generation. Then, after the control flow is returned
to the guest process, the host will perform actual resource
allocation in a transparent and asynchronous manner, and
record the mapping between the guest handle and the host
one in a host-side hash table. To make the guest-side handle
allocation efficient, we adopt a bitmap for managing each
type of resource handle, with which all the resource creation
and deletion can be done in
O(1)
time complexity, and we
can maintain good memory density through handle recycling.
Resource Management.
After allocating resource handles
for a guest process, we also need to properly manage the ac-
tual resources underlying the allocated handles. In particular,
the management of buffer resources is critical to system per-
formance as they hold most of the graphics data. As discussed
in §2.1, there are two approaches to populating a graphics
buffer with data, i.e., immediate copy and latent mapping.
For the former, developers would call
glBufferData
and
pass the data’s memory address to the API to initiate copying
the data from the main memory to the graphics buffer. In
this case, we need to immediately transfer the data (upon the
API call) to the host as required by the API. For the latter,
as discussed in §
3, the data transfer is conducted when the
guest memory space is unmapped (i.e.,
glUnmapBuffer
is
called) by the guest process. When the data are transferred
to the host, we need to populate the actual host-side graphics
buffer with the data. To this end, we first ensure that the host
context is aligned with the shadow context so that the correct
290 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association
buffer is bound and populated. Then, to efficiently populate
the buffer, we copy the data to a graphics memory pool we
maintain at the host, which maps a pre-allocated graphics
memory space to a host main memory address also using
latent mapping. In this way, modern GPUs’ DMA copy engine
can still be fully utilized to conduct asynchronous graphics
buffer population without incurring implicit synchronization
(cf. §2.1). After this, the allocated guest memory space will
be released, avoiding redundant memory usages.
5 Flow Control
With the guest and host control flows becoming mostly de-
coupled with the help of the projection space, their execution
speeds also become highly uncoordinated. This is because
a guest process’ operations at the projection space usually
only involve lightweight adjustments to the shadow contexts
and resource handles, thus being much faster than host-side
operations (i.e., actual rendering using the hardware GPU).
At first glance, this should not raise any problems since
guest API calls that require (synchronous or asynchronous)
host-side executions can simply queue up at a guest block-
ing queue—if the queue is filled up, the guest process would
block until the host render engine finishes prior operations.
However, we find that in practice this could easily lead to
control flow oscillation. From the guest process’ perspective,
a large amount of API calls are first quickly handled by the
projection space when the data queue is not full. Soon, when
the queue is filled up, a subsequent call would suddenly take
a significantly longer time to complete as the queue is waiting
for the (slower) host-side actual rendering. The long process-
ing time further leads to a long delta time of the current frame
as discussed in §
2.1. As a result, the guest process may gener-
ate abnormal animations following the delta timing principle,
e.g., a game character could move an abnormally long dis-
tance in just one frame due to the long delta time, leading to
poor user-perceived smoothness.
To resolve this problem, instead of solely relying on a
blocking queue, we orchestrate the execution speeds of con-
trol flows at both the guest and host sides. Our objective is
the fast reconciliation of the guest-side and host-side con-
trol flows, so that the overall performance of Trinity can be
staying at a high level. To this end, we design an elastic flow
control algorithm based on the classic MIMD (multiplicative-
increase/multiplicative-decrease) algorithm [31] in the com-
puter networking area, which promises fast reconciliation of
two network flows. To adapt MIMD to our graphics rendering
scenario, we regulate control flows’ execution speeds at the
fine granularity of each rendered frame.
In detail, when a guest rendering thread finishes all the
graphics operations related to a frame’s rendering, we let
it sleep for
T
s
milliseconds and wait for the host GPU to
finish the actual rendering.
T
s
is then calculated as
T
s
=
N
′
N
×
(
T
h
− T
g
)
, where
N
′
is the current difference in the number
of rendered frames between the guest’s and host’s rendering
threads,
N
is the desirable maximum difference set by us (
N
is
currently set to 3 in Trinity as we use the widely-adopted triple
buffering mechanism for smooth rendering at the host),
T
h
is
the host’s average frame time (for executing all the graphics
operations related to a frame) for the nearest
N
frames, and
T
g
is the guest’s average frame time also for the nearest
N
frames.
T
h
and
T
g
are calculated by counting each frame’s
rendering time at the host and the guest sides.
Specifically, if
N
′
> N
(i.e., the guest is too fast),
T
s
will
be multiplicatively increased to a longer time to approximate
the host’s rendering speed. Otherwise,
T
s
will be multiplica-
tively decreased, striving to maintain the current frame num-
ber difference at the desirable value. Typically,
T
s
lies between
several milliseconds and tens of milliseconds depending on
the guest-host rendering speed gap. In this way, Trinity can
quickly reconcile the guest-side and host-side control flows.
6 Data Teleporting
Fast guest-host data delivery is critical for keeping projection-
host interactions efficient. To realize this, we first analyze
system and data dynamics (§6.1) that constitute a major ob-
stacle to the goal, and then describe the workflow of our data
teleporting method (§6.2), which leverages static timing anal-
ysis to accommodate the dynamic situations.
6.1 System and Data Dynamics
When control flows are synchronously accompanied by data
flows, the guest-host data delivery mechanism can be very
simple. For example, in API remoting, VM Exits/Enters are
leveraged to achieve control handover and data exchange at
the same time. In Trinity, however, data flows are decoupled
from control flows (thanks to the graphics projection space),
so we are confronted with complicated situations as well
as design choices. Among these data flows, projection-host
data exchanges are the most likely to become a performance
bottleneck due to their crossing the virtualization boundary.
By carefully analyzing the projection-host data exchanges
when running top-100 3D apps, we find that the major chal-
lenge of rapidly delivering them lies in the high dynamics of
system status and data volume (abbreviated as system dynam-
ics and data dynamics respectively). With regard to system
dynamics, the major impact factors are the available memory
bandwidth and current CPU utilizations, which are not hard to
understand. As to data dynamics, call data of APIs that require
synchronous host execution are sensitive to end-to-end latency
(i.e., the delay until host-side executions of the calls), while
asynchronous ones require high processing throughput. Fur-
ther, we pay special attention to distinct data sizes and bursty
data exchanges (i.e., bulk data exchange during a short period
of time) which are common in modern graphics workloads as
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 291
Guest Userland
Data
APP
Guest Virtual Memory
. . .
. . .
. . .
Aggregate?
Y
Aggregation Buffer
N,
Write
Guest Kernel Driver
Guest Physical Memory
. . .
Persistent Space
Y
N,
Add to Ring
Host
Ring
Buffer
Data
Fetcher
Notify
Poll
Exit?
Y,
VM Exit
Done!
Persistent?
Add to Ring
Render
Engine
. . .
. . .
N
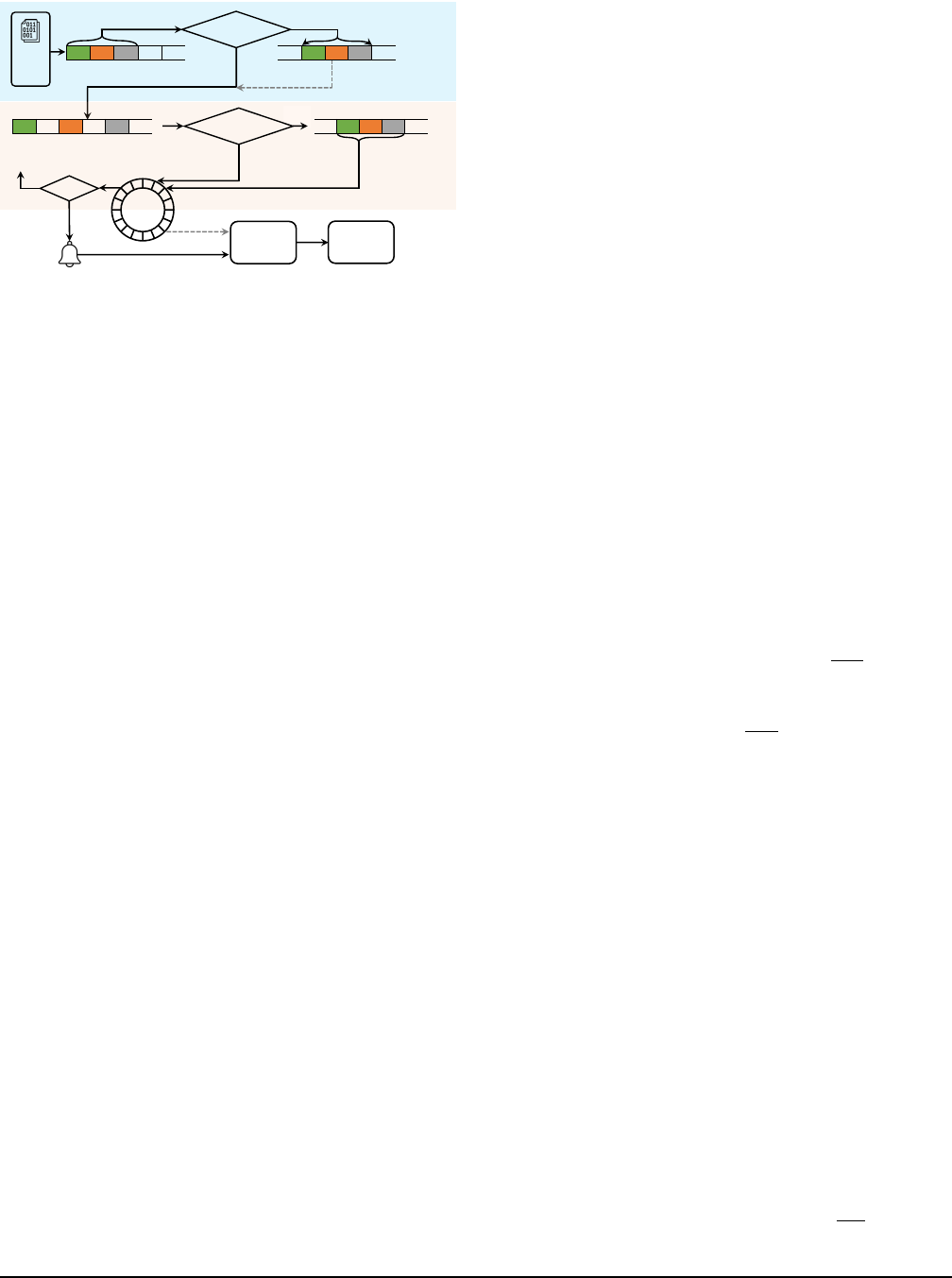
Figure 7: Workflow of data teleporting.
shown in Figure 5. In general, we can classify the dynamic
situations into
∼
16 patterns, roughly corresponding to the
combinations of 1) high/low CPU utilization, 2) high/low
available memory bandwidth, 3) synchronous/asynchronous
API call data, and 4) large/small data sizes.
To accommodate the dynamic situations, our key observa-
tion is that the guest-host data delivery process can be decom-
posed into three stages, i.e., data aggregation, data persistence
and arrival notification, as the data travel through the guest
user space, the guest kernel space and the host. Moreover, in
each of the stages, we find that there are mainly two different
data delivery strategies, which make opposing tradeoffs under
different dynamic situations as discussed below.
•
Data Aggregation. As exercised in GAE, aggregating non-
void API calls with a user-space buffer can usually reduce
the frequency of user/kernel switches. This is also the case
for Trinity since host-side execution of API calls is mostly
asynchronous. However, if the data to be transferred are
particularly large (e.g., in bursty data exchanges), mem-
ory copies during data aggregation could bring larger time
overhead compared to user/kernel switches; hence, the data
should be delivered to the kernel as early as possible with-
out any aggregation.
•
Data Persistence. For the data of a guest rendering thread,
we need to ensure their persistence until they are fetched
by the host. To this end, a simple strategy is blocking the
thread’s control flow until the data delivery is done (as
adopted by GAE). In Trinity, we realize that there is an
alternative strategy by using a special persistent space (e.g.,
in the guest kernel) to maintain the guest thread’s data,
so that there is no need to block the thread’s control flow.
Intuitively, this strategy is most suited to small data delivery,
which does not incur long-time memory copies.
•
Arrival Notification. To notify the host to fetch the data that
have arrived, we can simply leverage the VM Exit-based
strategy (adopted by GAE), whose incurred delays can be as
low as tens of microseconds. This, however, can lead to the
guest core’s being completely stopped. Alternatively, for
asynchronous data fetching, we can utilize a data polling-
based strategy at the host, which does not incur the guest
world’s stopping but would introduce millisecond-level
delay due to the thread sleeping and CPU scheduling delays
of a common time-sharing host OS.
6.2 Workflow
Given that there is no single strategy that can accommodate
every dynamic situation, we implement in Trinity all the com-
binations of strategies. Almost all of them are implemented at
the guest side, except that data polling is realized by the host.
To decide the proper strategy during each stage of data de-
livery, we adopt the static timing analysis [12] method, which
calculates the expected delay of each timing step (i.e., stage)
incurred by different data delivery strategies. As mentioned
before, the stages include data aggregation, data persistence,
and arrival notification. Suppose a guest app wishes to deliver
a data chunk of size
S
data
, the current copy speed of the guest
memory is
V
guest
, the current copy speed of the host memory
is
V
host
. Below we elaborate on the workflow of data teleport-
ing which selects the suitable strategy in each data delivery
stage based on static timing analysis.
Data Aggregation.
As shown in Figure 7, if the data to be
delivered are asynchronous API call data (i.e., call data of
APIs that do not need synchronous host-side execution), we
can aggregate them in a user-space buffer to reduce projection-
host interactions. However, aggregating the data in the buffer
incurs a memory copy, resulting in a delay of
S
data
V
guest
. Otherwise,
an individual
write
system call will be invoked to write the
data to our kernel character device driver (cf. §7), whose time
overhead is
T
write
. Obviously, if
S
data
V
guest
< T
write
, we choose to
aggregate the data; else, we choose not to.
In contrast, for synchronous API call data we should always
avoid data aggregation since synchronous calls should be
immediately delivered to the host for executions. Then, along
with these non-aggregation data, the aggregation buffer will
also be written to our kernel driver and then cleared. We next
enter the data persistence stage.
Data Persistence.
In this stage, our kernel driver will decide
whether to block the guest app’s control flow, or utilize an ad-
ditional persistent space for ensuring the persistence of a guest
thread’s data until the data are fetched by the host. Unlike the
user-space data aggregation buffer that serves to reduce the
frequency of entering the kernel and interacting with the host,
the kernel persistent space allows the app’s control flow to
quickly return to the user space for executing its next logic.
In practice, if we resort to the control flow blocking strategy,
the blocking time will consist of four parts: 1) the delay of
adding the data to a ring buffer shared by the guest and the
host for realizing data delivery—
T
ring
, 2) the delay of host
notification—
T
hn
, 3) the time for a host-side memory copy to
fetch data (detailed later in Data Fetching)—
S
data
V
host
, and 4) the
292 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association
delay of host-to-guest notification through interrupt injection
for returning the control flow to the guest app—
T
gn
. Here
the ring buffer does not directly store the data; instead, to
transfer a large volume of data, it holds a number of (currently
1024) pointers, each of which points to another ring buffer of
the same size, whose buffer item stores the data’s physical
addresses. Therefore, the blocking strategy’s time overhead
T
blocking
is the sum of them:
T
blocking
= T
ring
+T
hn
+
S
data
V
host
+T
gn
Here we encounter a challenge:
T
hn
is dependent on the arrival
notification strategy which we have not decided yet. Fortu-
nately, we find that when the control flow blocking strategy is
adopted, the app thread’s execution flow has already stopped.
Thus, a VM Exit’s side effect no longer matters in this case,
but its advantage of short delay makes it an appropriate choice.
We then naturally take the VM Exit-based arrival notification
strategy, so T
hn
generally equals the delay of a VM Exit.
On the other hand, if we choose to leverage a kernel per-
sistent space for data persistence, the time overhead comes
from 1) a memory copy to the persistent space and 2) adding
the data to the ring buffer, i.e.,
T
persistent
=
S
data
V
guest
+ T
ring
. After
the above are finished, the guest app’s control flow is immedi-
ately returned to its user space for executing its next program
logic, while the host asynchronously polls for data arrival and
fetches data (as to be detailed later).
Based on the calculated
T
blocking
and
T
persistent
, we can then
choose the data persistence strategy with a smaller delay. Also,
for synchronous API call data, we directly choose the blocking
strategy because during synchronous calls the control flow
is naturally blocked until host-side executions. With respect
to the parameters used in the above analysis, they can be
either directly obtained (e.g.,
S
data
) or statistically estimated
by monitoring their recent values and calculating the average
(e.g., V
guest
and V
host
).
Arrival Notification.
After the data are added to the ring
buffer, we then need to choose a proper strategy for notifying
the host of data arrival. In practice, we find that the arrival
notification strategy is closely related to the data persistence
strategy. Specifically, control flow blocking is particularly
sensitive to the arrival notification delay, and thus should be
coupled with VM Exits. On the contrary, the persistent space-
based strategy allows arrival notification and data fetching to
be asynchronous, and thus the polling-based strategy should
be selected; the polling is performed by a host-side data fetch-
ing thread (referred to as Data Fetcher) every millisecond.
Data Fetching.
When Data Fetcher is notified of data ar-
rival, it would read the ring buffer to acquire the data. If the
data are contiguous in the guest physical memory (and thus
contiguous in the host virtual memory), the data can be di-
rectly accessed without further memory copy; otherwise, they
should be copied to a contiguous host buffer. The fetched
data are then distributed to the host render engine’s rendering
threads for realizing actual rendering.
7 Implementation
To realize Trinity, we make multiple modifications to the guest
Android system and QEMU. First, we find that Android (as
well as many UI-centric systems) clearly separates its versa-
tile user-level graphics frameworks/libraries [6, 49] from the
underlying system graphics library that realizes actual ren-
dering. This enables us to effectively delegate every graphics
API call by customizing only the system graphics library. At
the guest user space, we replace the original system graph-
ics library (i.e.,
libGLES
) with our customized one, which
maintains the projection space and conducts flow control. The
library exposes the standard OpenGL ES interfaces to apps,
allowing them to seamlessly run without modifications.
To execute the delegated Type-1 and Type-2 APIs in the
projection space, we implement all of them in the system
graphics library, involving a total of 220 Type-1 APIs, 128
Type-2 APIs and 10 Type-3 APIs, which fully cover the stan-
dard OpenGL ES APIs from OpenGL ES 2.0 to the latest
OpenGL ES 3.2. Additionally, we implement all the 54 An-
droid Native Platform Graphics Interface (EGL) [5] functions
to interface with the Android native window system. In prac-
tice, many APIs have similar functions, simplifying their im-
plementations, e.g.,
glUniform
has 33 variants used for data
arrays of different sizes and data types, such as
glUniform2f
for two floats and glUniform3i for three integers.
At the guest’s kernel space and the host, we realize data
teleporting via a QEMU virtual PCI device and a guest kernel
driver. As a typical character device driver, our kernel driver
mounts a device file in the guest filesystem, where the user-
space processes can read from and write to so as to achieve
generic data transferring. With this, API calls that require
host-side executions are compacted in a data packet and dis-
tributed to our host-side render engine. The render engine
then leverages the desktop OpenGL library to perform actual
rendering using the host GPU.
Trinity is implemented on top of QEMU 5.0 in 118K lines
of (C/C++) code (LoC). In total, the projection space, flow
control and data teleporting involve 113K LoC, 220 LoC
and 5K LoC, respectively. Among all the code, only around
2K LoC are OS-specific, involving kernel drivers and native
window system interactions.
Trinity hosts the Android-x86 system (version 9.0). Since
our modifications to QEMU and Android-x86 are dynamic
libraries and additional virtual devices, they can be easily ap-
plied to higher-version QEMU and Android. Trinity can run
on most of the mainstream OSes (e.g., Windows 10/11 and ma-
cOS 10/11/12) with both Intel and AMD x86 CPUs. It utilizes
hardware-assisted technologies (e.g., Intel VT and AMD-V)
for CPU/memory virtualization. For the compatibility with
ARM-based apps, Trinity incorporates Intel Houdini [29] into
the guest system for dynamic binary translation.
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 293
8 Evaluation
We evaluate Trinity with regard to our goal of simultaneously
maintaining high efficiency and compatibility. First, we de-
scribe our experiment setup in §
8.1. Next, we present the
evaluation results in §
8.2, including 1) Trinity’s efficiency
measurement with standard 3D graphics benchmarks, 2) Trin-
ity’s smoothness situation with the top-100 3D apps from
Google Play, and 3) Trinity’s compatibility with 10K apps
randomly selected from Google Play. Finally, we present the
performance breakdown in §8.3 by removing each of the three
major system mechanisms—projection space, flow control
and data teleporting.
8.1 Experiment Setup
To understand the performance of Trinity in a comprehen-
sive manner, we compare it with six mainstream emulators,
including GAE, QEMU-KVM, VMware Workstation, Blues-
tacks, and DAOW, as well as Windows Subsystem for Android
(WSA)—a Hyper-V-based emulator released in Windows 11.
Their architectures and graphics stacks are shown in Table 1.
We use their latest versions as of Dec. 2021.
Software and Hardware Configurations.
Regarding the
configurations of these emulators, we set up all their instances
with a 4-core CPU, 4 GB RAM, 64 GB storage, and 1080p
display (i.e., the display width and height are 1920 pixels and
1080 pixels, respectively) with 60 Hz refresh rate. However,
since WSA does not allow customizing configurations, we use
its default settings which utilize the host system’s resources
to the full extent. For other options (e.g., network) in the
emulators, we also leave them as default.
Our evaluation is conducted on a high-end PC and a middle-
end PC. The former has a 6-core Intel i7-8750H CPU @2.2
GHz, 16 GB RAM (DDR4 2666 MHz), and a NVIDIA GTX
1070 MAX-Q dedicated GPU. The latter has a 4-core Intel i5-
9300H CPU @2.4 GHz, 8GB RAM (DDR4 2666 MHz), and
an Intel UHD Graphics 630 integrated GPU. Their storage
devices are both 512 GB NVME SSD. Regarding the host OS,
we run most of the abovementioned emulators on Windows
11 (latest stable version) given that WSA, Bluestacks, and
DAOW are Windows-specific. However, since QEMU-KVM
is Linux-specific, we run it on Ubuntu 20.04 LTS which is
also the latest stable version as of Dec. 2021.
Workloads and Methodology.
We use three different work-
loads to drive the experiments, in order to dig out the multi-
aspect performance of Trinity. First, we use representative
3D graphics benchmark applications: 3DMark [
34] and
GFXBench [32], both of which are widely used for evaluating
mobile devices’ GPU performance. Together they provide
three specific benchmarks, which are referred to as Sling-
shot Unlimited Test 1 (3DMark), Slingshot Unlimited Test
2 (3DMark) and Manhattan Offscreen 1080p (GFXBench).
Table 1: Comparison of the evaluated emulators.
Mobile Emulator
System Architecture Graphics Stack
GAE [23]
x86 Android on
customized QEMU
API remoting
WSA [41]
x86 Android on
Windows Hyper-V
API remoting
QEMU-KVM [46]
Android-x86
on QEMU
Device emulation
VMware
Workstation [
52]
Android-x86 on
VMware Workstation
Device emulation
Bluestacks [14]
Android-x86
on VirtualBox
Proprietary
DAOW [55]
Direct Android
emulation on Windows
API translation
with ANGLE [
22]
These benchmarks generate complex 3D scenes in an off-
screen manner, i.e., the rendering results are not displayed on
the screen and thus is not limited by the screen’s refresh rate,
so the graphics system’s full potential can be tested. In detail,
we run each benchmark on every emulator and hardware envi-
ronment for five times, and then calculate the average results
together with the error bars. Also, since the benchmarks come
with Windows versions as well, we further run them directly
on Windows to figure out the native hardware performance.
Second, to understand Trinity’s performance on real apps,
we run the top-100 3D (game) apps from Google Play as
of 11/20/2021 [
51], which are the same 100 apps discussed
in §
2.2. Concretely, for each of the apps, one of the authors
manually runs a (same) full game set on every emulator, and
repeats the experiment five times. During an app’s running, we
log the FPS (Frames Per Second) values of the app, which is a
common indicator of a mobile system’s running smoothness.
We then use the average FPS value of the five experiments
as the final FPS value of the app. Generally, we find that for
all the studied apps, the standard deviations of the five experi-
ments are all less than 4 FPS, indicating that the workloads
are mostly consistent among different experiments. Since all
the apps adopt the V-Sync mechanism to align their framer-
ates with the screen’s refresh rate (which is 60 Hz), their FPS
values are always smaller than 60.
Third, to further evaluate Trinity’s compatibility, we ran-
domly select 10K apps from Google Play in Trinity. We use
the Monkey UI exerciser [24] to generate random input events
for each app for one minute, and monitor possible app crashes.
8.2 Evaluation Results
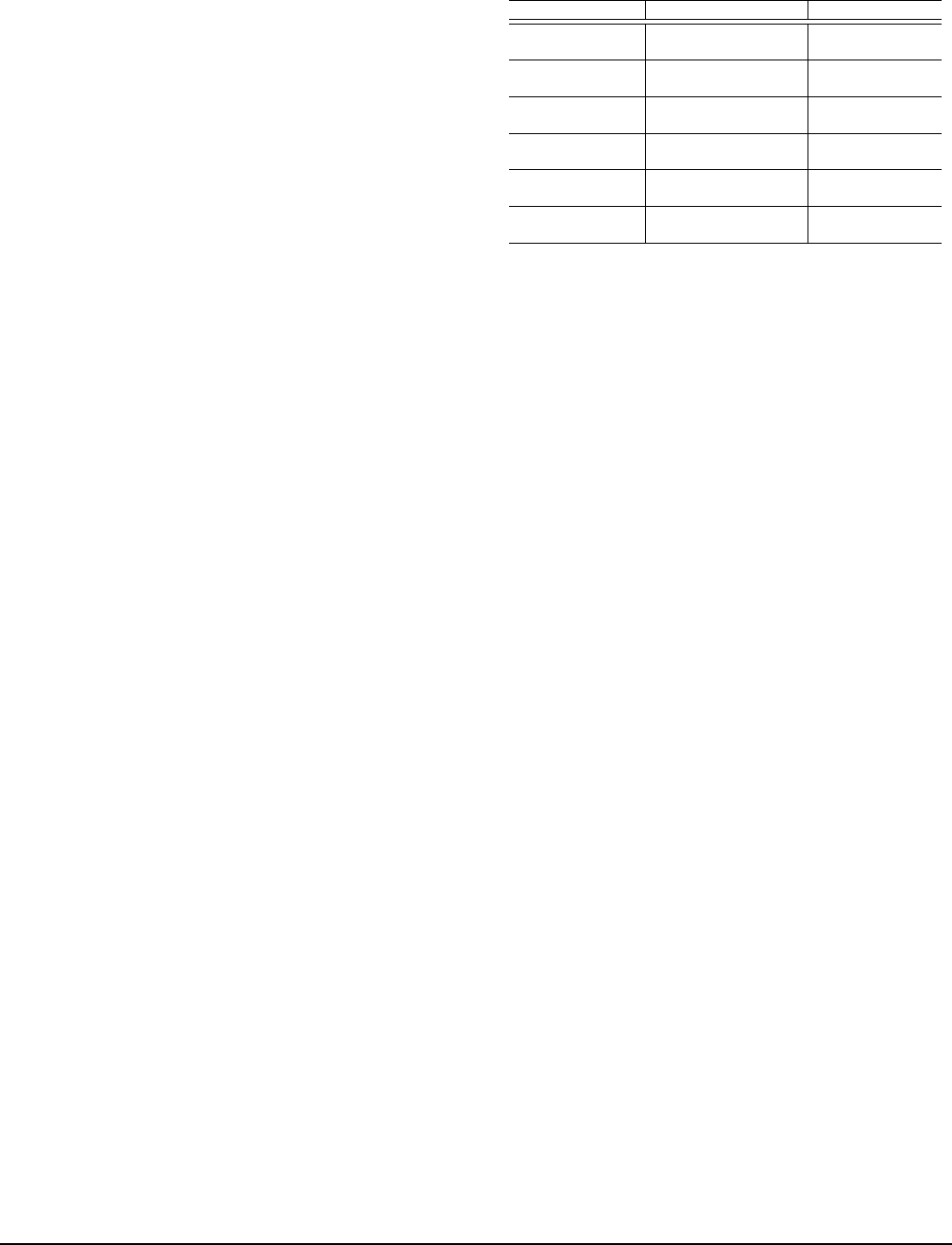
Graphics Benchmark.
Figure 8 and Figure 9 illustrate the
graphics benchmarks’ results obtained on the high-end PC
and the middle-end PC, respectively. Results of DAOW and
WSA are not complete because they cannot successfully run
all the benchmarks due to missing graphics APIs or abnormal
API behaviors as complained by the benchmark apps. As
shown, compared to the other emulators, Trinity can achieve
the best efficiency on all the three benchmarks with both PCs.
294 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association
Native PC Trinity DAOW Bluestacks GAE VMware WSA QEMU-KVM
0
100
200
300
400
500
Frames Per Second
Slingshot Unlimited Test 1 (3DMark)
Slingshot Unlimited Test 2 (3DMark)
Manhattan Offscreen 1080p (GFXBench)
Figure 8: Benchmark results on the high-end PC.
Native PC Trinity DAOW Bluestacks GAE VMware WSA QEMU-KVM
0
10
20
30
40
50
60
70
Frames Per Second
Slingshot Unlimited Test 1 (3DMark)
Slingshot Unlimited Test 2 (3DMark)
Manhattan Offscreen 1080p (GFXBench)
Figure 9: Benchmark results on the middle-end PC.
Specifically, on the high-end PC that is equipped with a
dedicated GPU, Trinity can outperform DAOW by an average
of 40.5%, and reach 93.3% of the high-end PC’s native hard-
ware performance. In particular, for Slingshot Unlimited Test
1 we can achieve 110% native performance. This is attributed
to the graphics memory pool (§4.2) maintained by Trinity at
the host which can fully exploit the host GPU’s DMA capa-
bility. Instead, the native version of the benchmark leverages
synchronous data delivery into the GPU rather than a DMA-
based approach, causing suboptimal performance. Further on
the middle-end PC, we observe that Trinity can outperform
the other emulators by at least 12.7%, indicating that Trinity
can still maintain decent efficiency even on an integrated GPU
with much poorer performance.
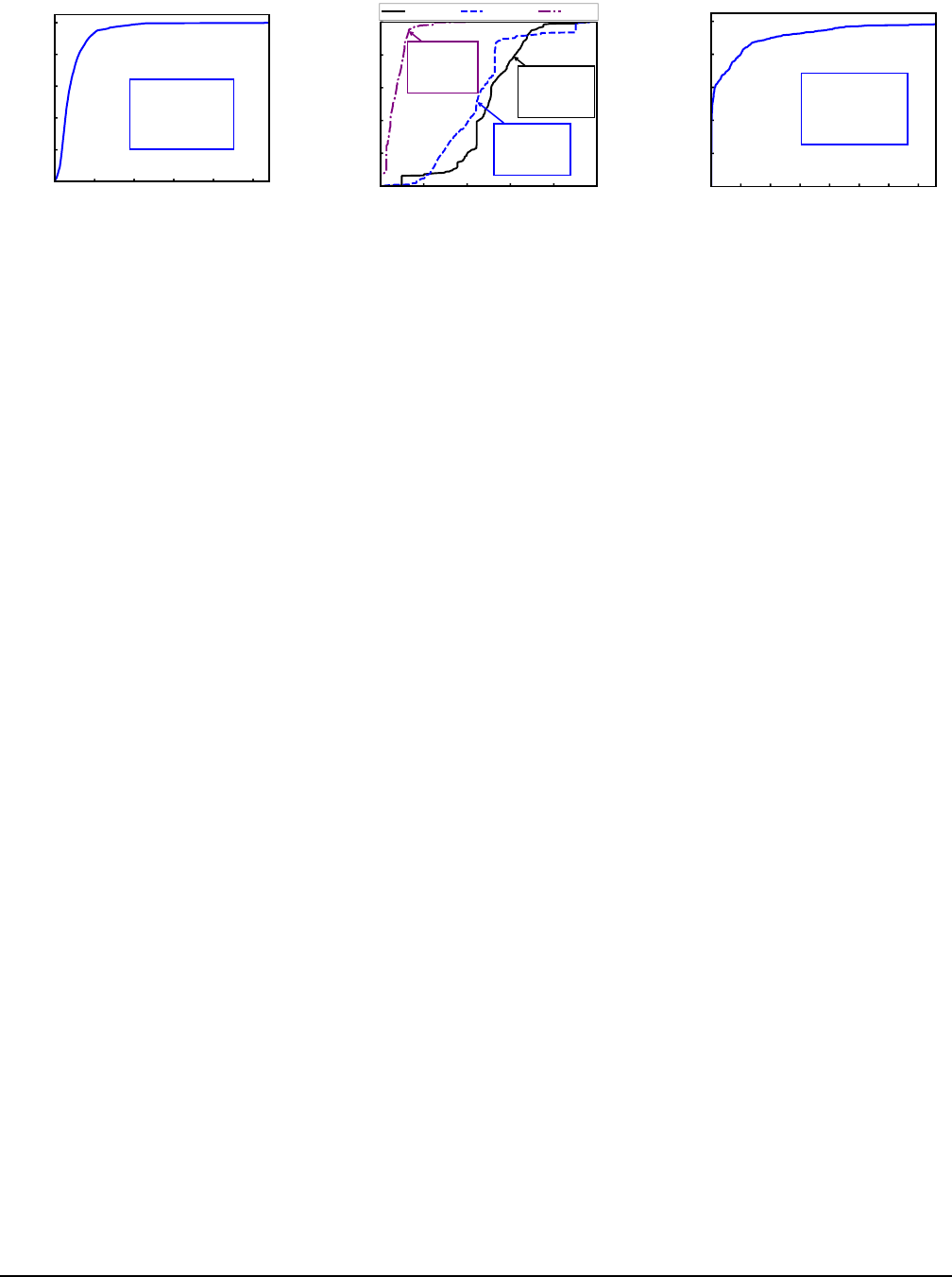
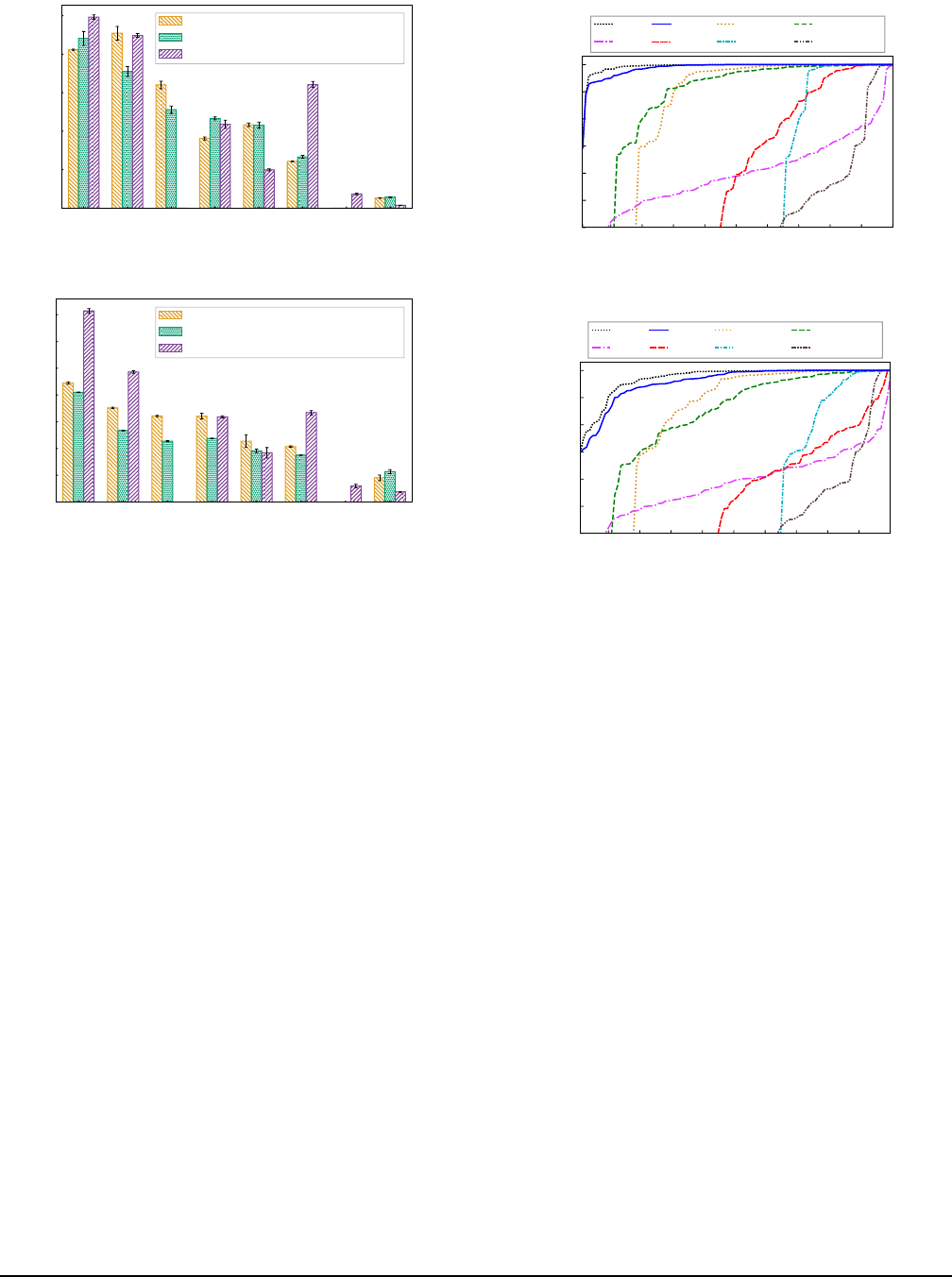
Top-100 3D Apps.
Figure 10 depicts the average FPS of
the top-100 3D apps from Google Play on different emulator
platforms, when the apps are ranked by their FPS values on
the corresponding emulator. Particularly, if an app cannot be
successfully executed on (i.e., is incompatible with) an em-
ulator, its FPS value is taken as zero. Thus, the FPS values
can reflect both the compatibility and efficiency of different
emulators. In this regard, Trinity outperforms the other emu-
lators by an average of 22.4%
∼
538% on the evaluated PCs.
We next look into the compatibility and efficiency aspects of
the evaluated emulators, respectively.
For compatibility, the numbers of compatible apps of Trin-
ity, DAOW, Bluestacks, GAE, WSA, VMware, and QEMU-
1 10 20 30 40 50 60 70 80 90 100
Apps by Increasing FPS
0
10
20
30
40
50
60
Frames Per Second
Best
GAE
Trinity
WSA
DAOW
VMware
Bluestacks
QEMU-KVM
(a) High-end PC.
1 10 20 30 40 50 60 70 80 90 100
Apps by Increasing FPS
0
10
20
30
40
50
60
Frames Per Second
Best
GAE
Trinity
WSA
DAOW
VMware
Bluestacks
QEMU-KVM
(b) Middle-end PC.
Figure 10: Average FPS of the top-100 3D apps across dif-
ferent emulators on the high-end and middle-end PCs. The
“Best” line represents the highest FPS among the evaluated
emulators of each app. If an app cannot run normally on an
emulator, its corresponding FPS value is taken as zero.
KVM are 100, 82, 89, 91, 55, 35 and 36, respectively. Delv-
ing deeper, we find that the root causes of other emulators’
worse performance vary significantly. In detail, VMware and
QEMU-KVM show the worst compatibility, mostly because
their guest-side graphics stacks are both built atop the open-
source desktop Linux graphics library Mesa [39], whose API
behaviors sometimes differ from that of a typical Android
graphics library. For GAE, its incompatibility with apps in
fact roots in its poor efficiency—many incompatible apps
become unresponsive for a long time during a game set, thus
leading to Application Not Responding (ANR) [ 4]. For WSA,
the problem is generally the same as GAE, as we find that
WSA reuses most of the GAE’s host-side and guest-side sys-
tem components. Differently, its lack of Google Play Service
(essential for many apps’ running) in the guest system intro-
duces more compatibility issues. For Bluestacks, its stable
version runs an outdated Android 7.0 guest system, and thus
cannot run some recent apps. Notably, despite the selective
translation of system calls (cf. §1.1) that compromises com-
patibility, DAOW’s compatibility with the 100 game apps is
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 295

only slightly worse than GAE, because it focuses on translat-
ing system calls frequently used by games [55].
For efficiency, we conduct a pairwise comparison between
Trinity and each of the emulators in terms of the FPS of the
apps that Trinity and the compared emulator can both suc-
cessfully execute. On the high-end PC, Trinity outperforms
DAOW, Bluestacks, GAE, WSA, VMware and QEMU-KVM
in terms of the compatible apps by an average of 6.1%, 9.8%,
164.8%, 34.1%, 8.6%, and 132.2%, respectively. We observe a
significant visual difference between Trinity and GAE, WSA,
and QEMU-KVM across all apps. We observe less visual dif-
ference between Trinity and DAOW, Bluestacks, and VMware
for many apps. However, the visual difference is very notice-
able especially on apps where Trinity performs more than 15
FPS better, for which there were 9, 12, and 5 apps for DAOW,
Bluestacks, and VMware, respectively. Regarding the average
FPS values of individual apps, we find that Trinity shows the
best efficiency on 76 of the apps. For the 24 apps that Trinity
shows worse efficiency, we find that the differences in the
apps’ average FPS values are all less than 6 FPS, with 12
of them are in fact less than 1 FPS. On these apps, we find
that there is not any notable smoothness difference between
Trinity and the emulators that yield the best FPS.
Similar situations can also be observed on the middle-end
PC (as demonstrated in Figure 10b). Trinity outperforms
DAOW, Bluestacks, GAE, WSA, VMware and QEMU-KVM
on the middle-end PC in terms of the compatible apps by an
average of 4.9%, 16.1%, 168.7%, 84.6%, 17%, and 137.7%,
respectively. Also, although there are more (42) apps where
Trinity does not yield the best efficiency, the FPS differences
are still mostly insignificant, with 36 of them being less than
5 FPS. For the remaining 6 apps, DAOW has the best FPS
and outperforms Trinity by 6 to 9 FPS, though we could not
perceive any visual difference between the two. Careful ex-
amination of the apps’ runtime situations shows that they tend
to heavily stress the CPU as its graphics scenes involve many
physics effects such as collisions and reflections, which re-
quire the CPU to perform heavy computations such as matrix
transformations. Thus, DAOW’s directly interfacing with the
hardware CPU without the virtualization layer allows it to
perform better than Trinity (as well as the other emulators),
particularly given the middle-end PC’s rather weak CPU. In
comparison, Trinity performs better than DAOW for all the 6
apps on the high-end PC.
Compatibility with Random 10K Apps.
For the apps ran-
domly selected from Google Play, we can successfully install
all of them and run 97.2% of them without incurring app
crashes. For the apps we cannot run, we find that some (2.3%)
of them have also exhibited crashes on real devices; In addi-
tion, 0.43% require special hardware that Trinity currently has
not implemented, e.g., GPS, NFC and various sensors, which
is not hard to fix given the general device extensibility of
QEMU that Trinity is built on. Finally, the remaining 0.07%
seem to actively avoid being run in an emulator by closing
themselves when they notice that certain hardware configura-
tions (e.g., the CPU specification listed in
/proc/cpuinfo
)
are that of an emulator as complained in their runtime logs.
8.3 Performance Breakdown
To quantitatively understand the contributions of the proposed
mechanisms to Trinity’s efficiency, we respectively remove
each of the three major mechanisms of Trinity (i.e., projection
space, flow control and data teleporting), and measure the re-
sulting efficiency degradations when running the top-100 3D
apps on the high-end PC. In detail, removing projection space
degrades Trinity to API remoting, whose guest-host control
and data exchanges are still backed by our data teleporting
mechanism. Removing data teleporting disables all the static
timing analysis logics apart from data aggregation, which al-
lows us to retain at least the data transferring performance of
GAE since it also adopts a moderate buffer to batch void API
calls. For data persistence and arrival notification, we adopt
control flow blocking and VM Exit following GAE’s design.
Further, to fully demonstrate the efficiency impacts of the
three mechanisms, we also measure the performance break-
down when the maximum framerate restriction (which is 60
FPS) of the apps is removed. Note that we do not remove
this restriction when evaluating the top-100 3D apps in §8.2
since this requires source code modifications to the emulators,
while many of the emulators are proprietary (e.g., DAOW
and Bluestacks). Figure
11 depicts the average FPS values
of the top-100 3D apps in the breakdown experiments with
the 60-FPS framerate restriction, while Figure 12 shows the
results without the framerate restriction.
Projection Space.
After the projection space is removed, the
average FPS drops by 6.1
×
(8.6
×
) with (without) the framer-
ate restriction, providing the most significant efficiency bene-
fits. This is not surprising as our in-depth analysis of the API
call characteristics (by instrumenting our system graphics li-
brary as discussed in §2.2 during the breakdown experiments)
shows that with the projection space, 99.93% of graphics API
calls do not require synchronous host-side executions. The
remaining 0.07% API calls are Type-1 calls related to the
context information we do not maintain in shadow contexts,
including the rendered pixels and execution status of a GPU
as discussed in §4.1.
Among these asynchronously-executed calls, 26% are di-
rectly resolved at the projection space (with our maintained
context and resource information), fundamentally avoiding
their needs for any host-side executions. Such calls are mostly
related to context manipulation and context/resource informa-
tion querying. For the remainder (74%), they involve APIs
for resource allocations and populations, as well as drawing
calls. We also measure the memory consumption of the added
projection space when running the top-100 3D apps by mon-
itoring the maximum memory consumed by our provided
296 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association

1 10 20 30 40 50 60 70 80 90 100
Apps by Increasing FPS
0
10
20
30
40
50
60
Frames Per Second
Trinity
w/o Flow Control
w/o Projection Space
w/o Teleporting
Figure 11: Performance breakdown with
regard to the top-100 3D apps with fram-
erate restriction.
1 10 20 30 40 50 60 70 80 90 100
Apps by Increasing FPS
0
50
100
150
200
Frames Per Second
Trinity
w/o Flow Control
w/o Projection Space
w/o Teleporting
Figure 12: Performance breakdown with
regard to the top-100 3D apps without
framerate restriction.
4 KB
8 KB
16 KB
32 KB
64 KB
128 KB
256 KB
512 KB
1 MB
2 MB
4 MB
8 MB
16 MB
32 MB
64 MB
128 MB
Data Chunk Size
0
4
8
12
16
20
Throughput (GB/s)
Data Teleporting 1 thread
Data Teleporting 2 threads
goldfish-pipe 1 thread
goldfish-pipe 2 threads
Figure 13: Throughput of data teleporting
and
goldfish-pipe
, with one and two
threads.
4 KB
8 KB
16 KB
32 KB
64 KB
128 KB
256 KB
512 KB
1 MB
2 MB
4 MB
8 MB
16 MB
32 MB
64 MB
128 MB
Data Chunk Size
0
4
8
12
16
20
Throughput (GB/s)
Data Teleporting 3 threads
Data Teleporting 4 threads
goldfish-pipe 3 threads
goldfish-pipe 4 threads
Figure 14: Throughput of data teleporting
and
goldfish-pipe
, with three and four
threads.
4 KB
8 KB
16 KB
32 KB
64 KB
128 KB
256 KB
512 KB
1 MB
2 MB
4 MB
8 MB
16 MB
32 MB
64 MB
128 MB
Data Chunk Size
4
8
12
16
Throughput (GB/s)
Data Teleporting 1 thread
Data Teleporting 2 threads
Strategy Exhaustion 1 thread
Strategy Exhaustion 2 threads
Figure 15: Throughput of data teleporting
using strategy exhaustion and static tim-
ing analysis, with one and two threads.
4 KB
8 KB
16 KB
32 KB
64 KB
128 KB
256 KB
512 KB
1 MB
2 MB
4 MB
8 MB
16 MB
32 MB
64 MB
128 MB
Data Chunk Size
8
12
16
20
Throughput (GB/s)
Data Teleporting 3 threads
Data Teleporting 4 threads
Strategy Exhaustion 3 threads
Strategy Exhaustion 4 threads
Figure 16: Throughput of data teleporting
using strategy exhaustion and static tim-
ing analysis, with three and four threads.
system graphics library at the guest side. We find that the
projection space only takes an average of 466 KB (at most
1021 KB) memory for an app. The memory consumption is
small because the shadow contexts and resource handles are
mostly small integers, and our careful resource management
has prevented redundant memory usages.
Flow Control.
On the other hand, flow control contributes
2.7% (5%) FPS improvement on average with (without) the
framerate restriction. This is because flow control mainly
serves to mitigate the control flow oscillation problem (cf.
§5), thus contributing less to the running smoothness as mea-
sured by FPS. To quantify the actual effects of flow control,
we further measure the occurrences of control flow oscil-
lations during the apps’ running. As a result, without flow
control, control flow oscillation occurs 20× more frequently
on average. When that happens, as discussed in §5, the apps’
animations will look extremely unsmooth from users’ per-
spective since many essential frames of the animations are
skipped (i.e., not rendered) by the apps as dictated by the delta
timing principle, while the total number of frames rendered
per second (i.e., FPS) remains mostly unchanged.
Data Teleporting.
Finally, when data teleporting is disabled,
the fixed data delivery strategy cannot well adapt to system
and data dynamics, leading to 1.7
×
(2.2
×
) FPS degradation
with (without) the framerate restriction. To demystify the effi-
ciency gains brought by data teleporting, we further examine
its throughput under diverse system and data dynamics on
the high-end PC. Specifically, we develop a benchmark app
that synthesizes data chunks ranging from 4 KB (a contin-
uous memory page space) to 128 MB, and doubles the size
for each successive experiment. In each experiment, the app
writes the data chunk to our kernel character device file (cf.
§7) to transfer it to the host 1,000 times with one, two, three,
or four threads; here the number of threads varies from one
to four (the number of the emulator’s CPU cores) to mimic
different system dynamics. By measuring the time consumed
for data transfer, we can calculate the final throughput result.
In comparison, we conduct the same experiments on GAE’s
guest-host I/O pipe called
goldfish-pipe
, which is GAE’s
core infrastructure for sending API call data from the guest to
the host and realizing API remoting. To this end, we customize
GAE to include a dedicated graphics API for throughput
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 297

measurement, which our benchmark app can call to transfer
guest data to the host as described above. This API is made
to be a void API so that GAE’s buffer for batching void APIs
can take effect. Consequently, as shown in Figure 13 and
Figure 14, data teleporting’s throughput clearly exceeds that
of
goldfish-pipe
under all the data and thread settings. On
average, data teleporting’s throughput is 5.3 times larger than
that of goldfish-pipe.
Furthermore, we wish to know the effectiveness of static
timing analysis. For this purpose, we measure the perfor-
mance of the data teleporting mechanism using the above
experiments when we adopt every possible strategy. Then,
we compare the highest throughput produced by the above
strategy exhaustion with that produced by the static timing
analysis. As shown in Figure 15 and Figure 16, the through-
put values produced by strategy exhaustion and static timing
analysis are very close (4% average deviation). More in detail,
static timing analysis can make the most suitable strategy
choice in 95.4% of the data delivery tasks.
9 Related Work
Commercial Mobile Emulators.
A plethora of commercial
mobile emulators have similar architectures to the ones we
evaluate in §8. For instance, Anbox [3], which directly runs
Android’s Framework layer on a Linux PC, leverages the con-
tainer technique to achieve lightweight guest-host isolation,
and reuses GAE’s graphics stack—all the guest-side graph-
ics operations are sent to a host-side daemon for execution,
thus requiring synchronous inter-process communications.
Accordingly, its efficiency is similar to that of GAE.
LDPlayer [35], MEmu [38], NoxPlayer [42] and Genymo-
tion [20] all adopt the AOVB (Android-x86 on VirtualBox)
architecture (as in Bluestacks). To realize graphics rendering,
they also reuse some of the graphics libraries of GAE, e.g.,
libGLESv2_enc
at the guest that encodes OpenGL ES API
calls into a data packet, and ANGLE [22] at the host that
translates guest-side OpenGL ES calls to desktop OpenGL
or Direct3D calls. Prior measurements [13, 55] show that the
performance of such AOVB-based emulators is close to that
of Bluestacks, probably due to their similar architectures.
GPU Virtualization.
In PC/server virtualization, GPU mul-
tiplexing is typically achieved through hardware-assisted
GPU passthrough [1, 2] or mediated passthrough [27, 30, 43],
which allow a virtual machine (VM) to directly access the
host GPU by remapping its DMA channels and interrupts to
the guest. Differently, GPU passthrough monopolizes the host
GPU, while the mediated approach allows sharing the GPU
among multiple VMs through GPU context isolation.
However, the substantial differences between the graphics
stacks of desktop OSes and mobile OSes significantly hinder
their adoption by mobile emulators, as host GPUs’ drivers are
missing in mobile systems and developing them for mobile
environments is extremely complicated (since mainstream
desktop GPUs’ specifications are often proprietary). Hence,
we take a completely different approach of graphics projection
to address the problem of multiplexing the host GPU, which
is agnostic to the underlying hardware specifications and thus
should also be beneficial to PC/server GPU virtualization.
Cross-OS and Cross-Device Graphics Stacks.
Trinity fo-
cuses on Android emulation on a PC, while several researches
have explored running iOS apps on Android graphics stacks
based on their similarities in OpenGL ES libraries [7, 8]. This
suggests that Trinity’s graphics projection mechanism might
also be applicable to the emulation of iOS apps on a PC.
Also, various approaches remote graphics processing from
one device to another over a network [9
–
11, 25, 47, 48]. For
them, data exchanges over network often constitute a ma-
jor bottleneck, which is similar to the bottleneck of frequent
cross-boundary control/data exchanges in the virtualization
setting. Thus, our idea of decoupling guest/host control and
data flows via graphics projection should also be useful to
relevant studies and applications, e.g., cloud/edge gaming.
10 Conclusion
In this paper we present the design, implementation, perfor-
mance, and preliminary deployment of the Trinity mobile
emulator. It substantially boosts the efficiency of mobile emu-
lation while retaining high compatibility and security through
graphics projection, a novel approach that minimizes the cou-
pling between the guest-side and host-side graphics process-
ing. This unique design, together with strategic flow control
and data teleporting, make Trinity a first-of-its-kind emula-
tor that can smoothly run heavy 3D mobile games (achiev-
ing near-native hardware performance) and meanwhile retain
comprehensive app support and solid guest-host isolation.
As part of a major commercial Android IDE, Trinity is
expected to be used by millions of Android developers in
the near future, contributing vibrantly to the ecosystem. We
believe that many lessons and experiences gained from this
work could also be applied to (graphics-heavy) PC emulation
and cloud/edge gaming, as to be explored in our future work.
Acknowledgements
We would like to express our deepest appreciation to our
shepherd, Jason Nieh, who was very responsive during our
interactions with him and provided us with valuable sugges-
tions, which have significantly improved our paper. We also
thank the anonymous reviewers for their constructive sug-
gestions. We thank Wei Liu and Xinlei Yang for their help
in data collection and analysis. This work is supported in
part by the National Key R&D Program of China under grant
2021YFB2900100, as well as the National Natural Science
Foundation of China (NSFC) under grant 61902211.
298 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association

A Artifact Appendix
Abstract
Trinity’s artifact is publicly available at GitHub. To facilitate
developing and using Trinity, we provide step-by-step instruc-
tions in the form of both documentations and videos. Please
refer to our README file at
https://github.com/Tri
nityEmulator/TrinityEmulator
for details.
Scope
The artifact can be used to reproduce all the major results,
including those of the graphics benchmarks and 3D apps.
Contents
Trinity’s artifact includes code of the host emulator, binary of
the guest Android system, and our evaluation scripts/data.
Hosting
We host the code/binary and data in two repositories (both in
the main branch). We also provide a DOI for the artifact.
• Trinity Code and Binary.
Link:
https://github.com/TrinityEmulator/Tri
nityEmulator
.
• Evaluation Data and Figure Plotting Script.
Link:
https://github.com/TrinityEmulator/Eva
luationScript
.
• DOI for the Artifact.
DOI: 10.5281/zenodo.6586575
References
[1]
D. Abramson, J. Jackson, S. Muthrasanallur, G. Neiger,
G. Regnier, R. Sankaran, I. Schoinas, R. Uhlig,
B. Vembu, and J. Wiegert. Intel Virtualization Technol-
ogy for Directed I/O. Intel Technology Journal, 2006.
[2]
AMD. I/O Virtualization Technology Specification Re-
vision 1.26. AMD White Paper, 1:2–11, 2009.
[3]
Anbox.com. Anbox: Container-based Android Emula-
tor, 2021. https://anbox.io/.
[4]
Android.org. Application Not Responding of Android,
2021.
https://developer.android.com/topic/
performance/vitals/anr
.
[5]
Android.org. GraphicBuffer: Android’s Na-
tive Window Buffer Implementation, 2021.
https://android.googlesource.com/platf
orm/frameworks/native/+/jb-mr0-release/l
ibs/ui/GraphicBuffer.cpp
.
[6]
Android.org. View: Basic Building Blocks for Android
User Interface, 2021.
https://developer.androi
d.com/reference/android/view/View
.
[7]
J. Andrus, N. AlDuaij, and J. Nieh. Binary Compatible
Graphics Support in Android for Running iOS Apps. In
Proc. of ACM/IFIP/USENIX Middleware, pages 55–67,
2017.
[8]
J. Andrus, A. Van’t Hof, N. AlDuaij, C. Dall, N. Viennot,
and J. Nieh. Cider: Native Execution of IOS Apps on
Android. In Proc. of ACM ASPLOS, pages 367–382,
2014.
[9]
Apple.com. AirPlay: Share Mutimedia Contents across
Devices, 2021.
https://www.apple.com/airpla
y/
.
[10]
R. A. Baratto, L. N. Kim, and J. Nieh. THINC: A
Virtual Display Architecture for Thin-Client Computing.
In Proc. of ACM SOSP, pages 277–290, 2005.
[11]
R. A. Baratto, S. Potter, G. Su, and J. Nieh. MobiDesk:
Mobile Virtual Desktop Computing. In Proc. of ACM
MobiCom, pages 1–15, 2004.
[12]
D. Blaauw, K. Chopra, A. Srivastava, and L. Scheffer.
Statistical Timing Analysis: From Basic Principles to
State of The Art. IEEE Transactions on Computer-Aided
Design of Integrated Circuits and Systems, 27(4):589–
607, 2008.
[13]
Bluestacks.com. Benchmark Performance Compari-
sions among Bluestacks, LDPlayer, Memu, and Nox,
2021.
https://www.bluestacks.com/bluestack
s-vs-ldplayer-vs-memu-vs-nox.html
.
[14]
Bluestacks.com. Bluestacks: Modern Android Gaming
Emulator, 2021. https://www.bluestacks.com/.
[15]
T. Capin, K. Pulli, and T. Akenine-Moller. The State of
the Art in Mobile Graphics Research. IEEE Computer
Graphics and Applications, 28(4):74–84, 2008.
[16]
S. Cook. CUDA Programming: A Developer’s Guide to
Parallel Computing with GPUs. Newnes, 2012.
[17]
M. Dowty and J. Sugerman. GPU Virtualization on
VMware’s Hosted I/O Architecture. ACM SIGOPS Op-
erating Systems Review, 43(3):73–82, 2009.
[18]
J. Duato, A. J. Pena, F. Silla, R. Mayo, and E. S.
Quintana-Ortí. rCUDA: Reducing the Number of GPU-
Based Accelerators in High Performance Clusters. In
Proc. of IEEE HPC, pages 224–231, 2010.
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 299

[19] A. Edmundson, R. Ensafi, N. Feamster, and J. Rexford.
A First Look into Transnational Routing Detours. In
Proc. of ACM SIGCOMM, pages 567–568, 2016.
[20]
Genymotion.com. Genymotion: Android as a Service,
2021. https://www.genymotion.com/.
[21]
L. Gong, Z. Li, F. Qian, Z. Zhang, Q. A. Chen, Z. Qian,
H. Lin, and Y. Liu. Experiences of Landing Machine
Learning onto Market-Scale Mobile Malware Detection.
In Proc. of ACM EuroSys, pages 1–14, 2020.
[22]
Google.com. Almost Native Graphics Layer Engine,
2021. https://github.com/google/angle.
[23]
Google.com. Android Emulator: Simulates Android
Devices on Your Computer, 2021.
https://develo
per.android.com/studio/run/emulator
.
[24]
Google.com. Monkey: Automatic UI/Application Ex-
erciser, 2021.
https://developer.android.com/
studio/test/monkey
.
[25]
Google.com. Stream Content with Chromecast,
2021. https://store.google.com/us/product/
chromecast?hl=en-US
.
[26]
Google.com. SwiftShader: A CPU-Based Implementa-
tion of Graphics APIs, 2021.
https://github.com
/google/swiftshader
.
[27]
A. Herrera. NVIDIA GRID: Graphics Accelerated VDI
with the Visual Performance of a Workstation. NVIDIA
Corp, pages 1–18, 2014.
[28]
Huawei.com. Huawei’s DevEco Studio, 2021.
https://developer.harmonyos.com/en/devel
op/deveco-studio/
.
[29]
Intel.com. Houdini: Translate The ARM Binary Code
into the x86 Instruction Set, 2021.
https://www.in
tel.com/content/www/us/en/products/docs/
workstations/resources/accelerate-game-d
evelopment-houdini-optane-memory.html
.
[30]
Intel.com. Intel GVT-g: Full GPU Virtualization with
Mediated Pass-through, 2021.
https://github.com
/intel/gvt-linux/wiki/GVTg_Setup_Guide
.
[31]
T. Kelly. Scalable TCP: Improving Performance in
Highspeed Wide Area Networks. In Proc. of ACM
SIGCOMM, pages 83–91, 2003.
[32]
Kishonti Ltd. GFXBench: A Unified Graphics Bench-
mark Based on DXBenchmark, 2021.
https://gfxb
ench.com/
.
[33]
A. Kivity, Y. Kamay, D. Laor, U. Lublin, and A. Liguori.
KVM: the Linux Virtual Machine Monitor. In Proc. of
the Linux Symposium, volume 1, pages 225–230, 2007.
[34]
U. Laboratories. 3DMark: Popular Benchmarks for
Gamers, Overclockers, and System Builders, 2021.
https://www.3dmark.com/.
[35]
LDPlayer.com. LDPlayer: Free Android Emulator for
PC, 2021. https://www.ldplayer.net/.
[36]
K. Lee, D. Chu, E. Cuervo, J. Kopf, Y. Degtyarev,
S. Grizan, A. Wolman, and J. Flinn. Outatime: Using
Speculation to Enable Low-Latency Continuous Inter-
action for Mobile Cloud Gaming. In Proc. of ACM
MobiSys, pages 151–165, 2015.
[37]
M. Li, H. Lin, C. Liu, Z. Li, F. Qian, Y. Liu, N. Sun,
and T. Xu. Experience: Aging or Glitching? Why Does
Android Stop Responding and What Can We Do About
It? In Proc. of ACM MobiCom, pages 1–11, 2020.
[38]
MEmu.com. MEmu: The Most Powerful Android Emu-
lator, 2021. https://www.memuplay.com/.
[39]
Mesa.org. The Mesa 3D Graphics Library, 2021.
https://www.mesa3d.org/.
[40]
Microsoft.com. Introduction to Hyper-V on Windows,
2021.
https://docs.microsoft.com/en-us/vi
rtualization/hyper-v-on-windows/about/
.
[41]
Microsoft.com. Windows Subsystem for Android,
2021.
https://docs.microsoft.com/en-us/wi
ndows/android/wsa/
.
[42]
NoxPlayer.com. NoxPlayer: The Perfect Android Em-
ulator to Play Mobile Games on PC, 2021.
https:
//www.bignox.com/
.
[43]
NVIDIA.com. vGPU: Security Benefits of Virtual-
ization as well as the Performance of NVIDIA GPUs,
2021.
https://www.nvidia.com/en-us/data-c
enter/virtual-solutions/
.
[44]
J. Oberheide and C. Miller. Dissecting The Android
Bouncer. SummerCon2012, New York, 95:110, 2012.
[45]
Oracle.com. VirtualBox: A Powerful x86 and
AMD64/Intel64 Virtualization Product, 2021.
https:
//www.virtualbox.org/
.
[46]
QEMU.org. QEMU: A Generic and Open Source
Machine Emulator and Virtualizer, 2021.
https:
//www.qemu.org/
.
[47]
RealVNC.com. VNC; Remote Desktop Access, 2021.
https://www.realvnc.com/en/.
[48]
S. Shi and C.-H. Hsu. A Survey of Interactive Remote
Rendering Systems. ACM Computing Surveys, 47(4):1–
29, 2015.
300 16th USENIX Symposium on Operating Systems Design and Implementation USENIX Association

[49]
Skia.org. Skia: 2D Graphics Rendering Library, 2021.
https://skia.org/.
[50]
Y. Suzuki, S. Kato, H. Yamada, and K. Kono. GPUvm:
Why Not Virtualizing GPUs at the Hypervisor?
[51]
Trinity.github. List of Top-100 3D Apps, 2021.
https://github.com/TrinityEmulator/Evalu
ationScript/#4-top-100-3d-apps
.
[52]
VMware.com. VMware Workstation Pros: Run Win-
dows, Linux and BSD Virtual Machines on a Windows
or Linux Desktop, 2021.
https://www.vmware.com
/products/workstation-pro.html
.
[53]
W. A. Wulf and S. A. McKee. Hitting the Memory Wall:
Implications of the Obvious. ACM SIGARCH Computer
Architecture News, 23(1):20–24, 1995.
[54]
Y. Yan, Z. Li, Q. A. Chen, C. Wilson, T. Xu, E. Zhai,
Y. Li, and Y. Liu. Understanding and Detecting Overlay-
based Android Malware at Market Scales. In Proc. of
ACM MobiSys, pages 168–179, 2019.
[55]
Q. Yang, Z. Li, Y. Liu, H. Long, Y. Huang, J. He, T. Xu,
and E. Zhai. Mobile Gaming on Personal Computers
with Direct Android Emulation. In Proc. of ACM Mobi-
Com, pages 1–15, 2019.
USENIX Association 16th USENIX Symposium on Operating Systems Design and Implementation 301
