
Determining
All
Optimal and Near-Optimal
Solutions when Solving Shortest Path Problems
by Dynamic Programming
THOMAS H. BYERS
Digital Research
Inc.,
Monterey, California
MICHAEL
S.
WATERMAN
University of Southern California,
Los
Angeles, California
(Received
May
1982;
accepted October
1983)
This paper presents a new algorithm for finding all solutions with objective
function values in the neighborhood of the optimum for certain dynamic pro-
gramming
models,
including shortest path problems. The new algorithm com-
bines the depth-first search with stacking techniques of theoretical computer
science
and
principles
from
dynamic programming to modify the usual back-
tracking routine and list all nearoptimal policies. The resulting procedure
is
the
first practical algorithm for a variety of large problems that are of interest.
HE
ALGORITHM presented in this paper was motivated by a study
T
of the evolutionary distance problem in molecular biology. In this
context, dynamic programming methods are used to investigate evolu-
tionary relationships between two DNA sequences (Smith et al. [1981]).
The specific sequences studied implied a network of approximately
2,200
nodes and 110,OOO arcs
so
that analysis by Kth shortest path methods
was not practical. Details of this study have been published elsewhere
(Waterman [1983]).
Consider a directed acyclic network or, more generally,
a
network with
no cycle whose length is nonpositive.
A
simple method is presented
for
finding all paths from node
1
to node
N
whose lengths are within a
prescribed distance
e(e
2
0)
of the length of the shortest path(s) from
node
1
to node
N.
The algorithm uses a push-down (last-in, first-out)
stack and has modest memory requirements. This new method is easy
to
understand and
to
code, which, with the memory requirements, accords
it
a
special advantage over Kth shortest path calculations. See Dreyfus
[
19691 for a review of shortest path algorithms.
To describe the new method let
t(x,
y)
denote the length of arc
(x,
y)
in the network. With
f(N)
=
0,
let
f(x)
denote the length of the shortest
Subject
clrrssificatbn:
111
near-optimal
policies.
1381
Operations
Research
0030-364X/84/3206-1381$01.25
Vol.
32,
No.
6,
November-December
1984
0
1984
Operations Research Society
of
America
1382
Technical
Notes
path(s) from node
x(x
#
N)
to
node
N.
For methods that compute
f-
values, see Dreyfus and Law
[
19761 or Denardo
[
19821. Consider
a
node
x
#
N.
Some path
P
of
length
d
led us from node
1
to node
x.
Arc
(x,
y)
is now said to
enter
if
d
+
t(x,
Y)
+
f(y)
f(1)
+
e.
(1)
Hence, the arcs that enter are those on paths from node
1
to
node
N
having path length within
e
of the shortest path length.
The depth-first procedure lets one use the same path
P
for each entry
w
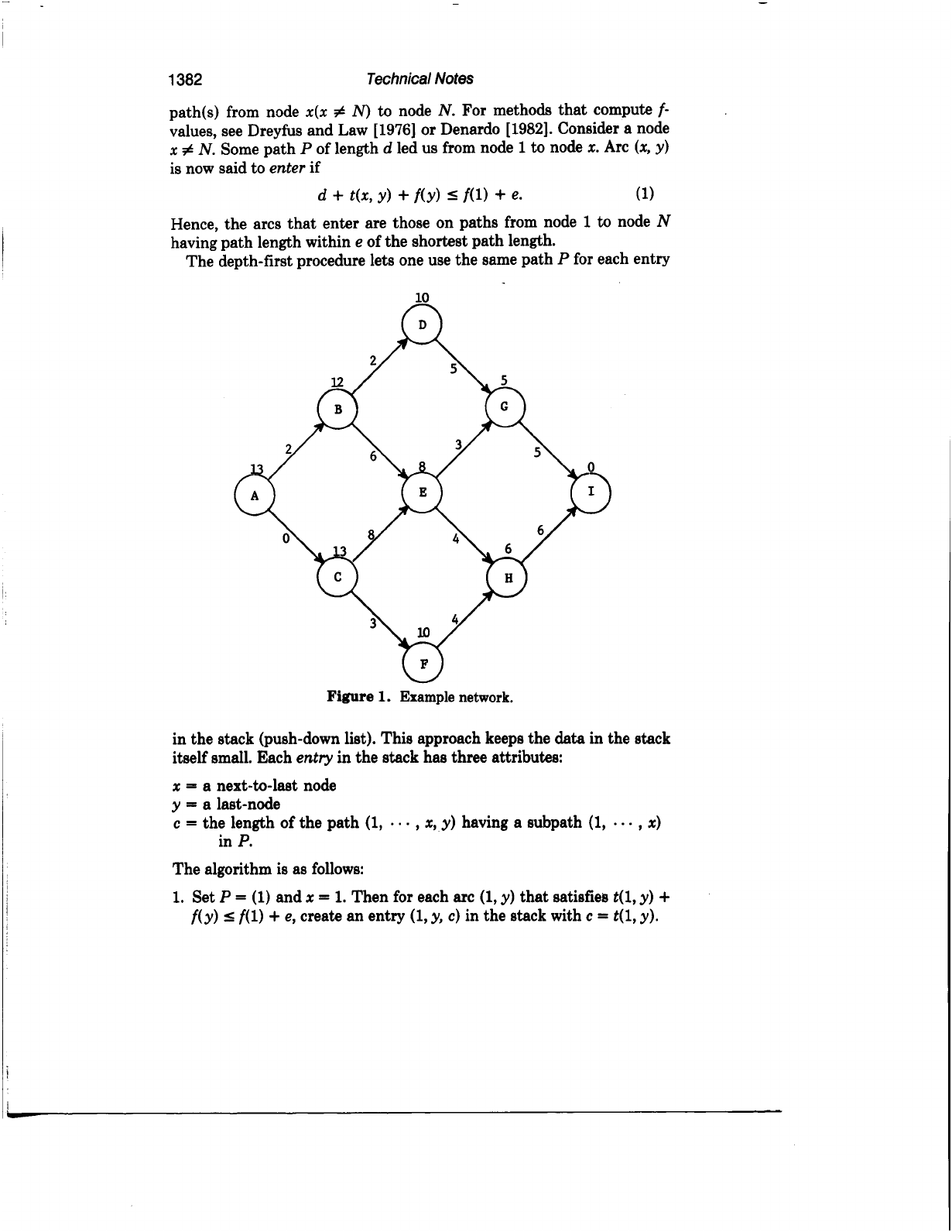
Figure
1.
Example
network.
in the stack (push-down list). This approach keeps the
data
in the stack
itself small. Each
entry
in the stack has three attributes:
x
=
a next-to-last node
y
=
a last-node
c
=
the length
of
the path
(1,
-
,
x,
y)
having a subpath
(1,
- - -
,
x)
The algorithm is as follows:
1.
Set
P
=
(1)
and
x
=
1.
Then for each arc
(1,
y)
that satisfies
t(1,
y)
+
f(
y)
I
f(
1)
+
e,
create an entry
(1,
y,
c)
in the stack with
c
=
t(
1,
y).
in
P.
Byers and Waterman
1383
2.
Stop if the stack is empty.
3.
Remove
(POP)
the topmost entry
(x,
y,
c)
in the stack. Replace
P
=
(1,
- -
-
,
x)
by
P
=
(1,
.. .
,
x,
y).
Ify
=
N,
go
to
Step
4.
Ify#
N,
let
x
t
y
and
d
t
c.
Then for each arc
(x,
y)
satisfying
(l),
create an entry
(x,
y,
c)
in the stack with
c
=
d
+
(t(x,
y).
Go
to
Step
2.
4.
Output
P
and
c.
Go
to Step
3.
In the case of an acyclic network, the number of elements in the stack
at any one time is at most the number
IA
I
of
arcs in the network. Since
(z,
y,
c)
in the stack implies arcs leaving
y
are not associated with the
stack, the actual stack size
is
much smaller than this bound indicates. In
a cyclic network whose shortest cycle has length
L
>
0,
the number of
elements in the stack is at most
IAI
Te/L1,
where
rzl
is the smallest
integer
a
that satisfies
a
L
z.
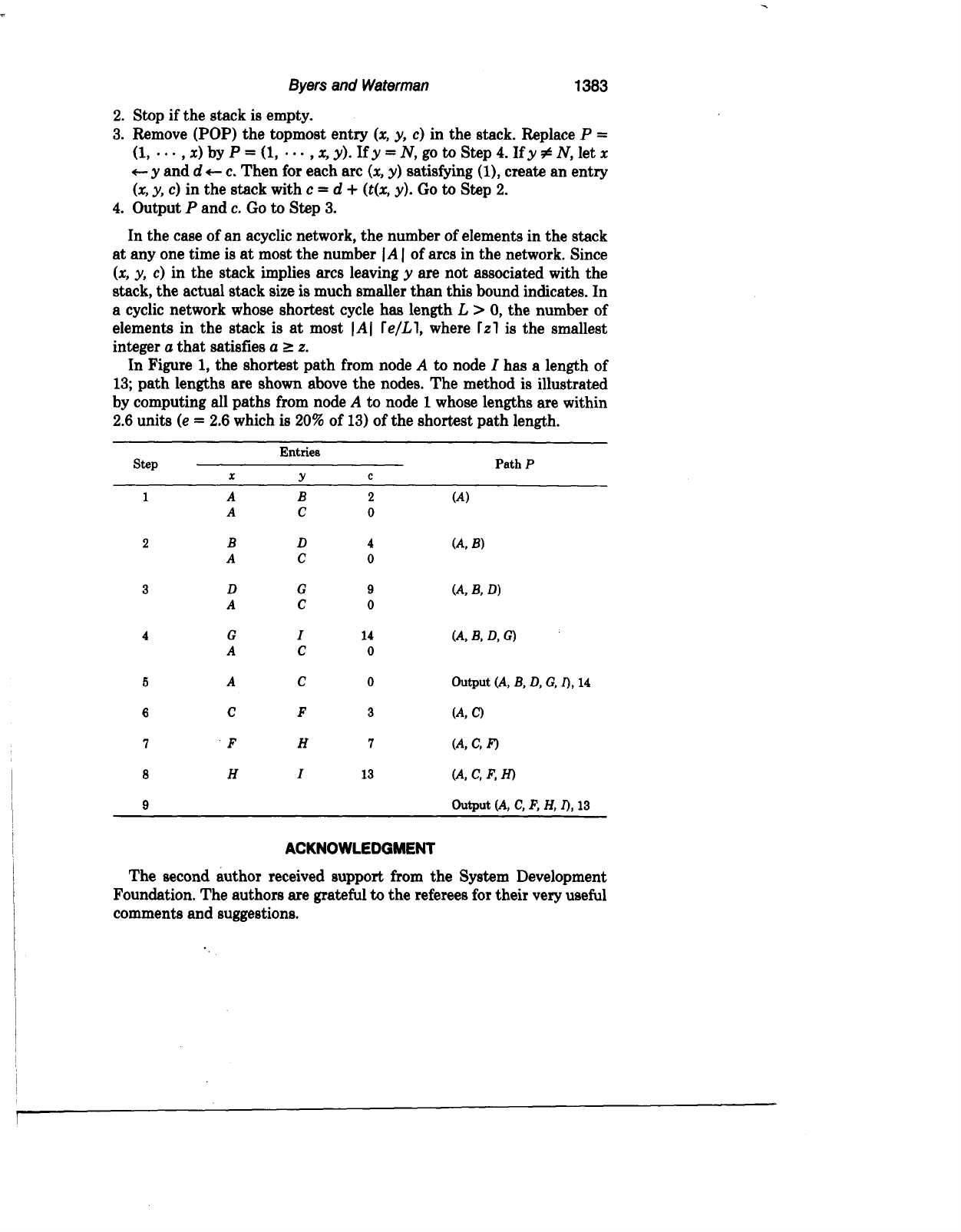
In Figure
1,
the shortest path from node
A
to
node
I
has a length of
13;
path lengths are shown above the nodes. The method is illustrated
by computing all paths from node
A
to node
1
whose lengths are within
2.6
units
(e
=
2.6
which
is
20%
of
13)
of the shortest path length.
Entries
Path
P
31
Y
step
C
.
1
A
B
2
(A
)
A
c
0
2
B
D
4
(A,
B)
A
c
0
3
D
G
9
(A,
B,
D)
A
c
0
4
G
Z
14
(A,
E,
D,
G)
A
C
0
6
A
C
0
Output
(A,
B,
D,
G,
I),
14
6
C
F
3
(A,
C)
7
'F
H
7
(A,
C,
F)
8
H
Z
13
(A,
C,
F,
H)
ACKNOWLEDGMENT
The second author received support from the System Development
Foundation. The authors are grateful
to
the referees for their very useful
comments and suggestions.
1
384
T€!ChniC8/
NOf&
REFERENCES
DENARDO, E. 1982.
Dynamic Programming:
Models
and
Applications.
Prentice-
DREYFUS,
S.
1969. Appraisal of Some Shortest Path Algorithms.
Opns.
Res.
17,
DREYFUS,
S.,
AND
A. LAW. 1976.
The
Art and
Theory
of
Dynamic Programming.
SMITH,
T.,
M. WATERMAN
AND
W. FITCH. 1981. Comparative Biosequence
WATERMAN, M. 1983. Sequence Alignments in the Neighborhood of the Opti-
Hall, Englewood Cliffs,
N.J.
395-4 12.
Academic Press, New
York.
Metrics.
J.
Mol.
EvoL
18,
38-46.
mum.
Proc. Natl. Acad. Sci. U.S.A.
80,3123-3124.
