
The Virtual Motion Controller:
A Sufficient-Motion Walking Simulator
Maxwell J. Wells, Barry N. Peterson, Jason Aten
Human Interface Technology Laboratory
Seattle, WA 98195
e mail [email protected]
Abstract
A device is described for simulating pedestrian movement in virtual reality. The
device is based on the concept of “sufficient motion,” in which the simulator
affords just enough movement in the real world to create a sense of reality in the
virtual world. The paper describes the concept, and discusses some
preliminary results obtained with a proof-of-concept device. A section on
requirements lists and discusses seven features of a walking simulator. We
conclude with a description of our future work.
1. Introduction
The predominant means for maneuvering through virtual environments is by controlling
vehicles. These vehicles range from the very simple, like a bicycle, to the very complex,
like an F15 aircraft. In some instances, these vehicles are the most appropriate method of
transportation. Indeed, it is often the case that the purpose of the virtual environment is to
train for competence in the control of the vehicle in the real environment.
However, there are many other instances where vehicles are not appropriate. In particular,
for cases in which a participant would normally walk through a real environment, having to
control a vehicle through the equivalent virtual environment can detract from the
effectiveness of the simulation. The need to focus on the interface rather than the task
could use cognitive resources which would be best used for other tasks. For these
applications there is a need for a walking simulator. Example applications are infantry
training and some VR games.
2. Requirements
We have identified seven requirements of a locomotion simulator, and they are discussed
below. This list is not meant to be exhaustive.
2.1. Involvement of the Body
By far the most natural and intuitive method for locomoting through virtual environments is
by walking through them, which involves using the legs and body as the controllers. This
leaves the hands free to perform other tasks. It is also reasonable to assume that the natural
involvement of the body may lead to an enhanced sense of presence, better spatial
awareness and better navigation performance.
2.2. Axes of Motion
A pedestrian in the real world usually moves in two translational axes (x and y), and in one
rotational axis (yaw). The direction in which the body is pointing may be different from
the direction of movement. Most pedestrian movement in the z-axis (vertical movement) of
any magnitude is accomplished by moving along (x- or y-axis motion) a platform or stairs,
or by climbing something.
2.3. Hands Free
There are numerous techniques for moving through virtual environments which use the
hands for "fly-throughs." Fly-throughs generally require the participant to use some sort
of hand-controlled device (a wand or a DataGlove). Typically the participant will point his
head or hand in the intended direction of travel and push a button to initiate movement.
Another technique uses hand-held miniatures of the environment which the person uses to
“transport” themselves, or fly from place to place (Pausch et al, 1995). The problems with
fly throughs are: 1) it is an unnatural form of locomotion. As Gibson (1958) points out,
humans are not equipped to judge distances through the air. 2) It occupies the hands and
therefore interferes with their use for other activities.
2.4. Intuitive and Natural
A distinction is being made between intuitive (i.e. easy to learn) and natural (i.e. the
technique used in the virtual environment is similar to the technique used in the real world).
A walking interface operated with the hands may be intuitive but not natural. Using a new
method of hand writing for a pen-based computer is natural but not intuitive. An ideal
interface would be both intuitive and natural.
2.5. Multiple Postures
Upright bipedal locomotion is the most energy efficient and widely used method. However
there are occasions when other postures may be adopted. These include crawling,
bending, kneeling etc. A locomotion simulator should allow all of these variants in as
natural a way as possible.
2.6. Feedback
Feedback refers to information provided to the user about their input to the system, and
how that input affects the system. Exertion is one form of feedback. Exertion may be
important in a locomotion simulator because it is known that varying the effort required to
move through an environment changes the perception of the size of that environment
(Reiser et al 1995) . Exertion is also important in some training applications (but, as we
will argue later, its role in simulation is less clear) because of the need for transfer of
training. For example, infantry duty in the real world is associated with extreme exertion.
Unless personnel are trained under these conditions their performance will fall apart in
combat (poor transfer of training).
2.7. Volume of Motion
One of the requirements of working in a virtual environment is that the volume of
movement of the participant in the real world must be restricted. This is easy to do for a
vehicle, but more challenging for a pedestrian. The volume constraint is essential because
of equipment tethers and tracking ranges. Even without these surmountable technological
barriers, there are more immutable real-world barriers, like walls and furniture.
Techniques for constraining the volume of the pedestrian motion, to match the restricted
working volume, have included treadmills, and combinations of a treadmill with some sort
of steering device (e.g. UNC's steerable treadmill (Brooks, 1992), Sarcos' Treadport
(Pratt, 1996). Another approach is to put infantrymen on stationary unicycles, or
Uniports, where the effort of walking is simulated by pedaling (Pratt, 1996). Slater et al
(1995) had participants walk on the spot, and transformed their rate and amplitude of up
and down (z-axis) motion into motion through the virtual world. A technique reported by
Iwata (1996) uses a system of special roller skates and a waist-high frame firmly attached
to the floor which surrounds the participant. Motion of the participants feet as they push
against the frame are transduced with the special skates and used to drive the motion of the
virtual world.
Given the above requirements, it would seem that the ideal interface would be some type
of 360 degree treadmill. However our analysis of this type of approach leads us to
conclude that this would be difficult and expensive to produce, and may be unsafe in some
situations (to overcome inertia the system must use, and the user must be coupled to,
several horsepower). Furthermore there are less expensive alternatives which could
provide many of the advantages and none of the disadvantages associated with other
techniques. The disadvantages include difficulty in maneuvering with a treadmill, the
inability to adopt multiple postures with a stationary unicycle, and the lack of naturalness
when walking on a frictionless surface.
3. The concept of sufficient motion
One alternative involves the concept of “sufficient motion.” A sufficient motion simulator
allows enough motion in the real world to create a sense of presence and realism in the
virtual world. In contrast, a 360 degree treadmill would represent a “full motion”
simulator.
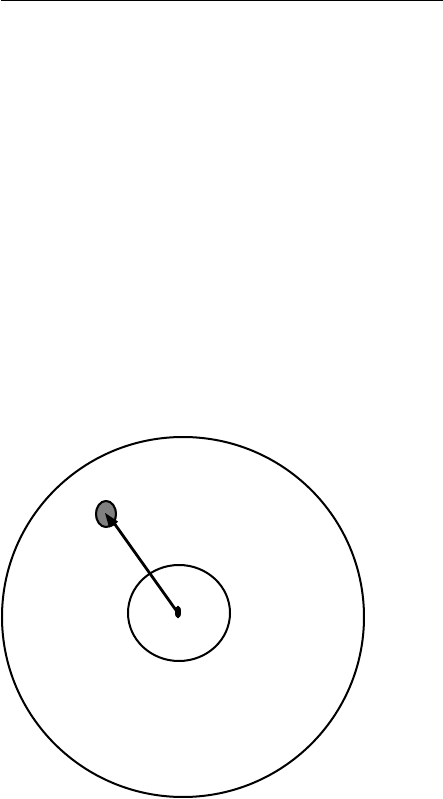
A physical work area (shown as a circle in Figure 1) is defined, with some predefined
center. The physical distance between the participant's body and the center of the circle,
and the angle of a line joining those two points is determined. The length of the line is used
to determine the magnitude of some derivative of displacement (e.g. velocity or
acceleration). The angle of the line is used to determine the direction of that derivative.
Within a predefined distance from the center, the derivative (velocity will be used in the
example) is ignored in favor of an absolute displacement mapping. This allows users fine
control over the position within a small work volume. Figure 2 illustrates a linear
relationship; however there may be others.
center
minimum
distance
body
location
working
area
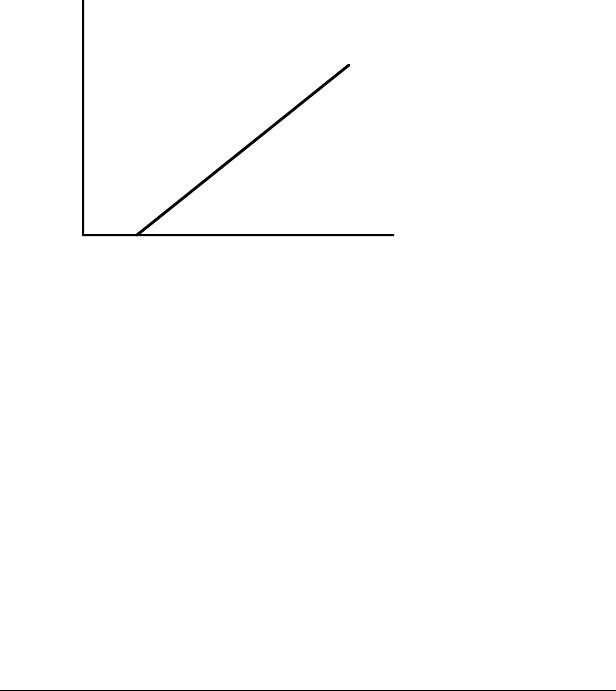
Figure 1. The magnitude and direction of the line from the center to the body location are
used to control motion through the virtual environment.
displacement from center (inches)
velocity
(inches/
sec)
minimum
distance
Figure 2. Graph of velocity vs. displacement from center.
In order to provide some feedback to the user about their position on the working surface,
it is proposed that the surface be overlaid on a large bowl, or similarly concave shape of
suitable size. Thus, the user would be able to find the center (the flat section) of the bowl
without having to look. Other methods of feedback are also possible.
The functional components of a sufficient motion simulator are: a means of tracking the
user’s position; movement rules, pertaining to the control order and zones, the transitions
between control orders and the tuning of the algorithms; feedback about the user's input to
the system.
4. One embodiment: the Virtual Motion Controller
One embodiment of the sufficient motion concept is called the virtual motion controller
(VMC). A proof of concept was constructed. It consisted of a waistbelt suspended at
waist-height by elastic straps. The other ends of the elastic straps were connected to a
circular frame which was free to pivot about the center of the working volume (see Figure
3). Feedback to the user was implemented through the force from the set of elastic straps.
The force increased as displacement from center increased.
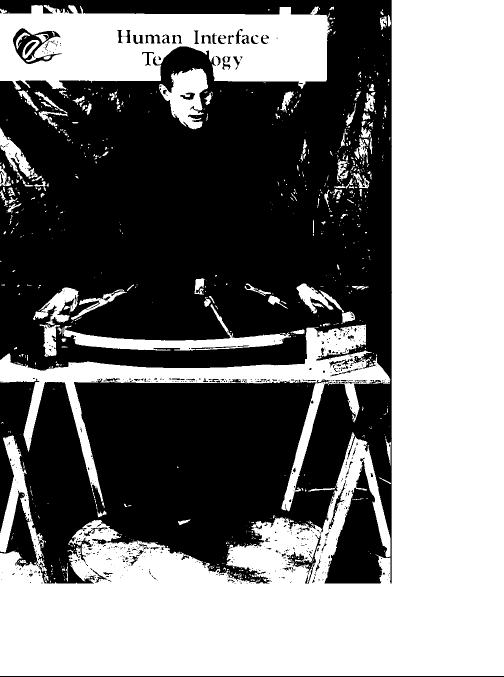
Figure 3. A proof-of-concept of the Virtual Motion Controller.
5. Features of Sufficient Motion Devices
In training, many skills consist of physical elements (exertion) and cognitive elements.
Using fighter pilot training as an analogy, a simulator can be effective in a training regime if
it provides cognitive training (enemy attack patterns, responses to those patterns etc.)
without all of the physical stressors (g, heat etc.). After the pilot has learned the cognitive
task he can then rehearse them under more stressful real world conditions. The concept
being proposed provides sufficient motion for creating a sense of realism, but removes the
need for physical exertion. It is envisioned that the cognitive and physical elements can be
integrated in other, real-world training environments.
One of the justifications for full-motion is that the exertion required to move through an
environment provides the user with a sense of the size of the space (Reiser et al 1995).
However it is also known that this sense is plastic. Research by Pelah and Barlow (1996)
had subjects run on a treadmill and then measured their walking speed on solid ground.
The subjects showed a decrease in speed, indicating that after running and getting nowhere
on the treadmill their brains had re-calibrated the link between what the eyes saw and what
the body felt. The aftereffect lasted about 10 minutes, and was less marked for subjects
with more treadmill experience. This plasticity may work to the advantage of the sufficient
motion simulator, as users learn to link limited motion with movement through the virtual
world.
Sufficient motion opens up the realm of locomotion with minimal effort. Users who may
be discouraged by the need to run to participate in a VR game (or may be unable) could
still experience the thrill without the exertion.

6. A proof of concept
We developed a simple virtual world, comprised of seven tunnels spread out over a flat,
smooth floor. Participants were asked to navigate, using the VMC, from one end of the
floor, through the tunnels, to the other end. Of the approximately thirty participants, most
navigated the course in from one to three minutes. Overall, the feedback that we received
was encouraging. People liked using their bodies to control their virtual movement.
Furthermore, the device was very intuitive; people began to navigate immediately with no
procedural instructions.
From this initial group of participants we learned that the correct tuning of the movement
rules is critical. Any discontinuities in velocity and acceleration cause significant difficulty.
We also found evidence that vertical translation should be constrained for terrestrial
navigation tasks.
7. Future Work
There are four areas that we will concentrate on in our future work. These are: training,
performance testing, simulator sickness and concept refinement.
Training will compare subjects who learn to navigate in a real world, with those who are
trained to navigate in a virtual world, using the VMC. This experiment will be part of an
ongoing investigation into the transfer of training being conducted by the Department of
Psychology at the University of Washington.
Our performance studies will compare the VMC with the Logitech Cyberman, the Division
Helmet and Wand, and a force-feedback joystick that we have developed. We will evaluate
subject performance, assessing both speed and accuracy for navigational tasks. Dependent
variables will include: the number of collisions made by the subject, the course completion
time, and the distance deviations from the optimal paths. Furthermore, we will compare
the user's sense of spatial orientation while navigating, by monitoring their frequency and
duration of map checks and recorded verbal protocol. The results from this experiment will
be presented at the VRAIS conference.
Simulator sickness is a potentially serious impediment to the implementation of VR
applications. The Human Interface Technology Lab is currently pursuing a research
program in simulator sickness, funded by the Air Force Office of Scientific Research.
During the course of the development of the VMC we will compare it with other
navigational techniques to determine whether whole-body involvement in locomotion
affects simulator sickness.
Finally, concept refinement refers to both refinements of the particular embodiments
(different feedback, different tracking methods etc.) and to refinements of the movement
rules and algorithms. Figure 4 shows one such area of exploration. The VMC allows
extraordinary turning performance in comparison with real pedestrian movement. This
may be advantageous or not We would like to determine which, and tune the system
accordingly.
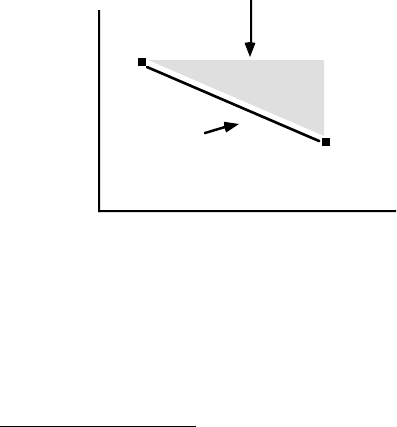
rate of turn
speed
possible with
the VMC in virtual
world
possible in the
real world
Figure 4. Rate of turn vs. speed for a pedestrian in the real world, and that possible using
the VMC in a virtual world.
8. References
Brooks, Frederick P. Jr. (1992). Final Technical Report Walkthrough Project. (TR 92-
026 to Computer and Information Science and Engineering National Science Foundation).
Chapel Hill: Department of Computer Science, University of North Carolina.
Gibson, J. J. (1958). Visually Controlled Locomotion and Visual Orientation in Animals.
In E. Reed and R. Jones (Eds.), Reasons for Realism, (pp. 148-163). Hillsdale, New
Jersey: Lawrence Erlbaum Associates.
Iwata, H. and Fuji T. (1996). Virtual Perambulator: A Novel Interface Device for
Locomotion in Virtual Environment. Proceedings of the IEEE 1996 Virtual Reality
International Symposium: IEEE Computer Science Press, 1996.
Pausch, Randy, Burnette, Tommy, Brockway, Dan & Weiblen, Michael E. (1995).
Navigation and Locomotion in Virtual Worlds via Flight into Hand-Held Miniatures. In
Robert Cook (ed.), Computer Graphics Proceedings: SIGGRAPH 95 Conference
Proceedings (pp. 399-400). New York: The Association for Computing Machinery, Inc.
Pelah, A. and Barlow, H.B. (1996). Visual illusion from running. Nature, vol. 381, p
283.
Pratt, D. R. (1996). Untitled Electronic Mail document sent to Barry Peterson (Human
Interface Technology Lab), describing the Sarcos Uniport and Treadport Interface Devices,
dated March 9, 1996.
Reiser, J.J., Pick, H.L., Ashmead, D.H., and Garing, Ann (1995) Calibration of human
locomotion and models of perceptual-motor organization. Journal of Experimental
Psychology: Human Perception and Performance. Vol. 21 480-497
Slater, Mel, Usoh, Martin Usoh & Steed, Anthony (1995). Taking Steps: The Influence
of a Walking Technique on Presence in Virtual Reality. ACM Transactions on Computer-
Human Interaction Special Issue on Virtual Reality Software and Technology, (pp. 201-
219). New York: Association for Computing Machinery.
