
Data Mining Methods for Recommender
Systems
Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
Abstract In this chapter, we give an overview of the main Data Mining techniques
that are applied in the context of Recommender Systems. We first describe common
preprocessing methods such as sampling or dimensionality reduction. Next, we re-
view a the most important classification techniques, including Bayesian Networks
and Support Vector Machines. We describe the so popular k-means clustering algo-
rithm and discuss several alternatives. We also present association rules and present
algorithms for an efficient training process. In addition to introducing these tech-
niques, we survey their uses in Recommender Systems and present cases where
they have been successfully applied.
1 Introduction
Recommender Systems (RS) typically apply techniques and methodologies from
other neighboring areas – such as Human Computer Interaction (HCI) or Infor-
mation Retrieval (IR). However, most of these systems bear in their core an algo-
rithm that can be understood as a Data Mining (DM) technique. In fact, most of
the challenges in Data Mining [65] are also challenges in Recommender Systems
1
:
Xavier Amatriain
Telefonica Research, Via Augusta, 122, Barcelona 08021, e-mail:
xar@tid.es
Alejandro Jaimes
Telefonica Research, Emilio Vargas, 6, Madrid 28043 e-mail:
ajaimes@tid.es
Nuria Oliver
Telefonica Research, Via Augusta, 122, Barcelona 08021 e-mail:
nuriao@tid.es
Josep M. Pujol
Telefonica Research, Via Augusta, 122, Barcelona 08021 e-mail:
jmps@tid.es
1
with the important exception of those related to user interface design
1
2 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
Scalability, Dimensionality, Complex and Heterogeneous Data, Data Quality, Data
Ownership and Distribution, Privacy Preservation, and Streaming Data.
There are many definitions for Data Mining. In the context of this chapter, we
will define Data Mining as the “non-trivial extraction of meaningful information
from large amounts of data by automatic or semi-automatic means”. Data Mining
uses methods and techniques drawn from machine learning, artificial intelligence,
statistics, and database systems. However most of these “traditional” techniques
need to be adapted to account for the high dimensionality and heterogeneity of data
that is pervasive in Data Mining problems.
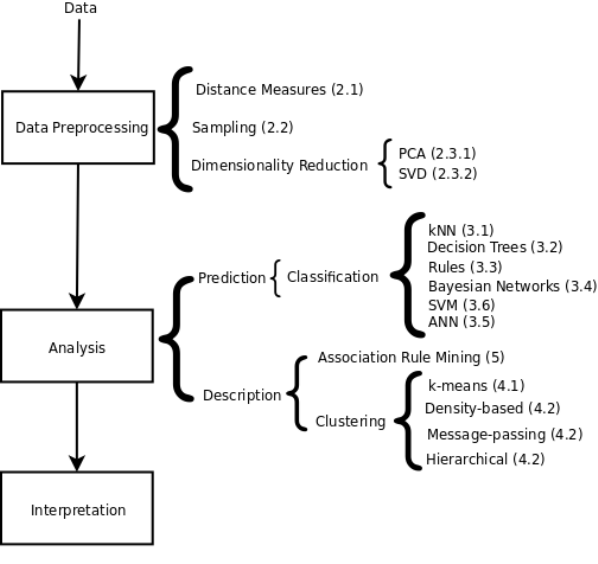
The process of data mining typically consists of 3 steps, carried out in succession:
Data Preprocessing [53], Data Analysis, and Result Interpretation (see Figure
1).
Fig. 1: Main steps and methods in a Data Mining problem, with their correspon-
dence to chapter sections.
We will analyze some of the most important methods for data preprocessing in
Section
2. In particular, we will focus on sampling, dimensionality reduction, and
the use of distance functions because of their significance and their role in recom-
mender systems.
Data Mining Methods for Recommender Systems 3
We usually distinguish two kinds of methods in the analysis step: predictive and
descriptive. Predictive methods use a set of observed variables to predict future or
unknown values of other variables. Prediction methods include classification, re-
gression and deviation detection. Descriptive methods focus on finding meaningful
patterns that help understand and interpret the data. These include clustering, asso-
ciation rule discovery and pattern discovery. Both kinds of methods can be used in
the context of a recommender system.
In Sections 3 through 5, we provide an overview introduction to the analysis
methods that are most commonly used in Recommender Systems: classification,
clustering and association rule discovery (see Figure
1 for a detailed view of the
different topics covered in the chapter).
Note that this chapter does not intend to give a thorough review of Data Mining
methods, but rather to highlight the impact that Data Mining algorithms have in the
Recommender Systems field, and to provide an overview of the key Data Mining
techniques that have been successfully used. We shall direct the interested reader to
Data Mining textbooks (see [25, 65], for example) or the more focused references
that are provided throughout the chapter. Most of the algorithms and techniques
presented in this chapter are also implemented in general purpose machine learning
frameworks such as Weka [66] or Torch [17], or even mathematics and statistical
packages such as Matlab
R
[64] or Octave [22].
2 Data Preprocessing
We define data as a collection of objects and their attributes, where an attribute is
defined as a property or characteristic of an object. Other names for object include
record, item, point, sample, observation, or instance. An attribute might be also be
referred to as a variable, field, characteristic, or feature.
There are different types of data with attributes of varied nature. In addition, real-
life data typically needs to be preprocessed (e.g. cleansed, filtered, transformed) in
order to be used by the machine learning techniques in the analysis step. There
might be missing points, duplicated data, or noise, for instance.
In this section, we focus on three issues that are of particular importance when
designing a recommender system. First, we review different similarity or distance
measures between data points or collections of data points. Next, we discuss the
issue of sampling as a way to reduce the number of items in very large collections
while preserving its main characteristics, or as a way to separate a training and
testing data set. Finally, we describe the most common techniques to reduce the
dimensionality of the data.

4 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
2.1 Similarity Measures
We define similarity as a numerical measure – often falling in the [0,1] range – of
how alike two items are. Having an appropriate similarity function is a key issue
for many data mining algorithms. We usually refer to the distance function, d, as a
numerical measure of how different two items are.
The most common distance measure is the Euclidean distance:
d(x,y) =
s
n
∑
k=1
(x
k
− y
k
)
2
(1)
where n is the number of dimensions (attributes) and x
k
and y
k
are the k
th
attributes
(components) of data objects x and y, respectively. Note that in order to compute the
Euclidean distance, it is necessary to normalize the data if scales differ.
The Minkowski Distance is a generalization of Euclidean Distance:
d(x,y) = (
n
∑
k=1
|x
k
− y
k
|
r
)
1
r
(2)
where r is the degree of the distance. Depending on the value of r, the generic
Minkowski distance is known with specific names: For r = 1, the city block, (Man-
hattan, taxicab or L1 norm) distance; For r = 2, the Euclidean distance; For r → ∞,
the supremum (L
max
norm or L
∞
norm) distance, which corresponds to computing
the maximum difference between any dimension of the data objects.
The Mahalanobis distance is defined as:
d(x,y) =
q
(x− y)
σ
−1
(x− y)
T
(3)
where
σ
is the covariance matrix of the data.
Another very common approach is to consider items as document vectors of an
n-dimensional space and compute their similarity as the cosine of the angle that they
form:
cos(x,y) =
(x• y)
||x||||y||
(4)
where • indicates vector dot product and ||x|| is the norm of vector x. This similarity
is known as the cosine similarity or the L2 Norm.
The similarity between items can also be given by their correlation which mea-
sures the linear relationship between objects. While there are several correlation
coefficients that may be applied, the Pearson correlation is the most commonly
used:
Pearson(x,y) =
Σ
(x,y)
σ
x
×
σ
y
(5)
, where
Σ
is the covariance of data points x and y and
σ
is their standard deviation.
Finally, several similarity measures have been proposed in the case of items that
only have binary attributes. First, the following quantities are computed: M01 = the
Data Mining Methods for Recommender Systems 5
number of attributes where x was 0 and y was 1, M10 = the number of attributes
where x was 1 and y was 0, M00 = the number of attributes where x was 0 and y was
0, M11 = the number of attributes where x was 1 and y was 1.
From those quantities we can compute:
1. The Simple Matching coefficient (SMC):
SMC =
numberofmatches
numberofattributes
=
M11+ M00
M01+ M10+ M00+ M11
(6)
2. The Jaccard coefficient (JC):
JC =
M11
M01+ M10+ M11
(7)
3. The Extended Jaccard (Tanimoto) coefficient (EJC): It is a variation of JC for
continuous or count attributes.
d =
x• y
kxk
2
+ kxk
2
− x• y
(8)
2.1.1 Similarity Measures in Recommender Systems
The most common approach to collaborative filtering in Recommender Systems is
to use the kNN classifier that will be described in Section
3.1. This classification
method – as most classifiers and clustering techniques – is highly dependent on
defining an appropriate similarity measure.
Recommender Systems have traditionally used either the cosine similarity (see
Eq.
4) or the Pearson correlation (see Eq. 5) – or one of their many variations
through, for instance, weighting schemes – as the similarity measure. However,
most of the other distance measures previously reviewed are possible in this con-
text. Spertus et al. [62] did a large-scale study to evaluate six different similarity
measures in the context of the Orkut social network. Although their results might be
biased by the particular setting of their experiment, it is interesting to note that the
best response to recommendations were to those generated using the cosine similar-
ity. Lathia et al. [44] also carried out a study of several similarity measures where
they concluded that, in the general case, the prediction accuracy of a recommender
system was not affected by the choice of the similarity measure. As a matter of
fact and in the context of their work, using a random similarity measure sometimes
yielded better results than using any of the well-known approaches.
2.2 Sampling
Sampling is the main technique used in data mining for selecting a subset of rele-
vant data from a large data set. It is used both in the preprocessing and final data
6 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
interpretation steps. Sampling may be used because processing the entire data set
is computationally too expensive. It can also be used to create training and testing
datasets. In this case, the training dataset is used to learn the parameters or configure
the algorithms used in the analysis step, while the testing dataset is used to evalu-
ate the model or configuration obtained in the training phase, making sure that it
performs well (i.e. generalizes) with previously unseen data.
The key issue to sampling is finding a subset of the original data set that is repre-
sentative – i.e. it has approximately the same property of interest – of the entire set.
The simplest sampling technique is random sampling, where there is an equal prob-
ability of selecting any item. However more sophisticated approaches are possible.
For instance, in stratified sampling the data is split into several partitions based on
a particular feature, followed by random sampling on each partition independently.
The most common approach to sampling consists of using sampling without re-
placement: When an item is selected, it is removed from the population. However, it
is also possible to perform sampling with replacement, where items are not removed
from the population once they have been selected, allowing for the same sample to
be selected more than once.
It is common practice to use standard random sampling without replacement with
an 80/20 proportion when separating the training and testing data sets. This means
that we use random sampling without replacement to select 20% of the instances
for the testing set and leave the remaining 80% for training. Note that the 80/20
proportion should be taken as a rule of thumb: It is generally the case that any value
over 2/3 for the training set is appropriate.
Sampling can lead to an over-specialization to the particular division of the train-
ing and testing data sets. For this reason, the training process is repeated K times as
follows: the training and test sets are created from the original data set, the model
is trained using the training data and tested with the examples in the test set. Next,
different training/test data sets are selected to start the training/testing process again
that is repeated K times. Finally, the average performance of the K learned models
is reported.
This process is known as cross-validation. There are several cross-validation
techniques. In repeated random sampling, a standard random sampling process is
carried out n times. In n-Fold cross validation, the data set is divided into n folds.
One of the folds is used for testing the model and the remaining n− 1 folds are used
for training. The cross validation process is then repeated n times with each of the n
subsamples used exactly once as validation data. Finally, the leave-one-out (LOO)
approach can be seen as an extreme case of n-Fold cross validation where n is set to
the number of items in the data set. Therefore, the algorithms are run as many times
as data points using only one of them as a test each time. It should be noted, though,
that as Isaksson et al. discuss in [40], cross-validation may be unreliable unless the
data set is sufficiently large.
Data Mining Methods for Recommender Systems 7
2.3 Reducing Dimensionality
It is common in Recommender Systems to have not only a data set with features
that define a high-dimensional space, but also very sparse information in that space
– i.e. there are values for a limited number of features per object. The notions of
density and distance between points, which are critical for clustering and outlier
detection, become less meaningful in highly dimensional spaces. This is known
as the Curse of Dimensionality. Dimensionality reduction techniques, as the ones
reviewed in this section, help overcomethisproblem by convertingtheoriginal high-
dimensional space to a lower-dimensionality space. In addition, some algorithms
not only address the problems of data sparsity, but they also bring in welcomed
side-effects such a reduction in the noise or improved computational efficiency.
In the following, we summarize the two most relevant dimensionality reduction
algorithms in the context of Recommender Systems: Principal Component Analysis
(PCA) and Singular Value Decomposition (SVD). These techniques have become so
popular (see
2.3.3) that they are considered as independent approaches to Recom-
mender Systems in themselves. However, they can be used as a preprocessing step
for any of the other techniques that will be reviewed in this chapter.
2.3.1 Principal Component Analysis
Principal Component Analysis (PCA) [41] is a classical statistical method to find
patterns in high dimensionality data sets. PCA allows to obtain an ordered list of
components that account for the largest amount of the variance from the data in
terms of least square errors: The amount of variance captured by the first component
is larger than the amount of variance on the second component and so on. We can
reduce the dimensionality of the data by neglecting those components with a small
contribution to the variance.
Given a data matrix A
n×m
of n samples with m attributes (dimensions) we can
perform the principal component analysis using the algorithm in listing
1.
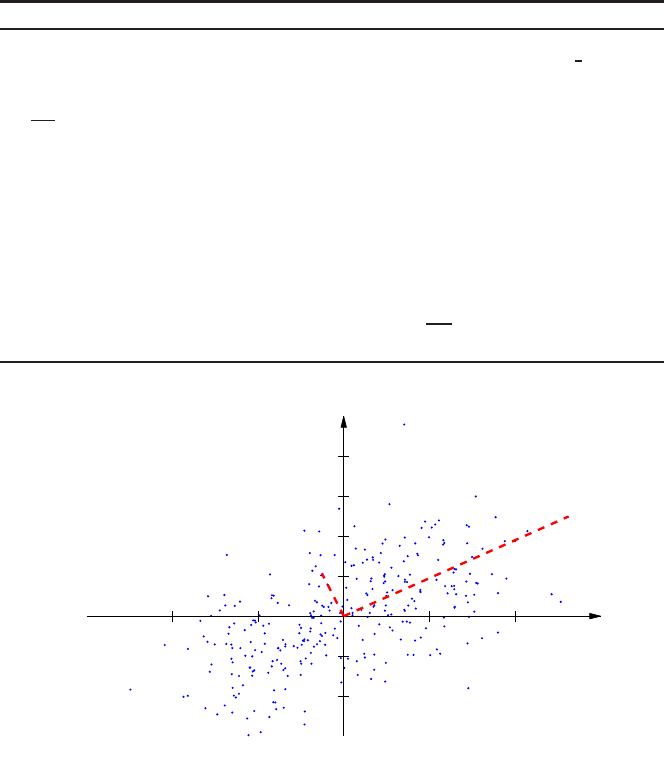
Figure 2 shows the PCA analysis to a two-dimensional point cloud generated by
a combination of Gaussians. After the data is centered, the principal components
are obtained and denoted by u
1
and u
2
. Note that the length of the new coordinates
is relative to the energy contained in their eigenvectors. Therefore, for the partic-
ular example depicted in Fig
2, the first component u
1
accounts for 83.5% of the
energy, which means that removing the second component u
2
would imply losing
only 16.5% of the information.
The rule of thumb is to choose m
′
so that the cumulative energy is above a certain
threshold, typically 90%. PCA allows us to retrieve the original data matrix by pro-
jecting the data onto the new coordinate system X
′
n×m
′
= X
n×m
W
′
m× m
′
. The new
data matrix X
′
contains most of the information of the original X with a dimension-
ality reduction of m− m
′
.
Although PCA is a powerful technique, it does have important limitations. PCA
relies on the empirical data set to be a linear combination of a certain basis. For non-
8 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
Algorithm 1 PCA algorithm
1: Substract the mean. For PCA to work properly, the mean of each of the data dimensions must
be zero. Thus the mean is subtracted from each attribute (column): A
. j
= A
. j
−
1
n
∑
i
A
ij
,∀ j ∈
{1..m}
2: Covariance matrix. Compute the covariance matrix of data A, centered at the origin as C =
1
n−1
A
T
A. The covariance matrix C will be a square matrix of dimensionality m.
3: Calculate Eigenvectors and Eigenvalues. Compute the matrix V of eigenvectors which diag-
onalize the covariance matrix C as V
−1
CV = D, where V contains the eigenvector and the
diagonal of D contains the eigenvalues ({
λ
1
...
λ
m
}).
4: Rearrange eigenvectors and eigenvalues. Once the eigenvectors are computed – which are the
principal components of the analysis, they are sorted in decreasing value of their eigenval-
ues and arranged in a matrix W of dimensionality m: The first principal component – which
captures most of the data variation – is the eigenvector with the highest eigenvalue.
5: Compress the data. The dimensionality of the principal component matrix W can be reduced
by keeping only the first m
′
eigenvectors (W
′
). The loss of information by discarding an eigen-
vector j is the fraction of the eigenvector’s energy that is
λ
j
∑
i
λ
i
, where
λ
j
is the eigenvalue of
the j-th eigenvector.
−4 −2 2 4
−2
−1
1
2
3
4
u
2
u
1
Fig. 2: PCA analysis of a two-dimensional point cloud from a combination of Gaus-
sians. The principal components derived using PCS are u
1
and u
2
, whose length is
relative to the energy contained in the components.
Data Mining Methods for Recommender Systems 9
linear data, generalizations of PCA have been proposed, such as Kernel PCA [?].
Another important assumption of PCA is that the original data set has been drawn
from a Gaussian distribution. When this assumption does not hold true, as it is the
case of multi-modal Gaussian or non-Gaussian distributions, there is no warranty
that the principal components are meaningful.
2.3.2 Singular Value Decomposition
Singular Value Decomposition [34] is a powerful technique for dimensionality re-
duction that is related to PCA. The key issue in an SVD decomposition is to find a
lower dimensional feature space where the new features represent “concepts” and
the strength of each concept in the context of the collection is computable. Be-
cause SVD allows to automatically derive semantic “concepts” in a low dimensional
space, it is the basis of latent-semantic analysis [57], a very popular technique for
text classification in Information Retrieval .
The core of the SVD algorithm lies in the followingtheorem: It is always possible
to decompose a given matrix A into A = U
λ
V
T
. Given the n × m matrix data A (n
items, m features), we can obtain an n× r matrix U (n items, r concepts), an r × r
diagonal matrix
λ
(strength of each concept), and an m× r matrix V (m features, r
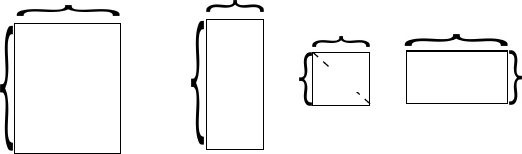
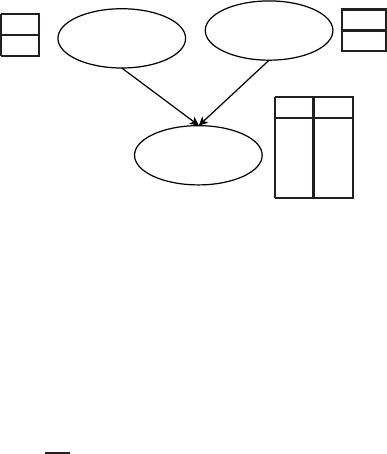
concepts). Figure 3 illustrates this idea.
A
n
m
=
U
r
(items)
(features)
(concepts)
X
r
r
X
V
m
n
(items)
(features)
r
(concepts)
λ
Fig. 3: Illustrating the basic Singular Value Decomposition Theorem: an item ×
features matrix can be decomposed into three different ones: an item × concepts, a
concept strength, and a concept × features.
The
λ
diagonalmatrix contains the singular values, which will always be positive
and sorted in decreasing order. The U matrix is interpreted as the “item-to-concept”
similarity matrix, while the V matrix is the “term-to-concept” similarity matrix.
In order to compute the SVD of a rectangular matrix A, we consider AA
T
and
A
T
A. The columns of U are the eigenvectors of AA
T
, and the columns of V are
the eigenvectors of A
T
A. The singular values on the diagonal of
λ
are the positive
square roots of the nonzero eigenvalues of both AA
T
and A
T
A. Therefore, in order
to compute the SVD of matrix A we first compute T as AA
T
and D as A
T
A and then
compute the eigenvectors and eigenvalues for T and D.

10 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
The r eigenvalues in
λ
are ordered in decreasing magnitude. Therefore, the orig-
inal matrix A can be approximated by simply truncating the eigenvalues at a given k.
The truncated SVD creates a rank-k approximation to A so that A
k
= U
k
λ
k
V
T
k
. A
k
is
the closest rank-k matrix to A. The term “closest” means that A
k
minimizes the sum
of the squares of the differences of the elements of A and A
k
. The truncated SVD is
a representation of the underlying latent structure in a reduced k-dimensional space,
which generally means that the noise in the features is reduced.
2.3.3 Dimensionality Reduction in Recommender Systems
Sparsity and the curse of dimensionality are recurring problems in Recommender
Systems. Even in the simplest setting, we are likely to have a sparse matrix with
thousands of rows and columns (i.e. users and items), most of which are zeros.
Therefore, dimensionality reduction comes in naturally. Applying dimensionality
reduction makes such a difference and its results are so directly applicable to the
computation of the predicted value, that this is now considered to be an approach to
Recommender Systems design, rather than a preprocessing technique. As a matter
of fact, the twopreferred approaches to collaborativefiltering are nowadays standard
kNN and its many variations, and dimensionality reduction via SVD [].
Earlier works, however, used PCA as a way to reduce dimensionality in a col-
laborative filtering setting. Goldberg et al. proposed an approach to use PCA in the
context of an online joke recommendation system [33]. Their system, known as
Eigentaste
2
, starts from a standard matrix of user ratings to items. They then select
their gauge set by choosing the subset of items for which all users had a rating. This
new matrix is then used to compute the global correlation matrix where a standard
2-dimensional PCA is applied.
The use of SVD as tool to improve collaborative filtering has been known for
some time. Sarwar et al. [60] describe two different ways to use SVD in this context.
First, SVD can be used to uncover latent relations between customers and products.
In order to accomplish this goal, they first fill the zeros in the user-item matrix
with the item average rating and then normalize by subtracting the user average.
This matrix is then factored using SVD and the resulting decomposition can be
used – after some trivial operations – directly to compute the predictions. The other
approach is to use the low-dimensional space resulting from the SVD to improve
neighborhood formation for later use in a kNN approach.
As described by Sarwar et al. [59], one of the big advantages of SVD is that
there are incremental algorithms to compute an approximated decomposition. This
allows to accept new users or ratings without having to recompute the model that
had been built from previously existing data. The same idea was later extended and
formalized by Brand [11] into an online SVD model. The use of incremental SVD
methods has recently become a commonly accepted approach after its success in
2
http://eigentaste.berkeley.edu

Data Mining Methods for Recommender Systems 11
the Netflix Prize
3
. The publication of Simon Funk’s simplified incremental SVD
method [31] marked an inflection point in the contest. Since its publication, several
improvements to SVD have been proposed in this same context (see Paterek’s en-
sembles of SVD methods [50] or Kurucz et al. evaluation of SVD parameters [43]).
Finally, it should be noted that different variants of Matrix Factorization (MF)
methods such as the Non-negative Matrix Factorization (NNMF) have also been
used [67]. These algorithms are, in essence, similar to SVD. The basic idea is to
decompose the ratings matrix into two matrices, one of which contains features
that describe the users and the other contains features describing the items. Matrix
Factorization methods are better than SVD at handling the missing values by in-
troducing a bias term to the model. However, this can also be handled in the SVD
preprocessing step by replacing zeroes with the item average. Note that both SVD
and MF are prone to overfitting. However, there exist MF variants, such as the Regu-
larized Kernel Matrix Factorization [], that can avoid the issue efficiently. The main
issue with MF – and SVD – methods is that it is unpractical to recompute the fac-
torization every time the matrix is updated because of computational complexity.
However, Rendle and Schmidt-Thieme [56] propose an online method that allows
to update the factorized approximation without recomputing the entire model.
3 Classification
A classifier is a mapping between a feature space and a label space, where the fea-
tures represent characteristics of the elements to classify and the labels represent the
classes. A restaurant recommender system, for example, can be implemented by a
classifier that classifies restaurants into one of two categories (good, bad) based on
a number of features that describe it (e.g., quality of food on a scale from 1 to 10,
atmosphere on a scale from 1 to 10, etc.). A particular restaurant R will be repre-
sented by a feature vector FV
r
=< fv
1
, fv
2
,, fv
n
>. In this particular example, the
classifier is binary because it produces only two labels: good or bad.
There are many types of classifiers, but in general they will either be supervised
or unsupervised.
• In supervised classification, a set of labels or categories is knownin advance (e.g.,
we know there are two types of restaurants, good and bad) and we have a set of
labeled examples which constitute a training set (we know in advance which
restaurants are good and which are bad). The task is then to learn a mapping
(boundary, or function) that can separate the instances (good from bad restau-
rants) so that if a new unseen instance (restaurant) is presented to the classifier it
can predict its category (good, bad).
• In unsupervised classification, the labels or categories are unknown in advance
and the task is to suitably (according to some criteria) organize the elements at
hand (e.g., given a list of restaurants, put them into groups considering all or
3
http://www.netflixprize.com
12 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
some of their characteristics: quality of food, price, location, etc.). Following
this example, an unsupervised learning algorithm might discover two groups of
restaurants in a list where it might turn out that one group has only French restau-
rants and the other one only American restaurants although the labels “French”
and “American” did not exist in the feature vectors. Unsupervised classification
is accomplished by means of clustering algorithms, which will be covered in
section 4.
In essence, then, classifiers try to find boundary functions to separate or group
elements into either known categories or into groups of similar elements. In this
section we describe several algorithms to learn supervised classifiers and will be
covering unsupervised classification in section
4.
3.1 Nearest Neighbors
Instance-based classifiers work by storing training records and using them to predict
the class label of unseen cases. A trivial example is the so-called rote-learner. This
classifier memorizes the entire training set and classifies only if the attributes of the
new record match one of the training examples exactly.
A more elaborate, and far more popular, instance-based classifier is the Nearest
neighbor classifier (kNN) [19]. Given a point to be classified, the kNN classifier
finds the k closest points (nearest neighbors) from the training records. It then as-
signs the class label according to the class labels of its nearest-neighbors. The un-
derlying idea is that if a record falls in a particular neighborhood where a class label
is predominant it is because the record is likely to belong to that very same class.
Given a query point q for which we want to know its class l, and a training
set X = {{x
1
,l
1
}...{x
n
}}, where x
j
is the j-th element and l
j
is its class label, the
k-nearest neighbors will find a subset Y = {{y
1
,l
1
}...{y
k
}} such that Y ∈ X and
∑
k
1
d(q,y
k
) is minimal. Y contains the k points in X which are closest to the query
point q. Then, the class label of q is l = f({l
1
...l
k
}).
The distance measure d is usually the Euclidian distance. However, other mea-
sures, such as the ones reviewed in
2.1, can be applied depending on the data. In
order to prevent the distance measure from being dominated by some of the at-
tributes, it is common-practice to scale attributes. Furthermore, and in order to avoid
counter-intuitive results, we sometimes normalize vectors to unit length.
There are different candidates for the function f by which the new class label is
assigned. The most widely used is the majority vote rule with ties broken at random.
With majority vote, the query point q is assigned to the most common label of its
nearest neighbors. A variation of the majority vote is to weight the votes according
to the distance between the training points y
k
and the query point q; the vote of the
closest neighbor counts more than the vote of the furthest – this is one of preferred
approach when using kNN in a collaborative filtering setting. Another strategy is
to use the consensus rule. Unlike the majority vote rule, consensus only assigns the
label if and only if all k neighbors have the same class label. This technique is useful
Data Mining Methods for Recommender Systems 13
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
items of cluster 1
items of cluster 2
item to classify
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
items of cluster 1
items of cluster 2
item to classify
?
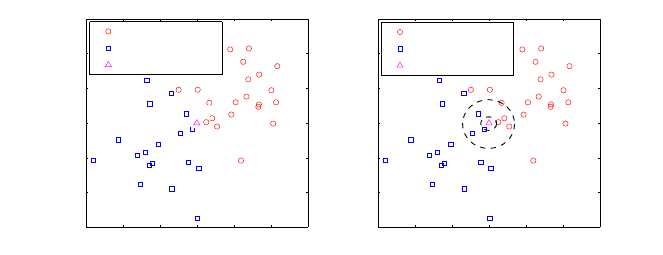
Fig. 4: Example of k-Nearest Neighbors. The left subfigure shows the training points
with two class labels (circles and squares) and the query point (as a triangle). The
right sub-figure illustrates closest neighborhood for k = 1 and k = 7. The query
point would be classified as square for k = 1, and as a circle for k = 5 according to
the simple majority vote rule. Note that the query points was just on the boundary
between the two clusters.
to discriminate the classification in terms of certainty, however, many query points
might remain unclassified due to the strictiveness of this criterium.
Perhaps the most challenging issue in kNN is how to choose the value of k. If k
is too small, the classifier will be sensitive to noise points. But if k is too large, the
neighborhood might include too many points from other classes. The right plot in
Fig.
4 shows how different k yields different class label for the query point, if k = 1
the class label would be circle whereas k = 7 classifies it as square. Note that the
query point from the example is on the boundary of two cluster, and therefore, it is
difficult to classify.
kNN classifiers are amongst the simplest of all machine learning algorithms.
Since kNN does not build models explicitly it is considered a lazy learner. Unlike
eager learners such as decision trees or rule-based systems, kNN classifiers leave
many decisions to the classification step. Therefore, classifying unknown records is
relatively expensive.
3.1.1 Nearest Neighbors in Recommender Systems
Nearest Neighbor is one of the most common approaches to collaborative filter-
ing (and therefore to designing a recommender systems). As a matter of fact, any
overviewon Recommender Systems – such as the one by Adomavicius and Tuzhilin
[1] – will include an introduction to the use of nearest neighbors in this context.
One of the advantages of this classifier is that it is conceptually very much related
to the idea of collaborative filtering: Finding like-minded users (or similar items) is
essentially equivalent to finding neighbors for a given user or an item.
14 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
The other advantage is that, being the kNN classifier a lazy learner, it does not
require to learn and maintain a given model. Therefore, in principle, the system can
adapt to rapid changes in the user ratings matrix. Unfortunately, this comes at the
cost of recomputing the neighborhoods and therefore the similarity matrix.
The kNN approach, although simple and intuitive, has shown good accuracy re-
sults and is very amenable to improvements. As a matter of fact, its supremacy as
the de facto standard for collaborative filtering recommendation has only been chal-
lenged recently by approaches based on dimensionality reduction such as the ones
reviewed in Section
2.3.
The general kNN approach to collaborative filtering has experienced improve-
ments in several directions. For instance, in the context of the Netflix Prize, Bell
and Koren [7] propose a method to remove global effects such as the fact that some
items may attract users that consistently rate lower. They also propose an optimiza-
tion method for computing interpolating weights once the neighborhood is created.
3.2 Decision Trees
Decision trees [55] are classifiers on a target attribute (or class) in the form of a
tree structure. The observations (or items) to classify are composed of attributes and
their target value. The nodes of the tree can be: a) decision nodes, in these nodes a
single attribute-value is tested to determine to which branch of the subtree applies.
Or b) leaf nodes which indicate the value of the target attribute.
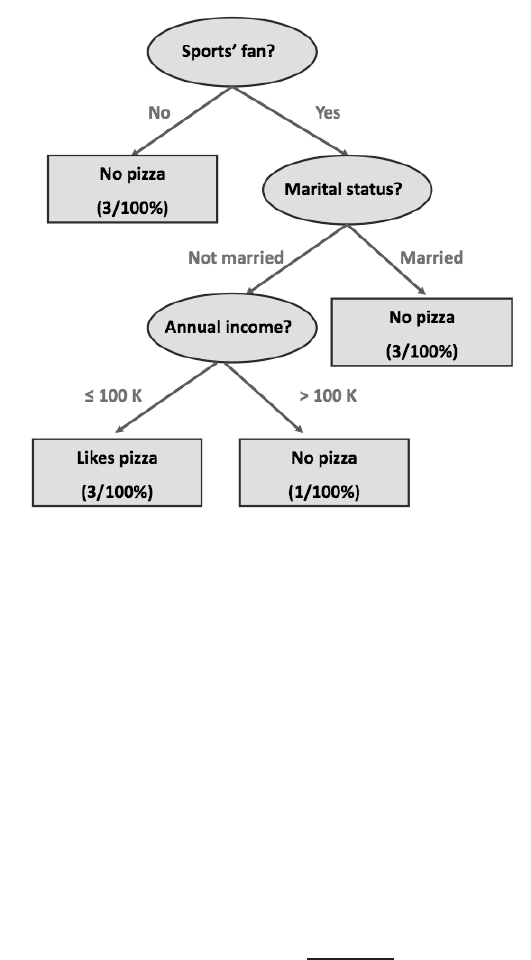
Figure
5 is a decision tree of the data contained in Table 1. In this toy example,
the goal is to classify potential pizza-lovers as a function of three attributes (marital
status, annual income and interest in sports). The tree will then be used to predict
the risk of future borrowers based on historic data.
sub:similarity
Sports’ fan Marital Status Annual income Likes Pizza
Yes Divorced 90K Yes
No Single 125K No
Yes Married 100K No
Yes Married 60K No
Yes Married 75K No
Yes Single 105K No
Yes Single 85K Yes
Yes Single 90K Yes
No Divorced 220K No
No Married 120K No
Table 1: Attributes and target attribute from the observations
There are many algorithms for decision tree induction: Hunts Algorithm, CART,
ID3, C4.5, SLIQ, SPRINT to mention the most common. We briefly describe Hunt’s
Data Mining Methods for Recommender Systems 15
Fig. 5: Example of a Decision Tree for the data summarized in Table 1
Algorithm – used in the toy example – for it is one of the earliest and easiest to
understand. The recursive Hunt algorithm is described in Listing
2.
The algorithm relies on the test condition applied to a given attribute that dis-
criminates the observations by their target values. Once the partition induced by the
test condition has been found, the algorithm is recursively repeated until a partition
is empty or all the observations have the same target value. In Fig.
5 there are three
test conditions, one for each attributed in the data. The first test condition was to
ask for sport’s supporters since there is no observation of a non sports’s fan liking
pizza. Applying the condition will create the split of the data in two new nodes: a)
non sports’ fans with three instances and b) sports’ fans with seven instances. Why
was sports chosen to do the split instead of another attribute? Because the partition
yielded by sports maximized the information gain, defined as follows,
∆
i
= I(parent) −
k
i
∑
j=1
N(v
j
)I(v
j
)
N
(9)
where k
i
are values of the attribute i, N is the number of observations, v
j
is the
j-th partition of the observations according to the values of attribute i. Finally, I
is a function that measures node impurity. There are different measures of impu-
16 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
Algorithm 2 Hunt algorithm
1: D
t
= {(X
i1
,..., X
ip
,Y
i
),∀i ∈ N}
2: (the N observations to classify in D
t
,Y
i
is the target attribute of the i-th instance or observation)
3: c (the current node)
4:
5: procedure Hunt(D
t
, c)
6:
7: if same value for all Y
i
in D
t
then
8: mark c as leaf node with value Y
i
9: else
10: use test condition to split D
t
in Q different sets of observations D
t1
..D
tq
11: according the values of an attribute j X
ij
12: for i ∈ Q do
13: Hunt(D
t
i,i)
14: end for
15: end if
16:
17: end procedure
rity: Gini Index, Entropy and misclassification error are the most common in the
literature. We used misclassification to build up the example depicted in Fig. 5. We
computed the information
∆
for each attribute and selected sports since it maxi-
mized the information gain. Then, the original observations are split into two new
nodes and the process is repeated.
Note that the test condition selection process uses a greedy hill-climbing strategy.
Decision trees can, therefore, get stuck in a local optimal classification. The test
condition is also sensitive to the attribute type (i.e. nominal, ordinal, continuous...)
and whether we decide to do a 2-way split or a multi-way split. However, these
two issues are not uncorrelated. For instance, if we base our partition on nominal
attributes we will favor a multi-way split using as many partitions as distinct values.
We have different ways to handle splitting conditions based on continuousattributes.
We can discretize any continuous attribute to form an ordinal attribute following
either a static or dynamic approach. In the static, we discretize the attribute once
at the beginning. In the dynamic, ranges can be found by equal interval bucketing,
equal frequency bucketing, or clustering.
We already mentioned that the decision tree stops once all observations belong to
the same class (or the same range in the case of continuous attributes). This implies
that the impurity of the leaf nodes is zero. For practical reasons, however, most
decision trees implementations use pruning by which a node is no further split if
its impurity measure or the number of observations in the node are below a certain
threshold. This early termination criteria are used to improve the efficiency of the
algorithm. Early termination avoids too fine-grained splits that might be irrelevant
in the prediction stage or could be over-fitting to the training data.
The main advantages of building a classifier using a decision tree is that it is
inexpensive to construct and it is extremely fast at classifying unknown instances.
Data Mining Methods for Recommender Systems 17
Another appreciated aspect of decision tree is that they can be used to produce a set
of rules that are easy to interpret (see section
3.3) while maintaining an accuracy
comparable to other basic classification techniques.
3.2.1 Decision Trees in Recommender Systems
Decision trees may be used in a model-based approach for a recommender system.
One possibility is to use content features to build a decision tree that models all the
variables involved in the user preferences. Bouza et al. [9] use this idea to construct
a Decision Tree using semantic information available for the items. The tree is built
after the user has rated only two items. The features for each of the items are used to
build a model that explains the user ratings. They use the information gain of every
feature as the splitting criteria. It should be noted that although this approach is
interesting from a theoretical perspective, the precision they report on their system
is worse than that of recommending the average rating.
As it could be expected, it is very difficult and unpractical to build a decision
tree that tries to explain all the variables involved in the decision making process.
Decision trees, however, may also be used in order to model a particular part of
the system. Cho et al. [14], for instance, present a Recommender System for online
purchases that combines the use of Association Rules (see Section
5) and Decision
Trees. The Decision Tree is used as a filter to select which users should be targeted
with recommendations. In order to build the model they create a candidate user set
by selecting those users that have chosen products from a given category during
a given time frame. In their case, the dependent variable for building the decision
tree is chosen as whether the customer is likely to buy new products in that same
category.
3.3 Ruled-based Classifiers
Rule-based classifiers classify data by using a collection of “if .. . then .. .” rules.
The rule antecedent or condition is an expression made of attribute conjunctions.
The rule consequent is a positive or negative classification.
We say that a rule r covers a given instance x if the attributes of the instance
satisfy the rule condition. We define the coverage of a rule as the fraction of records
that satisfy its antecedent. On the other hand, we define its accuracy as the fraction
of records that satisfy both the antecedent and the consequent. We say that a clas-
sifier contains mutually exclusive rules if the rules are independent of each other –
i.e. every record is covered by at most one rule. Finally we say that the classifier has
exhaustive rules if they account for every possible combination of attribute values
–i.e. each record is covered by at least one rule.
In order to build a rule-based classifier we can follow a direct method to extract
rules directly from data. Examples of such methods are RIPPER, or CN2. On the
18 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
other hand, it is common to follow an indirect method and extract rules from other
classification models such as decision trees or neural networks.
For instance the rules derived from applying a decision tree
5 to the data of Table
1 would be:
1. IF NOT Sports’ fan THEN NOT Pizza (coverage 30%, accuracy 100%)
2. IF Sports’ fan AND Married THEN NOT Pizza (coverage30%, accuracy 100%)
3. IF Sports’ fan AND NOT Married THEN Pizza (coverage 40%, accuracy 75%)
Note that we excluded the annual income attribute for the sake of illustrating the
coverage and accuracy. The advantages of rule-based classifiers are that they are
extremely expressive since they are symbolic and operate with the attributes of the
data without any transformation. Rule-based classifiers, and by extension decision
trees, are easy to interpret, easy to generate and they can classify new instances
efficiently.
3.3.1 Rule-based Classifiers in Recommender Systems
In a similar way to Decision Tress, it is very difficult to build a complete recom-
mender model based on rules. As a matter of fact, this method is not very popular
in the context of recommender systems because deriving a rule-based system means
that we either have some explicit prior knowledge of the decision making process
or that we derive the rules from another model such a decision tree. However a rule-
based dystem can be used to improve the performance of a recommender system by
injecting partial domain knowledge or business rules.
Anderson et al. [3], for instance, implemented a collaborative filtering music
recommender system that improvesits performanceby applying a rule-based system
to the results of the collaborativefiltering process. If a user rates an album by a given
artist high, for instance, predicted ratings for all other albums by this artist will be
increased.
Gutta et al. [26] implemented a rule-based recommender system for TV content.
In order to do, so they first derived a C4.5 Decision Tree that is then decomposed
into rules for classifying the programs.
Basu et al. [5] followed an inductive approach using the Ripper [16] system to
learn rules from data. They report slightly better results when using hybrid con-
tent and collaborative data to learn rules than when following a pure collaborative
filtering approach.
3.4 Bayesian Classifiers
A Bayes classifier [30] is a probabilistic framework for solving classification prob-
lems. It is based on the definition of conditional probability and the Bayes theorem.
The Bayesian school of statistics uses probability to represent uncertainty about the

Data Mining Methods for Recommender Systems 19
relationships learned from the data. In addition, the concept of priors is very im-
portant as they represent our expectations or prior knowledge about what the true
relationship might be. In particular, the probability of a model given the data (pos-
terior) is proportional to the product of the likelihood times the prior probability
(or prior). The likelihood component includes the effect of the data while the prior
specifies the belief in the model before the data was observed.
Bayesian classifiers make use of Bayes’ theorem, that relates all the previous
concpts, and is given by:
P(M|D) =
P(D|M)P(M)
P(D)
(10)
where M is a model (or hypothesis) and D is the data. P(M) is the prior probability
of M, i.e. the probability that M is correct before the data D is observed; P(D|M)
is the conditional probability of seeing data D given that model M is true. This is
called the likelihood of the data; P(D) is the marginal probability of the data and
P(M|D) is the posterior probability, i.e. the probability that model M is true, given
the data.
If we assume an exhaustive set of mutually exclusive models M
i
, we obtain:
P(D) =
∑
i
P(D,M
i
) =
∑
i
P(D|M
i
)P(M
i
) (11)
Note that P(D) in Equation
10 is a normalizing constant that only depends on the
data and in most cases does not need to be computed explicitly. As a result, Bayes’
theorem is typically simplified to P(M|D) ∝ P(D|M)P(M).
Bayesian classifiers consider each attribute and class label as (continuous or dis-
crete) random variables. Given a record with N attributes (A
1
,A
2
,...,A
N
), the goal is
to predict class C
k
by finding the value ofC
k
that maximizes the posterior probability
of the class given the data P(C
k
|A
1
,A
2
,...,A
N
). Applying Bayes’ theorem,
P(C
k
|A
1
,A
2
,...,A
N
) ∝ P(A
1
,A
2
,...,A
N
|C
k
)P(C
k
) (12)
A particular but very common Bayesian classifier is the Naive Bayes Classifier.
In order to estimate the conditional probability, P(A
1
,A
2
,...,A
N
|C
k
), a Naive Bayes
Classifier assumes the probabilistic independence of the attributes – i.e. the presence
or absence of a particular attribute is unrelated to the presence or absence of any
other. This assumption leads to
P(A
1
,A
2
,...,A
N
|C
k
) = P(A
1
|C
k
)P(A
2
|C
k
)...P(A
N
|C
k
) (13)
If conditional probabilities are zero, then the entire expression becomes zero so
the Naive Bayes Classifier will not be able to classify the instance. In this case, we
can use the m-estimate approach for estimating conditional probabilities:
P(A
i
|C
k
) =
n
c
+ mp
n+ m
(14)
20 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
Watches
Sport
(S)
Married
(M)
Likes
Pizza
(P)
P(S)
0.6
P(M)
0.2
S M P(P)
T T 0.8
T F 0.9
F T 0.3
F F 0.4
Fig. 6: Example of a Bayesian Belief Network
where n is the number of training instances in class C, n
c
is the number of training
instances belonging to class C with attribute A
i
, p is the prior estimation of the
probability (usually set to one over the number of values of the attribute we are
considering), and m is a parameter known as the equivalent sample size.
Another issue with Bayesian classifiers is that the computation of each P(A
i
|C
k
)
depends on the nature of the attribute that we are dealing with. In the case of discrete
attributes, P(A
i
|C
k
) =
|A
k
i
|
Nc
, where |A
k
i
| is number of instances that have attribute A
i
and belong to class C
k
. Continuous attributes are typically discretized.
The main benefits of Naive Bayes classifiers are that they are robust to isolated
noise points and irrelevant attributes, and they handle missing values by ignoring
the instance during probability estimate calculations.
However, the independence assumption may not hold for some attributes as they
might be correlated. In this case, the usual approach is to use the so-called Bayesian
Belief Networks (BBN) (or Bayesian Networks, for short). BBN’s use an acyclic
graph to encode the dependence between attributes and a probability table that as-
sociates each node to its immediate parents (see Fig.
6). If a node A does not have
any parent, the table contains only prior probability P(A); if the node has only one
parent B, the table contains the conditional probability P(A|B); and if the node has
multiple parents, the table contains the conditional probability P(A|B
1
,B
2
,...,B
3
).
BBN’s provide a way to capture prior knowledge in a domain using a graphical
model. And, although constructing the model is non-trivial, once the structure of
the network is determined it is quite easy to add a new variable. In a similar way
to Naive Bayes classifiers, BBN’s handle incomplete data well and they are quite
robust to model overfitting.
3.4.1 Bayesian Classifiers in Recommender Systems
Bayesian classifiers are particularly popular for model-based recommendersystems.
They are often used to derive a model for content-based recommender systems.
However, they have also been used in a collaborative filtering setting.
Data Mining Methods for Recommender Systems 21
Ghani and Fano [32], for instance, use a Naive Bayes classifier to implement a
content-based recommender system. The use of this model allows for recommend-
ing products from unrelated categories in the context of a department store.
Miyahara and Pazzani [48] implement a recommender system based on a Naive
Bayes classifier. In order to do so, they define two classes: like and don’t like. In this
context they propose two ways of using the Naive Bayesian Classifier: The Trans-
formed Data Model assumes that all features are completely independent, and fea-
ture selection is implemented as a preprocessing step. On the other hand, the Sparse
Data Model assumes that only known features are informative for classification.
Furthermore, it only makes use of data which both users rated in common when
estimating probabilities. Experiments show both models to perform better than a
correlation-based collaborative filtering.
Pronk et al. [52] use a Bayesian Naive Classifier as the base for incorporating
user control and improving performance, especially in cold-start situations. In order
to do so they propose to maintain two profiles for each user: one learned from the
rating history, and the other explicitly created by the user. The blending of both
classifiers can be controlled in such a way that the user-defined profile is favored
at early stages, when there is not too much rating history, and the learned classifier
takes over at later stages.
In the previous section we mentioned that Gutta et al. [26] implemented a rule-
based approach in a TV content recommender system. Another of the approaches
they tested was a Bayesian classifier. They define a two-class classifier, where the
classes are watched/not watched. The user profile is then a collection of attributes
together with the number of times they occur in positive and negative examples.
This is used to compute prior probabilities that a show belongs to a particular class
and the conditional probability that a given feature will be present if a show is either
positive or negative. It must be noted that features are, in this case, related to both
content –i.e. genre – and contexts –i.e. time of the day. The posteriori probabilities
for a new show are then computed from these.
Breese et al. [12] implement a Bayesian Network where each node corresponds
to each item. The states correspond to each possible vote value. In the network, each
item will have a set of parent items that are its best predictors. The conditional prob-
ability tables are represented by decision trees. The authors report better results for
this model than for several nearest-neighbors implementations over several datasets.
Hierarchical Bayesian Networks have also been used in several settings as a way
to add domain-knowledge for information filtering [71]. One of the issues with hier-
archical Bayesian networks, however, is that it is very expensive to learn and update
the model when there are many users in it. Zhang and Koren [72] propose a varia-
tion over the standard Expectation-Maximization (EM) model in order to speed up
this process in the scenario of a content-based recommender system.
22 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
3.5 Artificial Neural Networks
The Artificial Neural Network (ANN) model [74] is an assembly of inter-connected
nodes and weighted links that is inspired in the architecture of the biological brain.
Nodes in an ANN are called neurons as an analogy with biological neurons. These
simple functional units are composed into networks that have the ability to learn a
classification problem after they are trained with sufficient data.
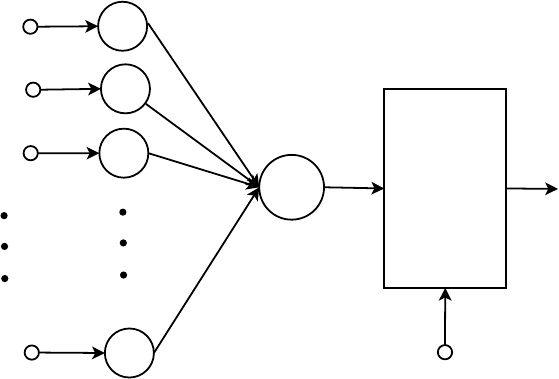
The simplest case of an ANN is the perceptron model, illustrated in figure
7.
Input Signals
Synaptic Weights
Summing Junction
Activation
Function
Output
Threshold
w
k0
w
k1
w
k2
w
kp
x
0
x
1
x
2
x
p
∑
φ
(•)
θ
k
v
k
Fig. 7: Perceptron model
If we particularize the activation function
φ
to be the simple Threshold Function
, the output is obtained by summing up each of its input value according to the
weights of its links and comparing its output against some threshold
θ
k
. The output
function can be expressed using Eq.
15. The perceptron model is a linear classifier
that has a simple and efficient learning algorithm summarized in Listing 3.
y
k
=
(
1, if
∑
x
i
w
ki
≥
θ
k
0, if
∑
x
i
w
ki
<
θ
k
(15)
Besides the simple Threshold Function used in the Perceptron model, there are
several other common choices for the activation function such as sigmoid, tanh, or
step functions.
Using neurons as atomic functional units, there are many possible architectures
to put them together in a network. But, by far, the most common approach is to use
Data Mining Methods for Recommender Systems 23
Algorithm 3 Perceptron Learning algorithm
1: Let D = (x
i
,y
i
)|i = 1, 2,·· · , N be the set of training examples
2: Initialize the weight vector with random values, w
0
3: repeat
4: for each training example (x
i
,y
i
) ∈ D do do
5: Compute the predicted output ˆy
k
i
6: for each weight w
j
do
7: Update the weight w
k+1
j
= w
k
j
+
λ
(y
i
− ˆy
k
i
)x
ij
8: end for
9: end for
10: until stopping condition is met
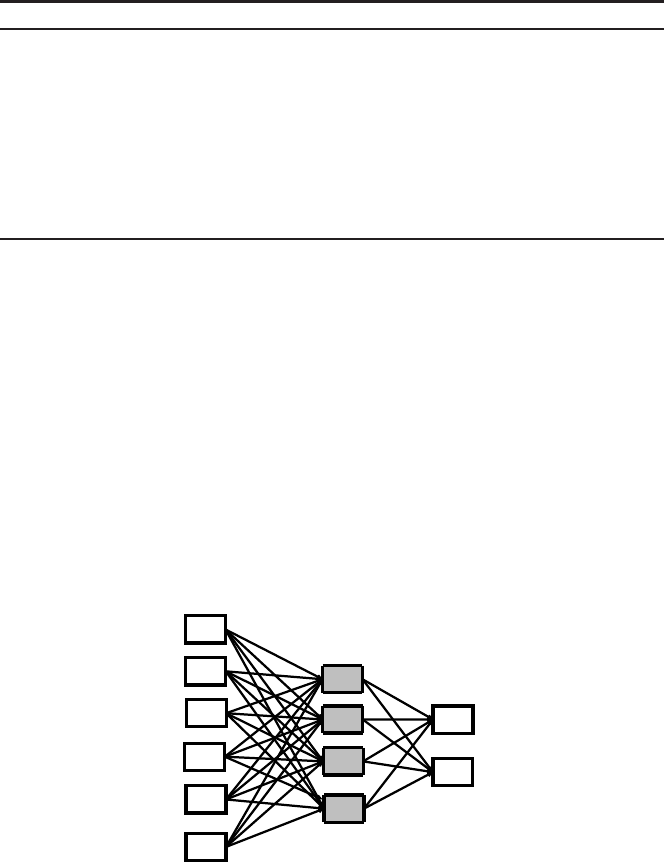
the feed-forward ANN (see figure 8). In this case, signals are strictly progated in one
way: from input to output.
An ANN can have any number of layers. The simple feedforward network in fig-
ure
8 has three layers. On the other hand, the perceptron in figure 7 is a single-layer
feed-forward ANN. Layers in an ANN are classified into three types: input, hidden,
and output. Units in the input layer respond to data that is fed into the network.
Hidden units receive the weighted output from the input units. And the output units
respond to the weighted output from the hidden units and generate the final output
of the network.
Feedforward
Neural Net
Input Layer
Output Layer
Hidden Layer
Fig. 8: Example of a simple feed-forward ANN with one hidden layer
The learning algorithm in listing
3 is only valid for the simple Perceptron model.
There exist supervised, unsupervised, and reinforcement learning algorithms for the
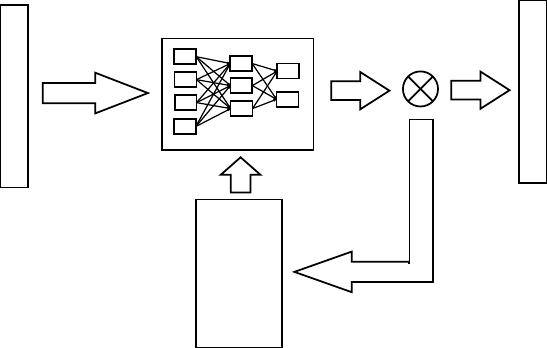
general case of multilayer networks. The generic algorithm for learning ANN in a
supervised way, for instance, is summarized in figure
9. The most common concrete
24 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
algorithm for learning ANN’s is the so-called back-propagation algorithm, based
on the computation of the error derivative of the weights. However, it is beyond the
scope of this chapter to go into the details of this algorithm.
Input Features
Neural
Net
Supervised
Learning
Algorithm
Target Features
-
+
Fig. 9: Supervised learning process for learning an ANN
The main advantages of ANN are that – depending on the activation function
– they can perform non-linear classification tasks, and that, due to their parallel
nature, they can be efficient and even operate if part of the network fails. The main
disadvantage is that it is hard to come up with the ideal network topology for a
given problem and once the topology is decided this will act as a lower bound for
the classification error. ANN’s belong to the class of sub-symbolic classifiers, which
means that they provide no semantics for inferring knowledge – i.e. they promote a
kind of black-box approach.
3.5.1 Artificial Neural Networks in Recommender Systems
ANN’s can be used in a similar way as Bayesian Networks to construct model-based
recommender systems. However, there is no conclusive study to whether ANN in-
troduce any performance gain. As a matter of fact, Pazzani and Billsus [51] did
a comprehensive experimental study on the use of several machine learning algo-
rithms for web site recommendation. Their main goal was to compare the simple
naive Bayesian Classifier with computationally more expensive alternatives such as
Decision Trees and Neural Networks. Their experimental results show that Deci-
sion Trees perform significantly worse. On the other hand ANN and the Bayesian
Data Mining Methods for Recommender Systems 25
classifier perform similarly. They conclude that there does not seem to be a need for
nonlinear classifiers such as the ANN.
ANN can be used to combine (or hybridize) the input from several recommen-
dation modules or data sources. Hsu et al. [27], for instance, build a TV recom-
mender by importing data from four different sources: user profiles and stereotypes;
viewing communities; program metadata; and viewing context. They use the back-
propagation algorithm to train a three-layered neural network.
Berka et al. [28] used ANN to build an URL recommender system for web navi-
gation. They implemented a content-independent system based exclusively on trails
– i.e. associating pairs of domain names with the number of people who traversed
them. In order to do so they used feed-forward Multilayer Perceptrons trained with
the Backpropagation algorithm.
Christakou and Stafylopatis [15] build a hybrid content-based collaborative fil-
tering recommender system. The content-based recommender is implemented using
three neural networks per user, each of them corresponding to one of the following
features: “kinds”, “stars”, and “synopsis”. They trained the ANN using the Resilient
Backpropagation method.
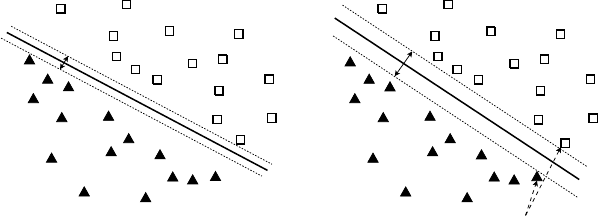
3.6 Support Vector Machines
The goal of a Support Vector Machine (SVM) classifier [20] is to find a linear hy-
perplane (decision boundary) that separates the data in such a way that the margin is
maximized. For instance, if we look at a two class separation problem in two dimen-
sions like the one illustrated in figure
10, we can easily observe that there are many
possible boundarylines to separate the two classes. Each boundary has an associated
margin. The rationale behind SVM’s is that if we choose the one that maximizes the
margin we are less likely to missclassify unknown items in the future.
Large Margin
Small Margin
Support Vectors
w• x+ b = 0
w• x+ b = 1
w• x+ b = −1
Fig. 10: Different boundary decisions are possible to separate two classes in two
dimensions. Each boundary has an associated margin.

26 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
A linear separation between two classes is accomplished through the following
function:
w• x+ b = 0 (16)
We define a function that can classify items of being of class +1 or -1 as long
as they are separated by some minimum distance from the class separation function
previously defined. The function is given by Eq. 17
f(x) =
(
1, if w• x+ b ≥ 1
−1, if w• x+ b ≤ −1
(17)
Margin =
2
kwk
2
(18)
Following the main rationale for SVM’s, we would like to maximize the margin
between the two classes, given by equation
18. This is in fact equivalent to mini-
mizing the inverse value L(w) =
kwk
2
2
but subjected to the constraints given by f(x).
This is a constrained optimization problem and there are numerical approaches to
solve it (e.g., quadratic programming).
If the items are not linearly separable we can decide to turn the svm into a soft
margin classifier by introducing a slack variable. In this case the formula to mini-
mize is given by equation
19 subject to the new definition of f(x) in equation 20.
Note that the constant C in equation 19 allows to define the cost of a constraint
violation.
L(w) =
kwk
2
2
+C
N
∑
i=1
ε
(19)
f(x) =
(
1, if w• x+ b ≥ 1−
ε
−1, if w• x+ b ≤ −1+
ε
(20)
On the other hand, if the decision boundary is not linear we need to transform
data into a higher dimensional space (see figure
11). This is accomplished thanks
to a mathematical transformation known as the kernel trick. The basic idea is to re-
place the dot products in equation 17 by a kernel function. There are many different
possible choices for the kernel function such as Polynomial or Sigmoid. But by far
the most common kernel function are the family of Radial Basis Function (RBF).
The formulation for a Gaussian RBF, for instance, is given by Eq.
21.
k(x,x
′
) = exp(−
γ
||x− x
′
||
2
) (21)
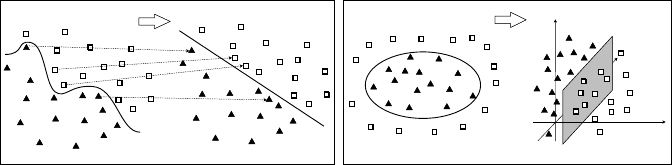
Data Mining Methods for Recommender Systems 27
Input Space
Transformed Feature Space
(a)
Input Space
Transformed Feature Space
(b)
Fig. 11: Mapping input data into a different feature space where problem will be
linearly separable
3.6.1 Support Vector Machines in Recommender Systems
Support Vector Machines have recently gained popularity for their performance and
efficiency in many settings. SVM’s have also shown promising recent results in
recommender systems.
Kang and Yoo [42], for instance, report on an experimental study that aims at se-
lecting the best preprocessing technique for predicting missing values for an SVM-
based recommender system. In particular,they use SVD and Support Vector Regres-
sion. The Support Vector Machine recommender system is built by first binarizing
the 80 levels of available user preference data. They experiment with several settings
and report best results for a threshold of 32 – i.e. a value of 32 and less is classified
as prefer and a higher value as do not prefer. The user id is used as the class label
and the positive and negative values are expressed as preference values 1 and 2.
Xu and Araki [69] used SVM to build a TV program recommender system. They
use information from the Electronic Program Guide (EPG) as features. But in order
to reduce features they removed words with lowest frequencies. Furthermore, and
in order to evaluate different approaches, they used both the Boolean and the Term
frequency - inverse document frequency (TFIDF) weighting schemes for features.
In the former, 0 and 1 are used to represent absence or presence of a term on the
content. In the latter, this is turned into the TFIDF numerical value.
Xia et al. [68] present different approaches to using SVM’s for recommendersys-
tems in a collaborative filtering setting. They explore the use of Smoothing Support
Vector Machines (SSVM). They also introduce a SSVM-based heuristic (SSVMBH)
to iteratively estimate missing elements in the user-item matrix. They compute pre-
dictions by creating a classifier for each user. Their experimental results report best
results for the SSVMBH as compared to both SSVM’s and traditional user-based
and item-based collaborative filtering.
Oku et al. [24] propose the use of Context-Aware Vector Machines (C-SVM)
for context-aware recommender systems. They compare the use of standard SVM,
C-SVM and an extension that uses collaborative filtering as well as C-SVM. Their
28 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
results show the effectiveness of the context-aware methods for restaurant recom-
mendations.
3.7 Ensembles of Classifiers
The basic idea behind the use of ensembles of classifiers is to construct a set of
classifiers from the training data and predict class label of previously unseen records
by aggregating their predictions.
Ensembles of classifiers work whenever we can assume that the classifiers are
independent. In this case we can ensure that the ensemble will produce results that
are in the worst case as bad as the worst classifier in the ensemble. Therefore, com-
bining classifiers of a similar classification error will only improve results.
In order to generate ensembles, several approaches are possible. The two most
common techniques are Bagging and Boosting. In Bagging, we perform sampling
with replacement, building the classifier on each bootstrap sample. Therefore each
sample has probability (11/n)n of being selected. In Boosting we use an iterative
procedure to adaptively change distribution of training data by focusing more on
previously misclassified records. Initially, all records are assigned equal weights.
But, unlike bagging, weights may change at the end of each boosting round: Records
that are wrongly classified will have their weights increased while records that are
classified correctly will have their weights decreased. An example of boosting is the
AdaBoost algorithm.
3.7.1 Ensembles of Classifiers in Recommender Systems
The use of ensembles of classifiers is common practice in the recommender sys-
tems field. As a matter of fact, any hybridation technique [13] can be considered an
ensemble as it combines in one way or another several classifiers.
Experimental results show that ensembles can produce better results than any
classifier in isolation. Bell et al. [8], for instance, used a combination of 107 differ-
ent methods in their progress prize winning solution to the Netflix challenge. They
state that their findings show that it pays off more to find substantially different ap-
proaches rather than focusing on refining a particular technique. This is related to
the property we highlighted before: if classifiers are uncorrelated, their combination
can only improve results. In order to blend the results from the ensembles they use
a linear regression approach. In order to derive weights for each classifier, they par-
tition the test dataset into 15 different bins and derive unique coefficients for each
of the bins.
Data Mining Methods for Recommender Systems 29
3.8 Evaluating Classifiers
Learning algorithms and classifiers can be evaluated by multiple criteria. This in-
cludes how accurately they perform the classification, their computational complex-
ity during training , complexity during classification, their sensitivity to noisy data,
their scalability, and so on. In this section we will focus only on classification per-
formance. In order to evaluate a model we usually take into account the following
measures: True Positives (TP): number of instances classified as belonging to class
A that truly belong to class A; True Negatives (TN): number of instances classified
as not belonging to class A and that in fact do not belong to class A; False Positives
(FP): number of instances classified as class A but that do not belong to class A;
False Negatives (FN): instances not classified as belonging to class v but that in
fact do belong to class A.
The most commonly used measure for model performance is its Accuracy defined
as the ratio between the instances that have been correctly classified (as belonging
or not to the given class) and the total number of instances.
Accuracy = (TP+ TN)/(TP+ TN + FP+ FN) (22)
However, accuracy might be misleading in many cases. Imagine a 2-class prob-
lem in which there are 99,900 samples of class A and 100 of class B. If a classifier
simply predicts everything to be of class A, the computed accuracy would be of
99.9%. However, the model performance is questionable because it will never de-
tect any class B examples.
One way to improve this evaluation is to define the cost matrix where we declare
the cost of misclassifying class B examples as being of class A. In real world appli-
cations different types of errors may indeed have very different costs. For example,
if the 100 samples above correspond to defective airplane parts in an assembly line,
incorrectly rejecting a non-defective part (one of the 99,900 samples) has a negli-
gible cost compared to the cost of mistakenly classifying a defective part as a good
part.
Other common measures of model performance, particularly in Information Re-
trieval, are Precision and Recall.
P = TP/(TP + FP) (23)
R = TP/(TP+ FN) (24)
Precision is a measure of how many errors we make in classifying samples as
being of class A. Recall measures how good we are in not leaving out samples that
should have been classified as belonging to the class. Note that these two measures
are misleading when used in isolation in most cases. We could build a classifier
of perfect precision by not classifying any sample as being of class A (therefore
obtaining 0 TP but also 0 FP). Conversely, we could build a classifier of perfect
recall by classifying all samples as belonging to class A.
30 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
As a matter of fact, there is a measure, called the F
1
-measure that combines both
Precision and Recall into a single measure as:
F
1
=
2RP
R+ P
=
2TP
2TP+ FN + FP
(25)
Additional factors that impact performance include the class distribution and the
size of the training and test sets. In order to address changes due to training sampling
size, we can construct the so-called Learning Curve, which shows how accuracy
changes with varying training sample size. This requires to decide on a sampling
strategy in order to create the curve. These sampling strategies were reviewed in
section
2.2
Sometimes we would like to compare several competing models rather than es-
timate their performance independently. In order to do so we use a technique de-
veloped in the 1950s for analysis of noisy signals: the Receiver Operating Charac-
teristic (ROC) Curve. A ROC curve characterizes the relation between positive hits
and false alarms. The performance of each classifier is represented as a point on the
curve (see Fig.
12).
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
True Positive Rate
False Positive Rate
Model 1
Model 2
Fig. 12: Example of ROC Curve. Model 1 performs better for low False Positive
Rates while Model 2 is fairly consistent throughout and outperforms Model 1 for
False Positive Rates higher than 0.25
Data Mining Methods for Recommender Systems 31
We plot the relation between TP and FP on a two-dimensional plot. Any point
located at x > y is classified as positive. Some points of interest in a ROC curve are
(TP,FP) = (0, 0): declare everything to be negative class; (1,1): declare everything
to be positive class; (1,0): ideal. The diagonal line means random guessing and
below the diagonal line the prediction is opposite of the true class.
3.8.1 Evaluation of Classifiers in Recommender Systems
The most commonly accepted evaluation measure for recommender systems is the
Mean Average Error (MAE) or Root Mean Squared Error (RMSE) of the predicted
interest (or rating) and the measured one. These measures measure accuracy with-
out any assumption on the purpose of the recommender system. However, as Mc-
Nee et al. point out [47], there is much more than accuracy to deciding whether
an item should be recommended. Herlocker et al. [38] provide a comprehensive re-
view of algorithmic evaluation approaches to recommender systems. They suggest
that some measures could potentially be more appropriate for some tasks. However,
they are not able to validate the measures when evaluating the different approaches
empirically on a class of recommendation algorithms and a single set of data.
A step forward is to consider that the purpose of a “real” recommender system
is to produce a top-N list of recommendations and evaluate recommender systems
depending on how well they can classify items as being recommendable. Ziegler et
al. show [73] that evaluating recommender algorithms through top-N lists measures
still does not map directly to the user’s utility function. However, it does address
some of the limitations of the more commonly accepted accuracy measures, such as
MAE.
If we look at our recommendation as a classification problem, we can make use
of well-known measures for classifier evaluation such as precision and recall. Basu
et al. [6], for instance, use these measures by analyzing which of the items predicted
in the top quartile of the rating scale were actually evaluated in the top quartile by
the user.
McLaughlin and Herlocker [46] propose a modified precision measure in which
non-rated items are counted as not recommendable. This precision measure in fact
represents a lower-bound of the “real” precision.
Although the F-measure can be directly derived from the precision-recall values,
it is not common to find it in recommender systems evaluations. Huang et al. [39]
and Bozzon et al. [10], and Miyahara and Pazzani [48] are some of the few examples
of the use of this measure.
ROC curves have also been used in evaluating recommender systems. Zhang et
al. [58] use the value of the area under the ROC curve as their evaluation measure
when comparing the performance of different algorithms under attack. Banerjee and
Ramanathan [4] also use the ROC curves to compare the performance of different
models.
It must be noted, though, that the choice of a good evaluation measure, even
in the case of a top-N recommender system, is still a matter of discussion. Many
32 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
authors have proposed measures that are only indirectly related to these traditional
evaluation schemes. Deshpande and Karypis [21], for instance, propose the use of
the hit rate and the average reciprocal hit-rank. On the other hand, Breese et al. [12]
define a measure of the utility of the recommendation in a ranked list as a function
of the neutral vote.
4 Cluster Analysis
Clustering [37], also referred to as unsupervised learning, consists of assigning
items to groups so that the items in the same groups are more similar than items
in different groups: the goal is to discover natural (or meaningful) groups that ex-
ist in the data. Similarity is determined using a distance measure, such as the ones
reviewed in
2.1, between the feature vectors that represent the items. The goal of a
clustering algorithm is to minimize intra-cluster distances while maximizing inter-
cluster distances because these constitute measures of the quality of a particular
clustering. Intuitively this means that a good clustering of a set of data points shows
clearly distinct groups. Note that in clustering there is no prior knowledge of class
labels (as was the case in supervised learning). For example, a person who has an
mp3 song collection may not have the songs in individualfolders, but a good cluster-
ing algorithm might discover that the collection has mainly 3 groups (which could
correspond, for example, to classical, heavy metal, and folk).
There are two main categories of clustering algorithms: hierarchical and parti-
tional.
• Partitional clustering algorithms divide data items into non-overlapping clusters
such that each data item is in exactly one cluster.
• Hierarchical clustering algorithms successively cluster items within found clus-
ters, producing a set of nested cluster organized as a hierarchical tree.
Features used to represent an item play a crucial role in determining the cluster-
ing, as does the similarity metric used. In addition, items can be assigned member-
ship values within a group (in fuzzy clustering an items membership in a group is
assigned a value, commonly between 0 and 1), and it can be established that items
have to belong to only one group or may belong to several.
Many clustering algorithms try to minimize a function that measures the quality
of the clustering. Such a quality function is often referred to as the objective func-
tion, so clustering can be viewed as an optimization problem: the ideal clustering
algorithm would consider all possible partitions of the data and output the partition-
ing that minimizes the quality function. But the corresponding optimization problem
is NP hard, so many algorithms resort to heuristics (e.g., in the k-means algorithm
using only local optimization procedures potentially ending in local minima). The
main point is that clustering is a difficult problem for which finding optimal solu-
tions is often not possible.
Data Mining Methods for Recommender Systems 33
Selection of the particular clustering algorithm and its parameters (e.g., similarity
measure) depend on many factors, including the characteristics of the data. In the
following sections we describe the k-means clustering algorithm and some of its
alternatives.
4.1 k-Means
k-Means (also known as k-centers) clustering is a partitioning method. The function
partitions the data set of N items into k disjoint subsets S
j
that contain N
j
items so
that they are as close to each other as possible according a given distance measure.
Each cluster in the partition is defined by its members N
j
and by its centroid
λ
j
. The
centroid for each cluster is the point to which the sum of distances from all items in
that cluster is minimized. Thus, we can define the k-means algorithm as an iterative
process to minimize
E =
k
∑
1
∑
n∈S
j
d(x
n
,
λ
j
) (26)
where x
n
is a vector representing the n-th item,
λ
j
is the centroid of the item in S
j
and d is the distance measure. The k-means algorithm moves items between clusters
until E cannot be decreased further. The algorithm is described in Listing
4.
Algorithm 4 k-means
1: Input
2: X = x
1
,..., x
n
(items to be clustered)
3: k (number of clusters)
4: Output
5:
Λ
=
λ
1
,..,
λ
k
(cluster centroids)
6: m : X → C (cluster membership)
7:
8: Set the centroids
Λ
to their initial value (e.g. random selection of k items in X)
9:
10: for x
i
∈ X do
11: m(x
i
) = argmin
j∈{1..k}
d(x
i
,
λ
j
) (assign each item to the closest centroid)
12: end for
13:
14: while m has changed do
15: for j ∈ {1..k} do
16: Recalculate the centroid
λ
j
according to the items that belong to it {i|m(i) = j}
17: end for
18: for x
i
∈ X do
19: m(x
i
) = argmin
j∈{1..k}
d(x
i
,
λ
j
) (update the membership of x
i
to the closest centroid)
20: end for
21: end while
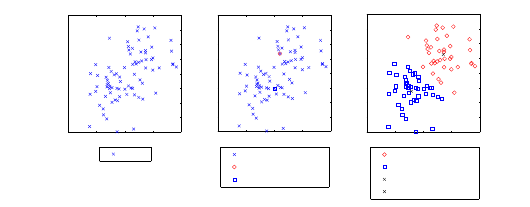
34 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
−4 −2 0 2 4
−4
−3
−2
−1
0
1
2
3
4
−4 −2 0 2 4
−4
−3
−2
−1
0
1
2
3
4
−4 −2 0 2 4
−4
−3
−2
−1
0
1
2
3
4
items
items
centroid of cluster 1
centroid of cluster 2
items of cluster 1
items of cluster 2
centroid of cluster 1
centroid of cluster 2
Fig. 13: Example of k-means, with k=2. From left to right, the data to be partitioned,
the initial 2 centroids as two data items chosen at random, and finally, the final
partition of the data in 2 clusters (with the centroid of the clusters as ×)
The algorithm works by randomly selecting k centroids. Then all items are as-
signed to the cluster whose centroid is the closest to them. The new cluster centroid
needs to be updated to account for the items who have been added or removed from
the cluster and the membership of the items to the cluster updated. This operation
continues until there are no further items that change their cluster membership. Most
of the convergence to the final partition takes place during the first iterations of the
algorithm, and therefore, the stopping condition is often changed to “until relatively
few points change clusters” in order to improve efficiency.
The distance measure depends on the data we need to cluster. In the example
in figure
13 we used the sum of square errors (SSE) (d(x
i
,
λ
j
) =
∑
k
(x
ik
−
λ
jk
)
2
).
However, other measures such as the Euclidian distance, Cosine similarity, Pearson
correlation, Manhattan distance or Hamming distance are also widely used.
The basic k-means has several shortcomings: (1) it does assume prior knowl-
edge of the data in order to choose the appropriate k. If the number of clusters is
unknown it is advisable to run the algorithm for a range of k and then choose the
partition whose in which the distance between the items of one cluster with respect
to the items of the rest of the clusters is high. (2) The final clusters are very sen-
sitive to the selection of the initial centroids. Thus, different runs of the algorithm
could yield different clusters. To address this issue it has been proposed to run m
replicas with different seeds – the initial centroid – and to return the one with the
lowest value of E. More sophisticated techniques involve data sampling and using
hierarchical clustering to determine the initial centroids. Another technique is to use
the Bisecting k-means, which is a a variant of k-means that can produce a hierar-
chical clustering. The last shortcoming (3) is that the basic k-means can produce
empty clusters, there are several strategies to deal with this issue, from treating it as
an error to treat it as a singleton, creating a new cluster consisting of the one point
furthest from its centroid.
k-means is an extremely simple and efficient algorithm but, apart from the is-
sued just described it does have several limitations with regard to the data. k-means
Data Mining Methods for Recommender Systems 35
has problems when clusters are of differing sizes, densities, non-globular shapes.
k-means also has problems when the data contains outliers.
4.2 Alternatives to k-means
Although the k-means algorithm presents limitations, the truth is that it is very diffi-
cult to find practical alternatives. In the following paragraphs we will briefly review
some of them.
Density-based clustering algorithms such as DBSCAN work by building up on
the definition of density as the number of points within a specified radius. DBSCAN,
for instance, defines three kinds of points: core points are those that have more than
a specified number of neighbors within a given distance; border points have fewer
than the specified number but belong to a core point neighborhood; and noise points
are those that are neither core or border. The algorithm iteratively removes noise
points and performs clustering on the remaining points.
Message-passing clustering algorithms are a very recent family of graph-based
clustering methods. Instead of considering an initial subset of the points as centers
and then iteratively adapt those, message-passing algorithms initially consider all
points as centers – usually known as exemplars in this context. During the algorithm
execution points, which are now considered nodes in a network, exchange messages
until clusters gradually emerge. Affinity Propagation is an important representative
of this family of algorithms [29] that works by defining two kinds of messages
between nodes: “responsibility”, which reflects how well-suited receiving point is
to serve as exemplar of the point sending the message, taking into account other
potential exemplars; and “availability”, which is sent from candidate exemplar to the
point and reflects how appropriate it would be for the point to choose the candidate
as its exemplar, taking into account support from other points that are choosing that
same exemplar. Affinity propagation has been applied, with very good results, to
problems as different as DNA sequence clustering, face clustering in images, or text
summarization.
Finally, Hierarchical Clustering, produces a set of nested clusters organized as
a hierarchical tree (dendogram). Hierarchical Clustering does not have to assume
a particular number of clusters in advanced. Also, any desired number of clusters
can be obtained by selecting the tree at the proper level. Hierarchical clusters can
also sometimes correspond to meaningful taxonomies. Traditional hierarchical al-
gorithms use a similarity or distance matrix and merge or split one cluster at a time.
There are two main approaches to hierarchical clustering. In agglomerative hier-
archical clustering we start with the points as individual clusters and at each step,
merge the closest pair of clusters until only one cluster (or k clusters) are left. In
divisive hierarchical clustering we start with one, all-inclusive cluster, and at each
step, split a cluster until each cluster contains a point (or there are k clusters).

36 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
4.3 Cluster Analysis in Recommender Systems
The main problem for scaling a collaborative filtering classifier is the amount of op-
erations involved in computing distances – for finding the best k-nearest neighbors,
for instance. A possible solution is, as we saw in section
2.3, to reduce dimension-
ality. But, even if we reduce dimensionality of features, we might still have many
objects to compute the distance to. This is where clustering algorithms can come
into play. The same is true for content-based recommendersystems, where distances
among objects are needed to retrieve similar ones.
Clustering is sure to improve efficiency because the number of operations is re-
duced. However, and unlike dimensionality reduction methods, it is unlikely that it
can help improve accuracy. Therefore, clustering must be applied with care when
designing a recommender system, measuring the compromise between improved
efficiency and a possible decrease in accuracy.
We shall now review some known applications of clustering techniques in rec-
ommender systems.
Xue et al. [70] present a typical use of clustering in the context of a recommender
systems by employing the k-means algorithm as a pre-processing step to help in
neighborhood formation. They do not restrict the neighborhood to the cluster the
user belongs to but rather use the distance from the user to different cluster cen-
troids as a pre-selection step for the neighbors. They also implement a cluster-based
smoothing technique in which missing values for users in a cluster are replaced
by cluster representatives. Their method is reported to perform slightly better than
standard kNN-based collaborative filtering.
In a similar way, Sarwar et al. [23] describe an approach to implement a scalable
kNN classifier. They partition the user space by applying the bisecting k-means al-
gorithm and then use those clusters as the base for neighborhood formation. They
report a decrease in accuracy of around 5% as compared to standard kNN CF. How-
ever, their approach allows for a significant improvement in efficiency.
Connor and Herlocker [18] present a different approach in which, instead of
users, they cluster items. Using the Pearson Correlation similarity measure they try
out four different algorithms: average link hierarchichal agglomerative [35], robust
clustering algorithm for categorical attributes (ROCK) [36], kMetis, and hMetis
4
.
Although clustering did improve efficiency, all of their clustering techniques yielded
worse accuracy and coverage than the non-partitioned baseline.
Li et al. [54] and Ungar and Foster [63] present a very similar approach for using
k-means clustering for solving a probabilistic model interpretation of the recom-
mender problem.
To the best of our knowledge, alternatives to k-means such as the ones presented
in section
4.2 have not been applied to recommender systems. The simplicity and
efficiency of the k-means algorithm shadows possible alternatives. It is not clear
whether density-based or hierarchical clustering approaches have anything to offer
in the recommender systems arena. On the other hand, message-passing algorithms
4
http://www.cs.umn.edu/ karypis/metis
Data Mining Methods for Recommender Systems 37
have been shown to be more efficient and their graph-based paradigm can be easily
translated to the recommender systems problem. It is possible that we see applica-
tions of these algorithms in the coming years.
5 Association Analysis
Association Rule Mining focuses on finding rules that will predict the occurrence of
an item based on the occurrences of other items in a transaction. The fact that two
items are found to be related means co-occurrence but not causality.
We define an itemset as a collection of one or more items (e.g. (Milk, Beer,
Diaper)). A k-itemset is an itemset that contains k items. The frequency of a given
itemset is knownas support count (e.g. (Milk, Beer, Diaper) = 131). And the support
of the itemset is the fraction of transactions that contain it (e.g. (Milk, Beer, Diaper)
= 0.12). A frequent itemset is an itemset with a support that is greater or equal to a
minsup threshold.
An association rule is an expression of the form X ⇒ Y, where X and Y are
itemsets. (e.g. Milk,Diaper ⇒ Beer). In this case the support of the association
rule is the fraction of transactions that have both X and Y. On the other hand, the
confidence of the rule is how often items in Y appear in transactions that contain X.
Given a set of transactions T, the goal of association rule mining is to find
all rules having support ≥ minsupthreshold and confidence ≥ minconfthreshold.
The brute-force approach would be to list all possible association rules, compute the
support and confidence for each rule and then prune rules that do not satisfy both
conditions. This is, however, computationally very expensive.
For this reason, we take a two-step approach: (1) Generate all itemsets whose
support ≥ minsup (Frequent Itemset Generation); (2) Generate high confidence
rules from each frequent itemset (Rule Generation)
5.1 Frequent Itemset generation and the Apriori Principle
But if we follow a brute-force approach, frequent itemset generation is still compu-
tationally expensive. Each itemset in the lattice is a candidate frequent itemset and
we have to count the support of each candidate by scanning the transaction database
(i.e. match each transaction against every candidate).
Several techniques exist to optimize the generation of frequent itemsets. On a
broad sense they can be classified into those that try to minimize the number of
candidates (M), those that reduce the number of transactions (N), and those that
reduce the number of comparisons (NM).
The most common approach though, is to reduce the number of candidates using
the Apriori principle. This principle states that if an itemset is frequent, then all of
its subsets must also be frequent. This is verified using the support measure because
38 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
the support of an itemset never exceeds that of its subsets. The Apriori Algorithm is
a practical implementation of the principle. Its basic steps are illustrated in listing
5.
Algorithm 5 Apriori algorithm
1: Let k=1
2: Generate frequent itemsets of length 1
3: repeat
4: Generate length (k+1) candidate itemsets from length k frequent itemsets
5: Prune candidate itemsets containing subsets of length k that are infrequent
6: Count the support of each candidate by scanning the DB
7: Eliminate candidates that are infrequent, leaving only those that are frequent
8: until no new frequent itemsets are identified
Several implementation strategies are also possible to reduce the number of com-
parisons. However, no matter what strategies we adopt, we need to be aware of the
factors that affect computational complexity. First, there is the minimum support
threshold. A lower threshold may produce more and longer frequent itemsets. An-
other factor that affects is the number of items of the data set (dimensionality). More
items means more space to store support count. The size of the transaction database
might also affect algorithms such as the Apriori, which requires multiple passes.
5.2 Rule Generation
Given a frequent itemset L, the goal when generating rules is to find all non-empty
subsets that satisfy the minimum confidence requirement.
If |L| = k, then there are 2k2 candidate association rules. So, as in the frequent
itemset generation, we need to find ways to generate rules efficiently.
For the Apriori Algorithm we can generate candidate rules by merging two rules
that share the same prefix in the rule consequent. E.g. join(CD ⇒ AB,BD ⇒ AC)
would produce the candidate rule D ⇒ ABC. We could therefore prune rule D ⇒
ABC provided that its subset AD ⇒ BC does not have high confidence.
5.3 Association Rules in Recommender Systems
The effectiveness of association rule mining for uncovering patterns and driving
personalized marketing decisions has been known for a some time [2]. However,and
although there is a clear relation between this method and the goal of a recommender
system, they have not become mainstream. The main reason is that this approach is
similar to item-based collaborative filtering but is less flexible since it requires of an
explicit notion of transaction – e.g. co-ocurrence of events in a given session. In the
Data Mining Methods for Recommender Systems 39
next paragraphs we present some promising examples, some of which indicate that
association rules still have not had their last word.
Mobasher et al. [49] present a system for web personalization based on associ-
ation rules mining. Their system identifies association rules from pageviews co-
occurrences based on users navigational patterns. Their approach outperforms a
kNN-based recommendation system both in terms of precision and coverage.
Smyth et al. [61] present two different case studies of using association rules for
recommender systems. In the first case they use the a priori algorithm to extract item
association rules from user profiles in order to derive a better item-item similarity
measure. In the second case, they apply association rule mining to a conversational
recommender. The goal here is to find co-occurrent critiques – i.e. user indicating a
preference over a particular feature of the recommended item.
Lin et al. [45] present a new association mining algorithm that adjusts the min-
imum support of the rules during mining in order to obtain an appropriate num-
ber of significant rule therefore addressing some of the shortcomings of previ-
ous algorithms such as the a priori. They mine both association rules between
users and items. The measured accuracy outperforms previously reported values for
correlation-based recommendation and is similar to the more elaborate approaches
such as the combination of SVD and ANN.
As already mentioned in section
3.2.1, Cho et al. [14] combine Decision Trees
and Association Rule Mining in a web shop recommender system. In their system,
association rules are derived in order to link related items. The recommendation is
then computed by intersecting association rules with user preferences. They look for
association rules in different transaction sets such as purchases, basket placement,
and click-through. They also use a heuristic for weighting rules coming from each
of the transaction sets. Purchase association rules, for instance, are weighted higher
than click-through association rules.
6 Conclusions
This chapter has introduced the main data mining methods and techniques that can
be applied in the design of a recommender system. We have also surveyed their use
in the literature and provided some rough guidelines on how and where they can be
applied.
We started by reviewing techniques that can be applied in the pre-processing
step. First, there is the choice of an appropriate distance measure, which is reviewed
in Section
2.1. This is required by most of the methods in the following steps. The
cosine similarity and Pearson correlation are commonly accepted as the best choice.
Although there have been many efforts devoted to improving these distance mea-
sures, recent works seem to report that the choice of a distance function does not
play such an important role. Then, in Section
2.2, we reviewed the basic sampling
techniques that need to be applied in order to select a subset of an originaly large
data set, or to separating a training and a testing set. Finally, we discussed the use of
40 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
dimensionality reduction techniques such as Principal Component Analysis and Sin-
gular Value Decomposition in Section
2.3. These techniques offer a dual advantage:
On the one hand they reduce dimensionality and avoid the curse of dimensionality
problem; on the other, they help reduce some of the noise in the original data set. We
explained some success stories using dimensionality reduction tecniques, especially
in the context of the Netflix prize.
In Section
3, we reviewed the main classification methods: namely, nearest-
neighbors, decision trees, rule-based classifiers, bayesian networks, artificial neural
networks, and support vector machines. We saw that, although kNN ( see Section
3.1) collaborative filtering is the preferred approach, all those classifiers can be ap-
plied in different settings. Decision trees ( see Section 3.2) can be used to derive a
model based on the content of the items or to model a particular part of the system.
Decision rules ( see Section
3.3) can be derived from a pre-existing decision trees,
or can also be used to introduce business or domain knowledge. Bayesian networks
( see Section
3.4) are a popular approach to content-based recommendation, but
can also be used to derive a model-based collaborative filtering system. In a similar
way, artificial neural networks can be used to derive a model-based recommender.
Finally, support vector machines ( see Section
3.6) are gaining popularity also as a
way to infer content-based classifications or derive a collaborative filtering model.
Choosing the right classifier for a recommender system is not easy and is in
many senses task and data-dependent. In the case of collaborative filtering, some
results seem to indicate that model-based approaches using classifiers such as the
SVM or Bayesian Networks can slightly improve performance of the standard kNN
classifier. However, those results are non-conclusive and hard to generalize. In the
case of a content-based recommender system there is some evidence that in some
cases Bayesian Networks will perform better than simpler methods such as decision
trees. However, it is not clear that more complex non-linear classifiers such as the
ANN or SVMs can perform better.
Therefore, the choice of the right classifier for a specific recommending task still
has nowadays much of exploratory. A practical rule-of-thumb is to start with the
simplest approach and only introduce complexity if the performance gain obtained
justifies it. The performance gain should of course balance different dimensions
such as prediction accuracy or computational efficiency.
We reviewed clustering algorithms in Section
4. Clustering is usually used in
recommender systems to improve performance. A previous clustering step, either
in the user of item space, reduces the number of distance computations we need to
perform. However, this usually comes at the price of a lower accuracy so it should
be handled with care. As a matter of fact, improving efficiency by using a dimen-
sionality reduction technique such as SVD is probably a better choice in the general
case. As opposed to what happens with classifiers, not so many clustering algo-
rithms have been used in the context of recommender systems. The simpliciy and
relative efficiency of the k-means algorithm (see Section
4.1) make it hard to find
a practical alternative. We reviewed some of them such as Hierarchical Clustering
or Message-passing algorithms in Section
4.2. Although these techniques have still
Data Mining Methods for Recommender Systems 41
not been applied for recommender systems, they offer a promising avenue for future
research.
Finally, in Section
5, we described association rules and surveyed their use in
recommender systems. Association rules offer an intuititive framework for recom-
mending items whenever there is an explicit or implicit notion of transaction. Al-
though there exist efficient algorithms for computing association rules, and they
have proved more accurate than standard kNN collaborative filtering, they are still
not a favored approach.
The choice of the right data mining technique in designing a recommender sys-
tem is a complex task that is bound by many problem-specific constraints. However,
we hope that the short review of techniques and experiences included in this chapter
can help the reader make a much more informed decision. Besides, we have also
uncovered areas that are open to many further improvements, and where there is
still much exciting and relevant research to be done in the coming years.
References
1. G. Adomavicius and A. Tuzhilin. Toward the next generation of recommender systems: A
survey of the state-of-the-art and possible extensions. IEEE Transactions on Knowledge and
Data Engineering, 17(6):734–749, 2005.
2. R. Agrawal and R. Srikant. Fast algorithms for mining association rules in large databases. In
Proceedings of the 20th International Conference on Very Large Data Bases, 1994.
3. M. Anderson, M. Ball, H. Boley, S. Greene, N. Howse, D. Lemire, and S. McGrath. Racofi:
A rule-applying collaborative filtering system. In Proc. IEEE/WIC COLA’03, 2003.
4. S. Banerjee and K. Ramanathan. Collaborative filtering on skewed datasets. In Proc. of WWW
’08, 2008.
5. C. Basu, H. Hirsh, and W. Cohen. Recommendation as classification: Using social and
content-based information in recommendation. In In Proceedings of the Fifteenth National
Conference on Artificial Intelligence, pages 714–720. AAAI Press, 1998.
6. C. Basu, H. Hirsh, and W. Cohen. Recommendation as classification: Using social and
content-based information in recommendation. In AAAI Workshop on Recommender Systems,
1998.
7. R. Bell and Y. Koren. Improved neighborhood-based collaborative filtering. In In proceedings
of KDDCup ’07, 2007.
8. R. M. Bell, Y. Koren, and C. Volinsky. The bellkor solution to the netflix prize. Technical
report, AT&T Labs Research, 2007.
9. A. Bouza, G. Reif, A. Bernstein, and H. Gall. Semtree: ontology-based decision tree algorithm
for recommender systems. In International Semantic Web Conference, 2008.
10. A. Bozzon, G. Prandi, G. Valenzise, and M. Tagliasacchi. A music recommendation sys-
tem based on semantic audio segments similarity. In Proceeding of Internet and Multimedia
Systems and Applications - 2008, 2008.
11. M. Brand. Fast online svd revisions for lightweight recommender systems. In SIAM Interna-
tional Conference on Data Mining (SDM), 2003.
12. J. Breese, D. Heckerman, and C. Kadie. Empirical analysis of predictive algorithms for col-
laborative filtering. In Proceedings of the Fourteenth Annual Conference on Uncertainty in
Artificial Intelligence, page 4352, 1998.
13. R. Burke. Hybrid web recommender systems. pages 377–408. 2007.
14. Y. Cho, J. Kim, and S. Kim. A personalized recommender system based on web usage mining
and decision tree induction. Expert Systems with Applications, (23), 2002.
42 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
15. C. Christakou and A. Stafylopatis. A hybrid movie recommender system based on neural
networks. In ISDA ’05: Proceedings of the 5th International Conference on Intelligent Systems
Design and Applications, pages 500–505, 2005.
16. W. Cohen. Fast effective rule induction. In Machine Learning: Proceedings of the 12th
International Conference, 1995.
17. R. Collobert and S. Bengio. Svmtorch: Support vector machines for large-scale regression
problems. Journal of Machine Learning Research, 1:143–160, 2001.
18. M. Connor and J. Herlocker. Clustering items for collaborative filtering. In SIGIR Workshop
on Recommender Systems, 2001.
19. T. Cover and P. Hart. Nearest neighbor pattern classification. Information Theory, IEEE
Transactions on, 13(1):21–27, 1967.
20. N. Cristianini and J. Shawe-Taylor. An Introduction to Support Vector Machines and Other
Kernel-based Learning Methods. Cambridge University Press, March 2000.
21. M. Deshpande and G. Karypis. Item-based top-n recommendation algorithms. ACM Trans.
Inf. Syst., 22(1):143–177, 2004.
22. J. W. Eaton, D. Bateman, and S. Hauberg. GNU Octave Manual Version 3. Network Theory
Ltd., 2008.
23. B. S. et al. Recommender systems for large-scale e-commerce: Scalable neighborhood forma-
tion using clustering. In Proceedings of the Fifth International Conference on Computer and
Information Technology, 2002.
24. K. O. et al. Context-aware svm for context-dependent information recommendation. In Inter-
national Conference On Mobile Data Management, 2006.
25. P. T. et al. Introduction to Data Mining. Addison Wesley, 2005.
26. S. G. et al. Tv content recommender system. In AAAI/IAAI 2000, 2000.
27. S. H. et al. Aimed- a personalized tv recommendation system. In Interactive TV: a Shared
Experience, 2007.
28. T. B. et al. A trail based internet-domain recommender system using artificial neural networks.
In Proceedings of the Int. Conf. on Adaptive Hypermedia and Adaptive Web Based Systems,
2002.
29. B. J. Frey and D. Dueck. Clustering by passing messages between data points. Science, 307,
2007.
30. N. Friedman, D. Geiger, and M. Goldszmidt. Bayesian network classifiers. Mach. Learn.,
29(2-3):131–163, 1997.
31. S. Funk. Netflix update: Try this at home, 2006.
32. R. Ghani and A. Fano. Building recommender systems using a knowledge base of product
semantics. In In 2nd International Conference on Adaptive Hypermedia and Adaptive Web
Based Systems, 2002.
33. K. Goldberg, T. Roeder, D. Gupta, and C. Perkins. Eigentaste: A constant time collaborative
filtering algorithm. Journal Information Retrieval, 4(2):133–151, July 2001.
34. G. Golub and C. Reinsch. Singular value decomposition and least squares solutions. Nu-
merische Mathematik, 14(5):403–420, April 1970.
35. E. Gose, R. Johnsonbaugh, and S. Jost. Pattern Recognition and Image Analysis. Prentice
Hall, 1996.
36. S. Guha, R. Rastogi, and K. Shim. Rock: a robust clustering algorithm for categorical at-
tributes. In Proc. of the 15th Intl Conf. On Data Eng., 1999.
37. J. A. Hartigan. Clustering Algorithms (Probability & Mathematical Statistics). John Wiley &
Sons Inc.
38. J. L. Herlocker, J. A. Konstan, L. G. Terveen, and J. T. Riedl. Evaluating collaborative filtering
recommender systems. ACM Trans. Inf. Syst., 22(1):5–53, 2004.
39. Z. Huang, D. Zeng, and H. Chen. A link analysis approach to recommendation under sparse
data. In Proceedings of AMCIS 2004, 2004.
40. A. Isaksson, M. Wallman, H. G¨oransson, and M. G. Gustafsson. Cross-validation and boot-
strapping are unreliable in small sample classification. Pattern Recognition Letters, 29:1960–
1965, 2008.
Data Mining Methods for Recommender Systems 43
41. I. T. Jolliffe. Principal Component Analysis. Springer, 2002.
42. H. Kang and S. Yoo. Svm and collaborative filtering-based prediction of user preference for
digital fashion recommendation systems. IEICE Transactions on Inf & Syst, 2007.
43. M. Kurucz, A. A.Benczur, and K. Csalogany. Methods for large scale svd with missing values.
In Proceedings of KDD Cup and Workshop 2007, 2007.
44. N. Lathia, S. Hailes, and L. Capra. The effect of correlation coefficients on communities of
recommenders. In SAC ’08: Proceedings of the 2008 ACM symposium on Applied computing,
pages 2000–2005, New York, NY, USA, 2008. ACM.
45. W. Lin and S. Alvarez. Efficient adaptive-support association rule mining for recommender
systems. Data Mining and Knowledge Discovery Journal, 6(1), 2004.
46. M. R. McLaughlin and J. L. Herlocker. A collaborative filtering algorithm and evaluation
metric that accurately model the user experience. In Proc. of SIGIR ’04, 2004.
47. S. M. McNee, J. Riedl, and J. A. Konstan. Being accurate is not enough: how accuracy metrics
have hurt recommender systems. In CHI ’06: CHI ’06 extended abstracts on Human factors
in computing systems, pages 1097–1101, New York, NY, USA, 2006. ACM Press.
48. K. Miyahara and M. J. Pazzani. Collaborative filtering with the simple bayesian classifier. In
Pacific Rim International Conference on Artificial Intelligence, 2000.
49. B. Mobasher, H. Dai, T. Luo, and M. Nakagawa. Effective personalization based on asso-
ciation rule discovery from web usage data. In Workshop On Web Information And Data
Management, WIDM ’01.
50. A. Paterek. Improving regularized singular value decomposition for collaborative filtering. In
Proceedings of KDD Cup and Workshop 2007, 2007.
51. M. J. Pazzani and D. Billsus. Learning and revising user profiles: The identification of inter-
esting web sites. Machine Learning, 27(3):313–331, 1997.
52. V. Pronk, W. Verhaegh, A. Proidl, and M. Tiemann. Incorporating user control into recom-
mender systems based on naive bayesian classification. In RecSys ’07: Proceedings of the
2007 ACM conference on Recommender systems, pages 73–80, 2007.
53. D. Pyle. Data Preparation for Data Mining. Morgan Kaufmann, second edition edition, 1999.
54. B. K. Q. Li. Clustering approach for hybrid recommender system. In Web Intelligence 03,
2003.
55. J. R. Quinlan. Induction of decision trees. Machine Learning, 1(1):81–106, March 1986.
56. S. Rendle and L. Schmidt-Thieme. Online-updating regularized kernel matrix factorization
models for large-scale recommender systems. In Recsys ’08: Proceedings of the 2008 ACM
conference on Recommender Systems, 2008.
57. G. W. F. L. T. K. S. Deerwester, S. T. Dumais and R. Harshman. Indexing by latent semantic
analysis. Journal of the American Society for Information Science, 41, 1990.
58. J. F. S. Zhang, Y. Ouyang and F. Makedon. Analysis of a low-dimensional linear model under
recommendation attacks. In Proc. of SIGIR ’06, 2006.
59. B. Sarwar, G. Karypis, J. Konstan, and J. Riedl. Incremental svd-based algorithms for highly
scalable recommender systems. In 5th International Conference on Computer and Information
Technology (ICCIT), 2002.
60. B. M. Sarwar, G. Karypis, J. A. Konstan, and J. T. Riedl. Application of dimensionality
reduction in recommender systemsa case study. In ACM WebKDD Workshop, 2000.
61. B. Smyth, K. McCarthy, J. Reilly, D. O‘Sullivan, L. McGinty, and D. Wilson. Case studies
in association rule mining for recommender systems. In Proc. of International Conference on
Artificial Intelligence (ICAI ’05), 2005.
62. E. Spertus, M. Sahami, and O. Buyukkokten. Evaluating similarity measures: A large-scale
study in the orkut social network. In Proceedings of the 2005 International Conference on
Knowledge Discovery and Data Mining (KDD-05), 2005.
63. L. H. Ungar and D. P. Foster. Clustering methods for collaborative filtering. In Proceedings
of the Workshop on Recommendation Systems, 2000.
64. A. R. M. W. L. Martinez. Exploratory Data Analysis. Chapman & Hall, 2004.
65. I. H. Witten and E. Frank. Data Mining: Practical Machine Learning Tools and Techniques.
Morgan Kaufmann, second edition edition, 2005.
44 Xavier Amatriain, Alejandro Jaimes, Nuria Oliver, and Josep M. Pujol
66. I. H. Witten and E. Frank. Data Mining: Practical machine learning tools and techniques.
Morgan Kaufmann, 2nd edition edition, 2005.
67. M. Wu. Collaborative filtering via ensembles of matrix factorizations. In Proceedings of KDD
Cup and Workshop 2007, 2007.
68. Z. Xia, Y. Dong, and G. Xing. Support vector machines for collaborative filtering. In ACM-SE
44: Proceedings of the 44th annual Southeast regional conference, pages 169–174, New York,
NY, USA, 2006. ACM.
69. J. Xu and K. Araki. A svm-based personal recommendation system for tv programs. In
Multi-Media Modelling Conference Proceedings.
70. G.-R. Xue, C. Lin, Q. Yang, W. Xi, H.-J. Zeng, Y. Yu, and Z. Chen. Scalable collaborative
filtering using cluster-based smoothing. In Proceedings of the 2005 SIGIR, 2005.
71. K. Yu, V. Tresp, and S. Yu. A nonparametric hierarchical bayesian framework for information
filtering. In SIGIR ’04, 2004.
72. Y. Zhang and J. Koren. Efficient bayesian hierarchical user modeling for recommendation
system. In SIGIR 07, 2007.
73. C.-N. Ziegler, S. M. McNee, J. A. Konstan, and G. Lausen. Improving recommendation lists
through topic diversification. In Proc. of WWW ’05, 2005.
74. J. Zurada. Introduction to artificial neural systems. West Publishing Co., St. Paul, MN, USA,
1992.
