arXiv:2009.00727v2 [eess.SY] 11 Sep 2020
Performance Analysis and Non-Quadratic Lyapunov Functions for
Linear Time-Varying Systems
Matthew Abate, Corbin Klett, Samuel Coogan, and Eric Feron
Abstract— Performance analysis for linear time-invariant
(LTI) systems has been cl osely tied to quadratic Lyapunov
functions ever since it was shown that LTI system stability is
equivalent to the existence of such a Lyapunov function. Some
metrics for LTI systems, however, have resisted treatment via
means of quadratic Lyapunov functions. Among these, point-
wise-in-time metrics, such as peak norms, are not captured
accurately using these techniques, and this shortcoming has
prevented the development of tools to analyze system behavior
by means other than e.g. time-domain simulations. This work
demonstrates how the more general class of homogeneous poly-
nomial Lyapunov functions can be used to approximate point-
wise-in-time behavior for LTI systems with greater accuracy,
and we extend this to the case of linear time-varying (LTV)
systems as well. Our findings rely on th e recent observation that
the search for homogeneous polynomial Lyapunov functions for
LTV systems can be recast as a search for quadratic Lyapunov
functions for a related hierarchy of time-varying Lyapunov
differential equations; thus, performance guarantees for LTV
systems are attainable without heavy computation. Numerous
examples are provided to demonstrate the findings of this work.
I. INTRODUCTION
Beginner’s courses on linear systems quickly introduce the
Lyapunov function as a natur al means to expre ss system
stability in terms of energy lo ss. O ne essential result of
Lyapunov states that the stability of a linear time invariant
(LTI) system is equ ivalent to the existence of a quadratic
energy function that decays along system trajector ie s [1],
and since then qua dratic stability theory has been greatly
extended to develop metrics and indicators of performance
such as passivity [2, Chapte r 14], [3] and robustness [4].
These metrics generally leverage the ubiq uitous presence of
the quadratic Lyapunov functions that are n a turally embed-
ded in stable LTI systems [5].
Some metric s for LTI systems, however, have resisted
treatment via means of quadra tic Lyapunov functions.
Among these, poin t-wise-in-time metrics, such as peak
norms, are not captured accurately [6], and this shortcoming
has prevented the development of tools to analyze system
behavior by me a ns oth er than time-domain simulations.
This work was supported by the KAUST baseline budget.
M. Abate is with the School of Mechanical Engineering and the School
of Electrical and Computer Engineering, Georgia Institute of Technology,
Atlanta, 30332, USA: Matt.Abate@GaTech.edu.
C. Klett is with the School of Aerospace Engineering, Georgia Institute
S. Coogan is with the School of Electrical and Computer Engineering
and the School of Civil and Environmental Engineering, Georgia Institute
E. Feron is with the Department of Electrical Engineering, King Ab-
dullah University of Science and Technology, Thuwal, Saudi Arabia:
Eric.Feron@Kaust.edu.sa.
When extending to the case of linear time-varying (LTV)
systems, new cha llenges emerge: for instance, it is known
that not a ll stable LTV systems c an be certified v ia quadratic
Lyapunov functions [7], and the time-varying na ture of these
systems reduces the ease of simulation. Fur ther, analytical
considerations in simulation are often steere d by subjective
criteria: for example, the stopping-time of a simulation is, in
practice, generally chosen by either analysing the poles of
the system or the relative distance to the steady-state output
(See, e.g. [8, impulse.m]). For these reasons, it is useful to
have means other than simulation for extracting time domain
properties f or LTV systems.
The topic addressed in this paper relies on the re cent ob-
servation in [9] that the search for homogene ous polynomial
Lyapunov functions for LTV systems can be recast as the
search for quadratic Lyapunov fun ctions for a related hierar-
chy of Lyapunov differential equa tions. Indeed, every stable
LTV system induces a h omogeneous polynomial Lyapunov
function [10], [11], and the search for such a Lyapunov
function is easily expr essed as sum-of-squares and foun d
by solving a convex, semi-definite feasibility program. Our
contribution is to show that the aforementioned hierarchy
of LTI systems defines a p owerful framework for extracting
time-dom ain properties of LTV systems, a nd we particularly
show how one can compute bounds on the impulse an d step
response of LTV systems using homoge neous polynomial
Lyapunov functions.
This paper is structured as follows. We in troduce our
notation in Section II. In Section III we recall a procedure
for computing norm bounds on the impulse response of LTI
systems, and this procedure relies on the use of quad ratic
Lyapunov functions. In the same section, we introduce a
hierarchy of LTI systems that can be used to compute homo-
geneous polynomial Lyapunov functions for LTI systems. We
show how th e afor ementioned hierarchy is used to compute
bounds on the impulse responses of LTI systems in Section
IV and bo unds on the step responses of LTI systems in
Section V. Similar bounds are co mputed for LTV systems
in Section VI, and we additionally present a procedure for
computing convergence envelopes on the impulse response of
LTV systems. We demonstrate our findings through numer-
ous examples that appear througho ut the work and through
a case study presented in Section VII.
II. NOTATION
We denote by S
n
++
⊂ R
n×n
the set of symmetric positive
definite n ×n matr ices. We denote by I
n
the n ×n identity
matrix, and we denote by 0
n
∈ R
n
the zero vector in R
n
.
Given A ∈ R
n×m
and integer i ≥ 1, we denote by ⊗
i
A ∈
R
n
i
×m
i
the i
th
-Kronecker Power of A, as defined recursively
by
⊗
1
A := A
⊗
i
A := A ⊗ (⊗
i−1
A) i ≥ 2.
(1)
III. PRELIMINARIES
We consider th e linear time-invariant system
˙x = Ax + bu,
y = cx,
(2)
with state x ∈ R
n
, control input u ∈ R and output y ∈ R. We
are particularly interested in studying the impulse response
of (2), which is given by
h(t) = ce
At
b. (3)
Elementary simulations may provide desired information
such as a no rm-bound on h(t). However, such simulations
become cumbersome and inelegant when e.g. A, b, or c
are unc ertain or time-varying. To address these r obustness
issues, algebraic approaches to time-domain analyses have
been proposed that rely on quadratic Lyapunov functions [3,
Section 6.2], [12].
A quad ratic Lyapunov function for (2) is given by V (x) =
x
T
P x where P ∈ S
n
++
satisfies
A
T
P + P A 0. (4)
Indeed , any quadratic Lyapunov function for (2) implicitly
defines an ellipsoidal sublevel set
E
α
=
x ∈ R
n
and x
T
P x ≤ α
(5)
for any positive α, and this sublevel set is invariant in the
sense tha t any trajec tory of ˙x = Ax th at starts within E
α
stays within E
α
for all time. Based on this consideration, an
upper bound on the impulse response may be obtained from
any invariant ellipsoid, as we show in Proposition 1.
Proposition 1. [3] If P ∈ S
n
++
satisfies (4), then |h(t)|≤
h
for all t ≥ 0 where
h =
√
cP
−1
c
T
√
b
T
P b. (6)
Proof. Let α = b
T
P b. Then a norm bound on h(t) can be
computed by finding the point on the boundary of E
α
in the
direction c; that is |h(t)|≤
h for all t, where h is given by
h = max
z∈R
n
cz
s.t. z
T
P z ≤ b
T
P b
(7)
and this optimization problem is solved by (6).
To find the ellipsoid parameter P which minimizes the
bound on the impulse respon se while satisfying the Lyapunov
constraint (4), we formulate the program
P = arg min
Q∈S
n
++
cQ
−1
c
T
s.t. b
T
Qb ≤ 1
A
T
Q + P Q 0
(8)
which can be easily computed via convex optimization
techniques (See Exam ple 1)
1
.
Example 1. Consider the system
˙x =
0 1
−1 −0.9
x +
1
1
u, (9)
y =
√
2 −
√
2
x.
Solving (8), we have that P = (0.5)I
2
is the ellipsoid al
parameter that minimizes impulse response bound given in
(6). T hen, from (6) we find |h(t)| ≤
h = 2
√
2 for all t.
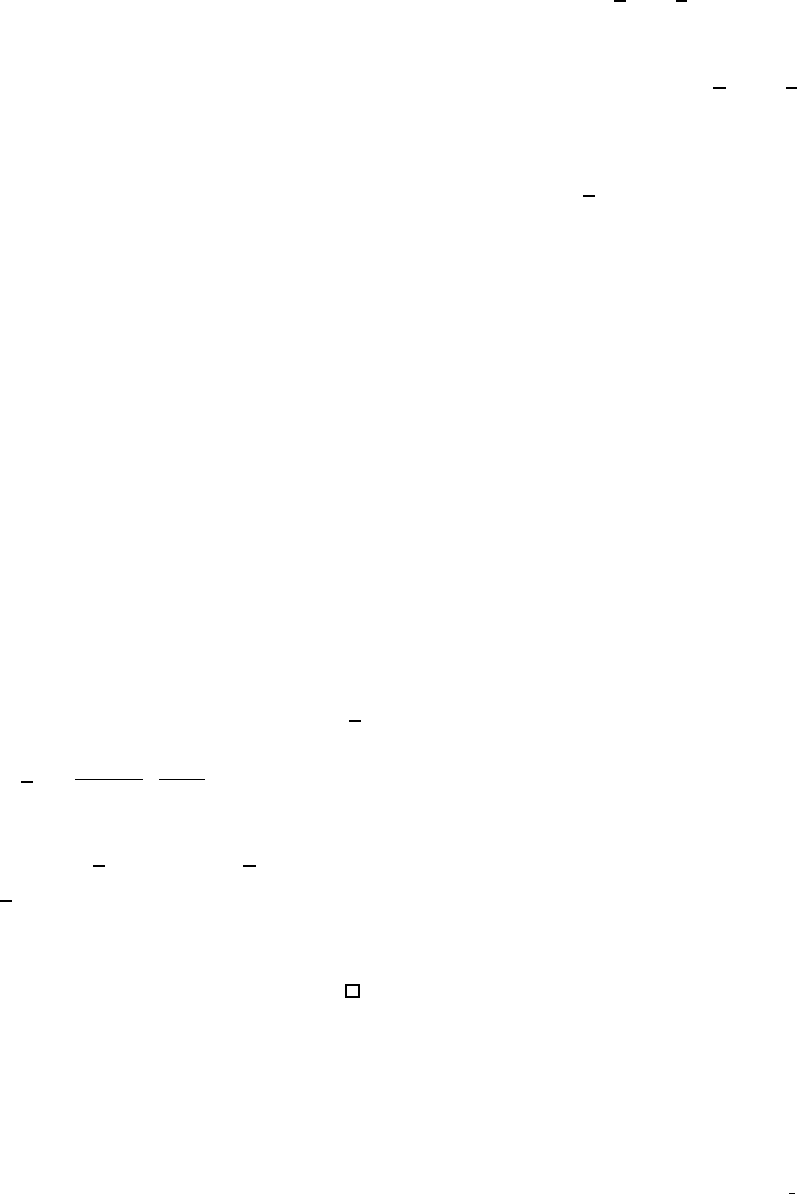
Figures 1a and 1b plot the impulse response of (9) in the
phase plane and time domain, re spectively.
The maximum impulse response of a passive system is
known to be equal to h from (6) [3], however, the norm
bound (6) generally suffers from conservatism (See Example
2).
Example 2. Consider the system (2) with stiff dynamics
(A)
i, j
=
(
−(M )
i−1
if i = j
0 otherwise,
(b)
i
= 1
(c)
i
=
(
1 if i = 1
(−1)
i+1
2 otherwise.
for some M ≥ 0. This system is stable, and |h(t)|≤ 1 for all
t ≥ 0. However, it was shown in [14] that the gap between
the actual maximum impulse response and the upper bound
obtained by solving (8) grows to 2n − 1 when M tends
toward infinity.
In this work, we a ddress the aforeme ntioned conservatism,
and we present a similar technique for generating a norm
bound on h(t) that relies on nonquadratic Lyapunov func-
tions for the system ˙x = Ax. To that end, we first define the
following infinite hierarchy o f LTI systems:
H
1
:
(
˙
ξ
1
= A
1
ξ
1
A
1
= A
H
i
:
(
˙
ξ
i
= A
i
ξ
i
A
i
= I
n
⊗ A
i−1
+ A ⊗ I
n
i−1 , i ≥ 2,
(10)
where A ∈ R
n×n
and the state of the system H
i
is given
by ξ
i
∈ R
n
i
. This hierarchy is best un derstood by looking
at H
2
, wh ic h is the vectorized version o f the Lyapunov
differential equatio n
˙
X = AX + XA
T
with X ∈ R
n×n
.
Moreover, if x(t) is a solution to ˙x = Ax then ξ
i
(t) =
(⊗
i
x(t)) is a solution to H
i
. This hierarchy is closely
tied to the Liouville equations u sed to obtain the infinite-
dimensional linear differential equations which drive the
evolution of p robability density functions, in a way similar to
1
In Example 1, and those that follow, we compute (8) using CVX [13],
a convex optimization toolbox, made for use with MATLAB. The code that
generates the figures from these examples is publicly available through the
GaTech FactsLab GitHub: https://github.com/gtfactslab/Abate
ACC2021
−2 −1 0 1 2
−1
0
1
x
1
x
2
(a) Phase portrait of the impulse response for the system (9). The
impulse response of (9) is shown i n blue, and x(0) = b is shown
as a blue dot. The vector c
T
is shown with a black arrow, and the
state along x (t) w hich maximizes h(t) is shown as a pink dot.
The invariant ell ipse E
1
is shown in red and the vector z which
solves (7) is shown as a red dot. The two dashed lines depict a
“gap” of conservatism between the bound produced by E
1
and the
actual maximum impulse response.
0 3 6 9 12
−3
−2
−1
0
1
2
3
t
h(t)
(b) Impulse response for the system (9), plotted in the time domain.
The impulse response of (9) is shown in blue, and the magnitude
bound
h = 2
√
2 is shown in red.
Fig. 1: Example 1. Figures 1a and 1b plot the impulse
response of the system (9) in the phase plane and time
domain, resp e ctively.
the Chapman-Kolmogorov equations [15, Chapter 16]. See
also [16] for the discrete-tim e parallel to (10).
An essential observation made in [9] is that a quadratic
Lyapunov function for the i
th
level system H
i
identifies a
homogeneous polynomial Lyapunov fu nction for ˙x = Ax;
that is, if P
i
∈ S
n
i
++
satisfies
A
T
i
P
i
+ P
i
A
i
0 (11)
for A
i
as defined in (10), then a polynomial Lyapunov
function for the system ˙x = Ax is given by
V (x) = (⊗
i
x)
T
P
i
(⊗
i
x) (12)
and this Lyapunov function is homogen e ous in the entries of
x and is of order 2i.
IV. IMPULSE RESPONSE ANALYSIS VIA HOMOGENEOUS
POLYNOMIAL LYAPUNOV FUNCTIONS
Our main result is to show that the impulse response
bound on h(t), which is provided in Proposition 1, can
be considerably improved when hig her-order polynomial
Lyapunov functions are consid ered. I n particular, we study
the guaran te e s attainable when considering th e h omogeneous
polynomial Lyapunov functions that naturally arise from the
hierarchy of stable LTI systems (10), and we show in the
following theorem how these Lyapunov functions are used
to b ound the impulse response h (t).
For integer i ≥ 1, define b
i
∈ R
n
i
and c
T
i
∈ R
n
i
by
b
i
= ⊗
i
b, c
i
= ⊗
i
c.
Theorem 1. If P
i
∈ S
n
i
++
satisfies (11) at the i
th
level, then
|h(t)| ≤
h for all t where
h = (c
i
P
−1
i
c
T
i
)
1/(2i)
(b
T
i
P
i
b
i
)
1/(2i)
. (13)
Proof. For any integer i ≥ 1, construct the system
˙
ξ = A
i
ξ + b
i
u
y = c
i
ξ
(14)
with ξ ∈ R
n
i
, u ∈ R, and impulse response h(t). Assuming
P
i
∈ S
n
i
++
satisfies (11) at the i
th
level, we have that
|h(t)|≤ (c
i
P
−1
i
c
T
i
)
1/2
(b
T
i
P
i
b
i
)
1/2
. Moreover, f rom the
construction (14), we have that |h(t)|≤ |h(t)|
1/i
=
h. Th is
competes the proof.
As in (8), we next formulate a convex program to search
for the parameter P
i
which provides the tightest upper bound
on h(t) attainable using Theorem 1:
P
i
= arg min
Q∈S
n
i
++
c
i
Q
−1
c
i
T
s.t. b
i
T
Qb
i
≤ 1
A
T
i
Q + QA
i
0.
(15)
We demonstrate the application of Theorem 1 in Example 3.
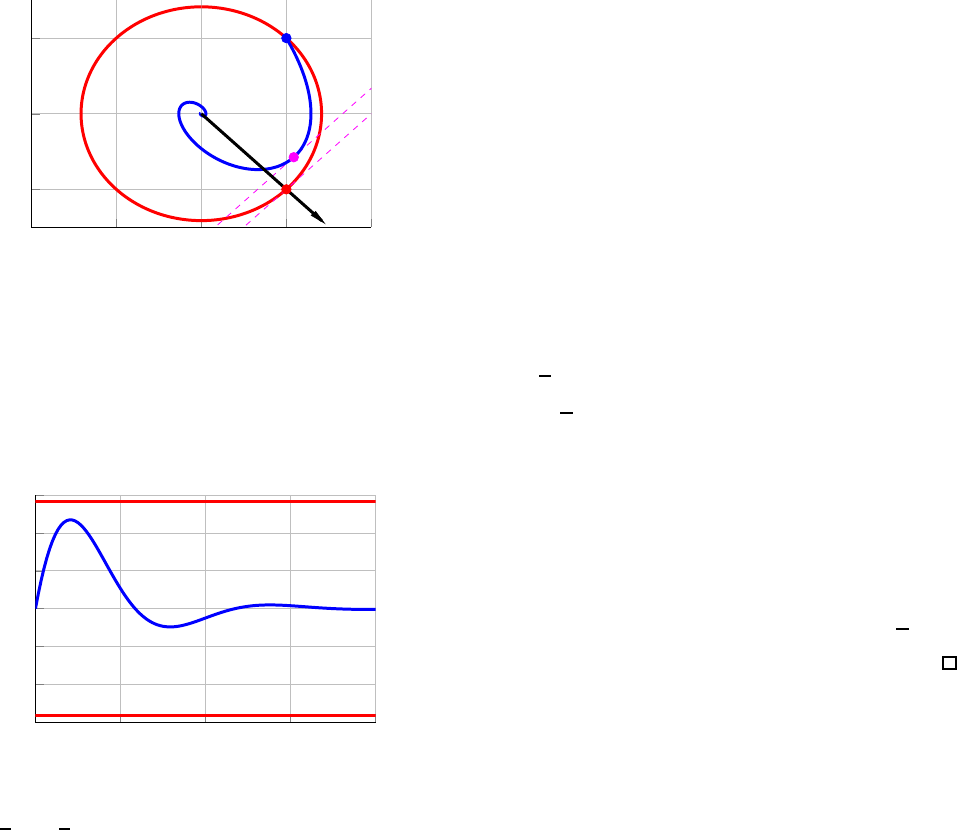
Example 3. We consider the stiff system, previously pre-
sented in Example 2, where we take n = 2 and M = 100.
The optimization pro blem (15) is solved for i = 1, 2, 5,
and the resulting qu adratic Lyapunov parameters P
i
are used
to generate bounds on the impulse response using (13). In
Figure 2, we show the impulse response of the stiff system
and the bounds derived using Theorem 1. Note that as the
degree of the Lyapunov functions grows, the sublevel sets
of the resulting Lyapunov function shrink and approximate
the relevant parts of the impulse response trajectory in the
state-space with greater accur a cy.
As illustrated in Example 3, the accuracy of the bound
(13) will generally increase as i increases. This is due to the
fact that the homogeneou s polynomial Lyapunov functions
generalize quadratic Lyapunov functions [9].
Theorem 1 can also be used to reduce the simulation
complexity for systems of the fo rm (2). While it is nat-
ural to analyse such systems though simulation, it c an be
−2 −1 0 1 2
−1
0
1
x
1
x
2
(a) Phase portrait of the impulse response for the stiff system
from Example 2 where n = 2 and M = 100. The impulse
response is shown in blue, and x(0) = b is shown as a blue dot.
A vector in the direction of c
T
is shown with a black arrow. The
invariant sublevel sets of the 2
nd
, 4
th
and 10
th
order homogeneous
polynomial Lyapunov functions that are derived in this study are
shown in red, orange and green, respectively.
0
5 ·10
−2
0.1
−2
−1
0
1
2
t
h(t)
(b) Impulse response for the system (9), plotted in the time domain.
The impulse response of (9) is shown in blue, and the magnitude
bounds derived using P
i
for i = 1, 2, 5 are shown in red, orange
and green, respectively. As t goes to infinity, h(t) decays to 0.
Fig. 2: Example 3. Figures 2a and 2b plot the impulse
response of the stiff system from Example 2, where n = 2
and M = 100.
ambiguous as whe n a simulation should be stopped. I n the
following example, we demonstrate one potential solution to
this problem, wh ereby a system is simulated over a given
amount of time and then the remaining simulation output is
bounded using (13).
Example 4. Consider the system (2) with x ∈ R
3
and
A =
0.3 0.5 10
−1 −1.7 1
−2 −2 −7.7
, b =
0.2
1
1
, c
T
=
1
−2
2
.
The optim ization problem (15) is solved for i = 1, 4, and
the resulting Lyapunov para meters P
i
are used to generate
bounds on the impulse response using (13). At time t = 1, a
new bound is computed via (13) wh e re b is now taken to be
the simulated state x(1); this creates a norm bound on the
tail of the impulse response, as shown in Figur e 3.
0 1 2
−1
−0.5
0
0.5
1
t
h(t)
Fig. 3: Example 4. The impulse response h(t) is shown in
blue, and the magnitu de bounds derived using P
1
and P
4
are shown in red and green, respectively. At time t = 1, a
bound on the tail of h(t) is computed via (13) with i = 1,
and this bound is shown in red.
V. STEP RESPONSE ANALYSIS VIA HOMOGENEOUS
POLYNOMIAL LYAPUNOV FUNCTIONS
We next turn our discussion to the step response of (2),
which is the output y(t) w hen x(0) = 0
n
and u(t) = 1 for
all t ≥ 0. Equivalently, the step response of (2) is given by
s(t) where
˙x = Ax + b
s = cx
(16)
and x(0) = 0
n
, and a closed form representation of the step
response is given by
s(t) = cA
−1
(e
At
− I
n
)b. (17)
As we show next, a norm bound on s(t) can be de rived
using Lyapunov functions in manner similar to that pr esented
previously. For integer i ≥ 1, define A
i
∈ R
n
i
×n
i
by
A
i
= ⊗
i
(A
−1
).
Theorem 2. If P
i
∈ S
n
i
++
satisfies (11) at the i
th
level, then
|s(t) + cA
−1
b| ≤
s for all t wh e re
s = (c
i
P
−1
i
c
T
i
)
1/(2i)
(b
T
i
A
T
i
P
i
A
i
b
i
)
1/(2i)
. (18)
Proof. The system (16) has a stable equilibrium x
eq
=
−A
−1
b. Taking the tran sformation ex(t) = x(t) − x
eq
, we
find that the step response of (2) is equal to the impulse
response of the system
˙
ex = Aex + A
−1
bu
y = cex − cA
−1
b.
(19)
Thus, the bound (18) is derived using The orem 1.
Using sim ilar reason ing to that of (8), we find that the
Lyapunov parameter P
i
that provides the tightest upper
0 2 4 6
−0.5
0
0.5
1
t
h(t)
Fig. 4: Example 5. Th e step response s(t) is shown in blue,
and the magnitude bounds derived u sing the P
i
for i = 1, 3
are shown in red and green, respectively. At time t = 1, a
new bound is computed via (1 8) using i = 1 and this bou nd
is shown in red.
bound on |s(t)+cA
−1
b| attainable using Theorem 2 is given
by
P = arg min
Q∈S
n
i
++
c
i
Q
−1
c
i
T
s.t. b
T
i
A
T
i
QA
i
b
i
≤ 1
A
T
i
Q + QA
i
0.
(20)
We demonstrate the application of Theorem 2 in Example 5.
Example 5. Consider the system (2) with x ∈ R
3
and
A =
−1 0 2
0 −10 1
0 −2 −1
, b =
−2
1
1
, c
T
=
1
−2
2
.
The optim ization problem (20) is solved for i = 1, 3, and
the resulting Lyapunov para meters P
i
are used to generate
bounds on the step response using (18). At time t = 4, a
new bound on th e step response is computed v ia (18), and
this creates a norm bound on the tail of s(t), as shown in
Figure 4.
VI. IMPULSE RESPONSE ANALYSIS FOR LINEAR
TIME-VARYING SYSTEMS
The foregoing ideas can be used over a range of po ssible
applications going beyond the ana lysis of a single LTI sys-
tem. Lyapunov functions have long been known to be useful
for robustness analyses, and we explore these applications in
this section.
A. Bounds on Impulse Response for Uncertain and Nonlin-
ear Systems
The foregoing bounds on impulse re sponse can be rea dily
extended to the case of linear time-varying input-o utput
systems. Spec ifica lly, we consider
˙x = A(t)x + bu,
y = cx,
(21)
where for given A, ∆ ∈ R
n×n
, we have that
A(t) ∈
n
A + λ∆ |λ ∈ [−1, 1]
o
(22)
for all t. In this case, the impulse response h(t) is described
parametrica lly b y a solu tion ϕ(t) to
˙ϕ(t) = A(t)ϕ(t)
h(t) = cϕ(t)
ϕ(0) = b.
(23)
Theorem 3 shows how a norm bound on h(t) for (21) can
be similarly computed b y considering the hierarchy (10).
Theorem 3. If P
i
∈ S
n
i
++
satisfies (11) for A+∆ and A−∆
at the i
th
level, then |h(t)| ≤
h for all t where h is given
by ( 13). Moreover, the parameter P
i
which minimizes h can
be computed with (8), where P
i
is understood to satisfy (11)
for both A + ∆ and A − ∆ at the i
th
level.
Proof. Assume there exists a P
i
∈ S
n
i
++
that satisfies (11) for
both A+∆ and A−∆ at the i
th
level. Then, the system ˙x =
A(t)x is stable with a homogeneous polynomial Lyapunov
function V (x) = (⊗
i
x)
T
P
i
(⊗
i
x) [9]. Therefore |h(t)| ≤
h, where h(t) is the impulse response of (21) and h the a
point on the level set {x ∈ R
n
|V (x) = b
T
i
P
i
b
i
} in the
direction c
T
. It follows from the reaso ning presented in the
proof of Theorem 1 that
h is given by (13). This completes
the proof.
The stability guarantees in Theorem 3 are in terms of a
global norm bound on h(t). We next generalise Theo rem
3 to provide a time-dependent bound on h(t) which is
exponentially growing/decaying in t (See Theorem 4).
Theorem 4. For α ∈ R, if P
i
∈ S
n
i
++
satisfies (11) for
A +∆+αI
n
and A−∆+αI
n
at the i
th
level, then |h(t)| ≤
e
−αt
h for all t where h is g iv e n by (13).
Proof. Choose α ∈ R, and assume there exists a P
i
∈ S
n
i
++
that satisfies (11) for both A +∆+αI
n
and A−∆+αI
n
at the
i
th
level. Then, V (x) = (⊗
i
x)
T
P
i
(⊗
i
x) is a homogeneous
polynomial Lyapunov functio n f or the system
˙x = A
α
(t)x. (24)
where A
α
(t) ∈ R
n×n
evolves according to
A
α
(t) ∈
n
A + αI
n
+ λ∆
λ ∈ [−1, 1]
o
. (25)
Thus, applyin g the results of Theorem 3, we have that the
impulse response of
˙x = (A(t) + αI
n
)x + bu
y = cx
(26)
is bounded by
h fr om (13).
Fix an A(t) satisfying (22), and denote by ϕ(t) ∈ R
n
,
h(t) ∈ R the solutio n to (23). Then ϕ
α
(t) := e
αt
ϕ(t) is the
solution to
˙ϕ
α
(t) = (A(t) + αI
n
)ϕ
α
(t)
ϕ
α
(0) = b.
(27)
0 5 10
−1
0
1
t
h(t)
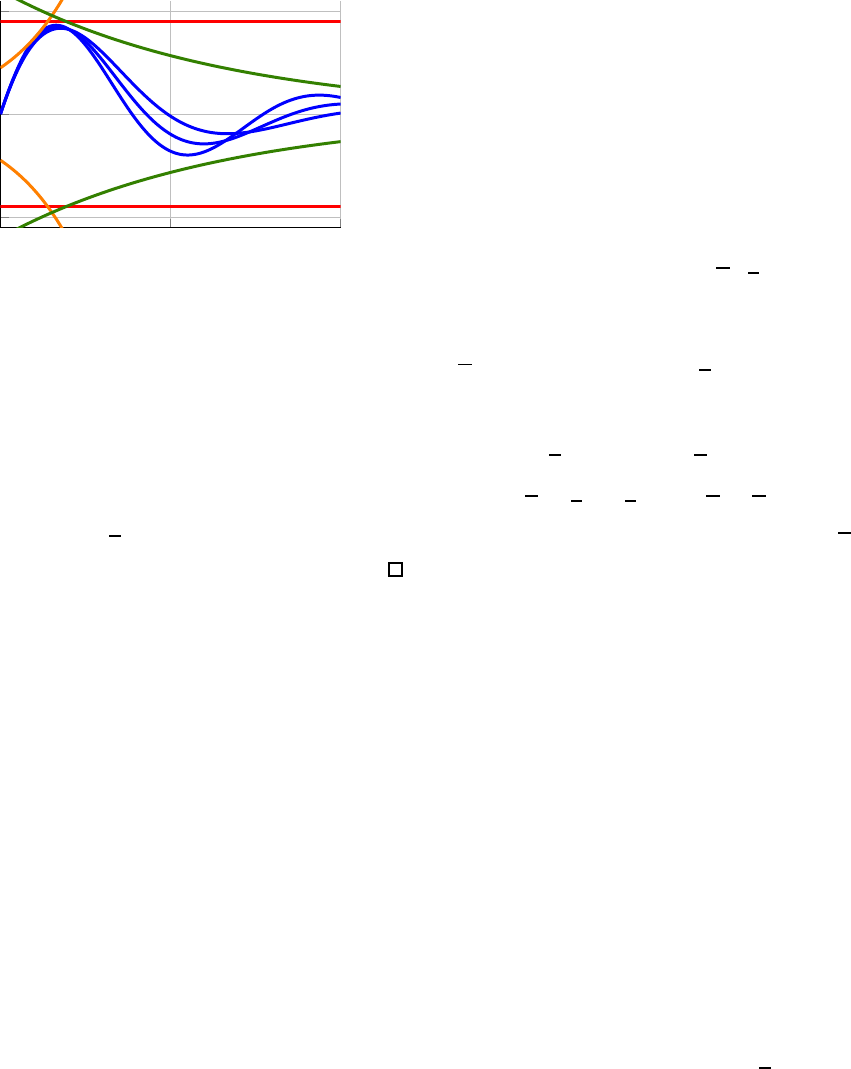
Fig. 5: Example 6. Thre e system simulations are conducted,
and the impulse responses of each is plotted in blue. A global
norm bound on h(t) is computed using Theorem 3 for i = 6,
and this bound is shown in red. Two exponential bounds on
h(t) are constructed fro m Theorem 4 with α = −0.5, 0.15
and i = 6, and the boun ds are shown in oran ge and gree n,
respectively.
Therefore |h(t)| ≤ e
−αt
h for all t. This completes the proof.
We demonstrate application of Theorems 3 and 4 in
Example 6.
Example 6. Consider the uncertain system (21) with x ∈ R
2
,
and
A =
0 1
−0.6 −0.5
,
b
T
=
0 1
,
∆ =
0 0
0.1 −0.1
,
c =
1 0
.
(28)
The optimization problem (2 0) is solved for i = 6 and
the resulting Lyapun ov parameters P
6
are used to generate
bounds on the impulse response using (13). Next, Theorem
4 is employed, and exponential stability guarantees are
computed for α = −0.5 , 0.15 and i = 6. The expo nential
and global norm bounds compu ted in this study are shown
in Figure 5 in the tim e domain, along with several sample
system impulse responses.
B. Robust Uncertain System Simulation
As demonstrated in the previous example s, the b ound
provided in (13)—which is introduced in Theorem 1 and
generalised in Theorem 3—will generally only serve as a
good approximation of the sy stem response initially. Thus,
the bound provided in (13) may be too weak to employ in
instances where, e.g., long-term system knowledge is neede d,
and we have attempted to address this concern by providing
e.g. norm- bounds on the tail of the impulse response (See
Examples 4 and 5), and exponential stability bounds (See
Theorem 4 and Example 6). As an alternative, we next
present a method for approximating h(t) for (21) that uses
the difference between the impulse responses within a family
of linear systems.
We consider
˙
ex =
A(t) 0
0 A
ex +
b
b
u,
y =
c −c
ex,
(29)
and where A(t) satisfies (22). Given a signal A(t), we have
that the impulse response of (29) is equal to h(t) − ce
At
b
where h(t) is the im pulse re sponse of (21) and is given by
(23). Th us, a new tim e varying bound on h(t) can be d erived
straightfor ward ly from the results presented previously (See
Theorem 5).
Define A
+
, A
−
∈ R
2n×2n
, and
b
i
, c
T
i
∈ R
(2n)
i
by
A
+
=
A + ∆ 0
0 A
, A
−
=
A − ∆ 0
0 A
,
b
i
= (⊗
i
1 1
)
T
⊗ b, c
i
= (⊗
i
1 −1
) ⊗ c.
Theorem 5. For α ∈ R, if P
i
∈ S
(2n)
i
++
satisfies (11) for
A
+
+ αI
2n
and A
−
+ αI
2n
at the i
th
level, then |h(t) −
ce
At
b| ≤ e
−αt
h for all t where h is g iv e n by
h = (c
i
P
−1
i
c
T
i
)
1/(2i)
(b
T
i
P
i
b
i
)
1/(2i)
. (30)
Moreover, the pa rameter P
i
which minimizes
h can be
computed with (8), where P
i
is understood to satisfy (11)
for both A
+
+ αI
2n
and A
−
+ αI
2n
at the i
th
level.
The applicatio n of Theorem 5 is demonstrated through a
case study in th e following section.
VII. NUMERICAL EXAMPLE
In this study we consider the uncertain linear system (21)
previously introduced in Example 6, and restated here: we
consider (21) with x ∈ R
2
and
A =
0 1
−0.6 −0.5
,
b
T
=
0 1
,
∆ =
0 0
0.1 −0.1
,
c =
1 0
.
(31)
We first consider the case where α = 0. We compute P
1
and P
3
that satisfies the hypothesis of Theor em 5 using (8).
By applying Theorem 5, we compute an envelope centered
at ce
At
b which contains the impulse response of ( 21). The
bounds computed in this study are shown in Figure 6, plotted
in the time domain.
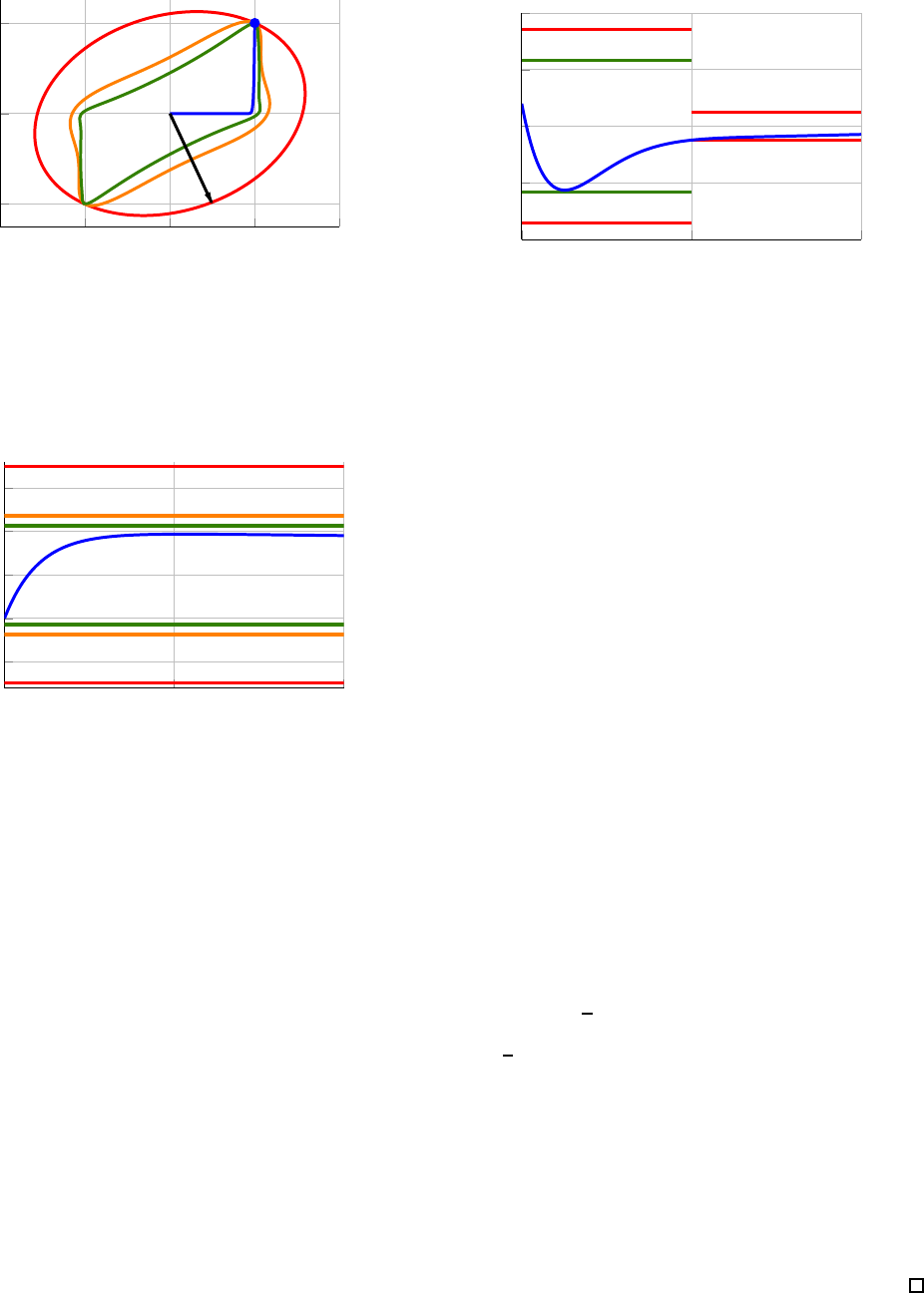
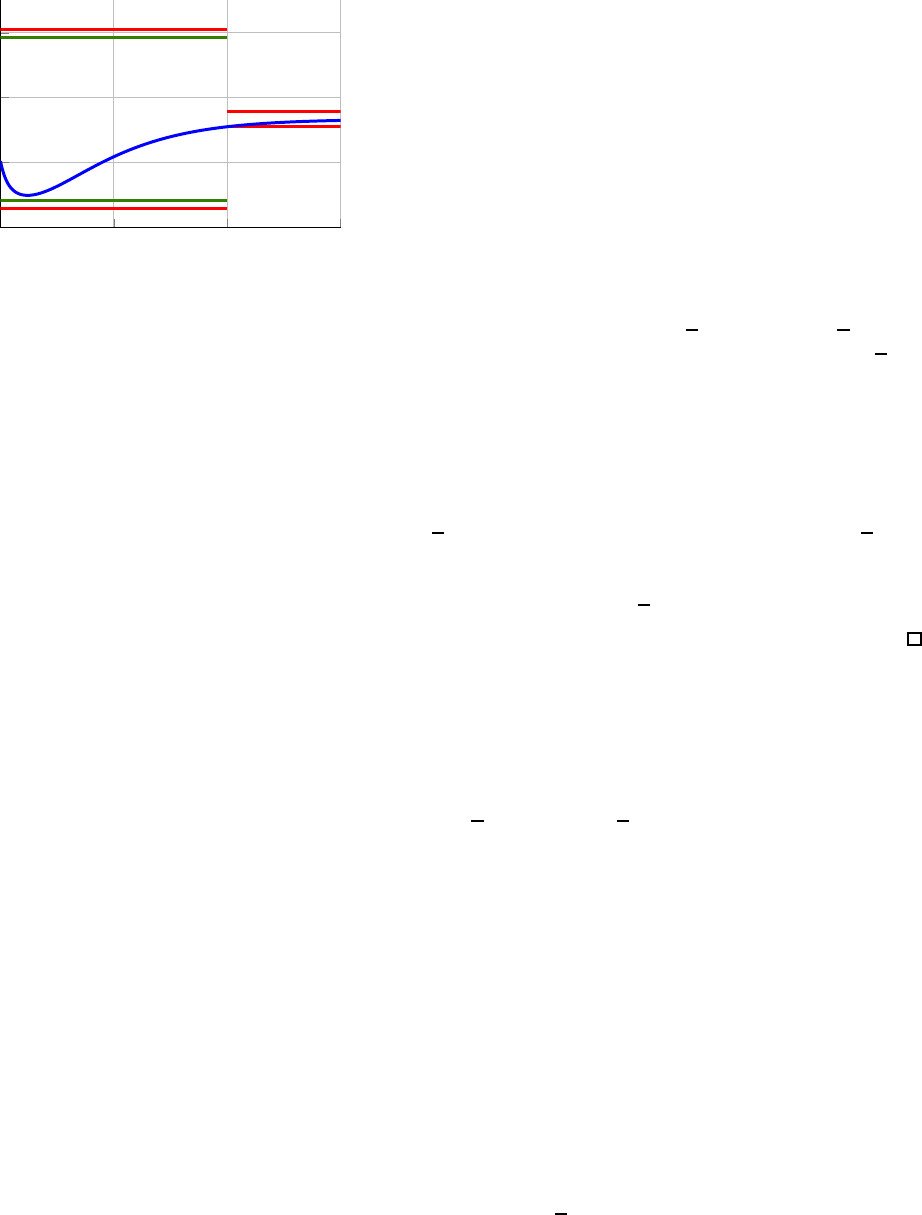
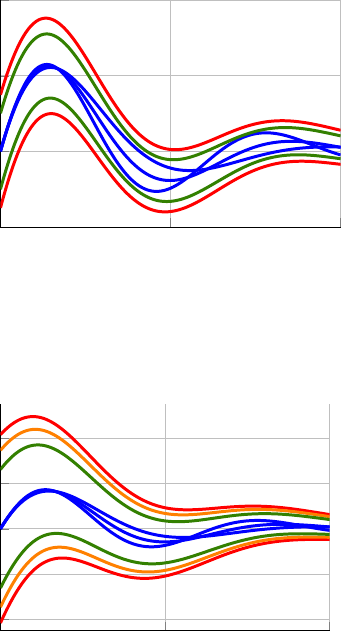
We next con sid er the case where α < 0. I n this case, the
envelope
|h(t) − ce
At
b| ≤ e
−αt
h, (32)
that bounds the impulse response h(t) will grow with
time. We demonstrate this assertion by computing P
2
∈
R
(2n)
2
that satisfies the hypothesis of Theorem 5 for α =
−0.25, −0.5, −1, and plotting the re sulting convergence en-
velopes (See Figure 7). Note that as α decreases the envelope
bound (32) will approx imate the in itial system behavior with
greater accuracy; however, the long-ter m accuracy is better
achieved with higher values α.
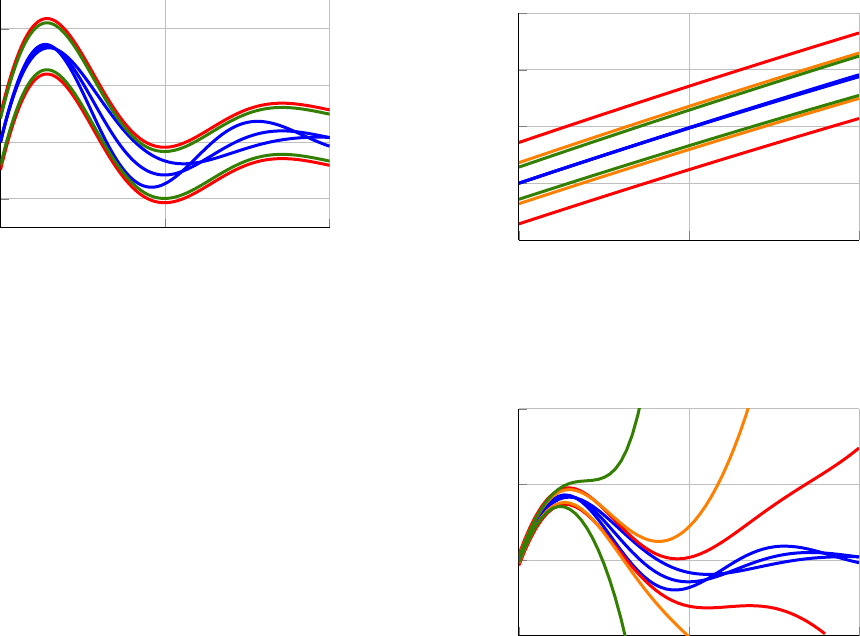
Finally, we consider the case wh e re α > 0 and, in
this case, the resulting envelope (32) will shrink with time.
Moreover, this bound will converge more quickly when α is
0 6 12
−0.5
0
0.5
1
t
h(t)
Fig. 6: Three system simulations are conducted, and the
impulse responses of each is plotted in blue. Two envelope
bounds on h(t) are computed using Theorem 5 with α = 0
and i = 1, 3, and these envelope bounds are shown in r ed
and green, respectively.
large and this bound will increase in accuracy as the order
of the search i inc reases. To demonstrate this assertion we
compute P
i
that satisfies the hypoth e sis of Theorem 5 for
α = 0.1 at the levels i = 1, 3. The resulting convergence
envelopes are shown in Figu re 8a; note that as i increases,
the bound (32) approximates the true maximum impulse
response of (21) with gr eater ac curacy. Additionally, we find
that as the order of the search i increases, higher α values
are possible. For instance, when searching for a quadratic
Lyapunov parameter P
1
that satisfies the hypothesis of The-
orem 5, the optimization problem (8) is solvable only when
α ≤ 0.156. However, at the i = 2 level the optimization
problem (8) is solvable for α ≤ 0.169, and at the i = 3 level
the optimization problem ( 8) is solvable for α ≤ 0.173. The
envelope bounds derived from these maximum α parameters
are shown in Figure 8b.
VIII. CONCLUSION
This work demonstrates how the more general class of
homogeneous polynomial Lyapunov functions can be used to
approximate p oint-wise-in-time behavior for LT V systems,
and we particularly study the im pulse and step response
of these systems. Our findings rely on the recent observa-
tion that the search for homogeneous polynomial Lyapunov
functions for LTV systems can be recast a s a sear ch for
quadra tic Lyapunov functio ns for a related h ie rarchy of time-
varying Lyapunov differential equations; thus, performance
guaran tees for LTV systems are attainable without heavy
computation. Num erous examples are provided to demon-
strate the findings of this work.
REFERENCES
[1] H. K. Khalil and J. W. Grizzle, Nonlinear systems, vol. 3. Prentice
hall Upper Saddle River, NJ, 2002.
[2] W. J. Terrell, Stability and stabilization: an introduction. Princeton
University Press, 2009.
[3] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear matrix
inequalities in system and control theory. SIAM, 1994.
0 0.1 0.2
−0.1
0
0.1
0.2
0.3
t
h(t)
(a) Short time scale: as α ≤ 0 decrease, the envelope bound (32)
approximates the impulse response of (21) with greater accuracy
on short time horizons.
0 6 12
−1
0
1
2
t
h(t)
(b) Long time scale: as α ≤ 0 increases, the envelope bound (32)
approximates the impulse response of (21) with greater accuracy
on long time horizons.
Fig. 7: Three system simulations are conducted an d the
impulse response of each is plotted in blue. Three conference
envelopes are formed by applying the procedu re detailed in
Theorem 5 at level i = 2. We compute P
2
∈ R
16
using (8)
for α = −0.25, −0.5, −1, and the resulting envelope bounds
(32) are shown in red, orange and green, respectively.
[4] K. Zhou and J. C. Doyle, Essentials of robust control, vol. 104.
Prentice hall Upper Saddle River, NJ, 1998.
[5] C. Hollot and B. Barmish, “Optimal quadratic stabilizability of uncer-
tain linear systems,” in Proc. 18th Allerton Conf. on Communication,
Control and Computing, pp. 697–706, University of Illinois, 1980.
[6] F. Blanchini, “Nonquadratic lyapunov functions for robust control,”
Automatica, vol. 31, no. 3, pp. 451–461, 1995.
[7] D. Liberzon, Switching in systems and control. Springer Science &
Business Media, 2003.
[8] MATLAB, version 9.8 (R2020a). Natick, Massachusetts: The Math-
Works Inc., 2020.
[9] M. Abate, S. Coogan, and E. Feron, “Lyapunov differential equation
hierarchy and polynomial lyapunov functions for switched linear
systems,” in 2020 American Control Conference, pp. 5322–5327,
IEEE, 2020. An extended version of this work appears on ArXiv:
https://arxiv.org/abs/1906.04810.
[10] P. Mason, U. Boscain, and Y. Chitour, “Common polynomial lyapunov
functions for linear switched systems,” SIAM journal on control and
optimization, vol. 45, no. 1, pp. 226–245, 2006.
[11] A. A. Ahmadi and P. A. Parrilo, “Converse results on existence of
sum of squares lyapunov functions,” in 2011 50th IEEE conference
0 6 12
−0.75
0
0.75
1.5
t
h(t)
(a) Three envelope bounds are formed by applying the procedure
detailed in Theorem 5 at levels i = 1, 3 with α = 0.1. These
bounds are shown in red and green, respectively.
0 6 12
−2
−1
0
1
2
t
h(t)
(b) Three envelope bounds are formed by applying the procedure
detailed in Theorem 5. The i = 1
st
order envelope bound formed
by solving (8) with α = 0.156 is shown in red. The i = 2
nd
order
envelope bound formed by solving (8) with α = 0.169 is shown
in orange. The i = 3
rd
order envelope bound formed by solving
(8) with α = 0.173 is shown in green.
Fig. 8: Three system simulations are conducted an d the
impulse response of each is plotted in blue. Convergence
envelopes are formed by applying the procedu re detailed in
Theorem 5 at level i = 1, 2, 3 for α ≥ 0.
on decision and control and European control conference, pp. 6516–
6521, IEEE, 2011.
[12] J. Abedor, K. Nagpal, and K. Poolla, “A linear matrix inequality
approach to peak-to-peak gain minimization,” International Journal of
Robust and Nonlinear Control, vol. 6, no. 9-10, pp. 899–927, 1996.
[13] M. Grant and S. Boyd, “CVX: Matlab software for disciplined convex
programming, version 2.1.” http://cvxr.com/cvx, Mar. 2014.
[14] E. Feron, “Linear matrix inequalities for the problem of absolute
stability of control systems,” 1994.
[15] G. J. Lieberman and F. S. Hillier, Introduction to operations research.
McGraw-Hill, 8 ed., 2004.
[16] C. Klett, M. Abate, Y. Yoon, S. Coogan, and E. Feron, “Bounding
the state covariance matrix for switched linear systems with noise,” in
2020 Am erican Control Conference, pp. 2876–2881, IEEE, 2020.
